一种自动驾驶轨迹规划中车辆协同避撞方法及系统
本发明涉及自动驾驶,尤其涉及一种自动驾驶轨迹规划中车辆协同避撞方法及系统。
背景技术:
1、伴随汽车行业由电动化比拼转向智能化较量,自动驾驶技术也迎来快速发展的契机。自动驾驶的轨迹规划,是由车辆的车载自动驾驶计算机系统的轨迹规划子系统,基于自动驾驶机的路径规划子系统所算得的既定路径,根据自动驾驶机的交通环境感知子系统所实时感知的交通情境信息、车外路障信息,在行驶途中预先计算生成自身车辆的确定性的未来轨迹——即车辆从当前时刻当前位置行驶至道路下游某一位置的轨迹——其中“车辆应在何时、应在何处进行车道变更”是最重要的轨迹内容,从而指引本车在上述的未来时间窗口之内合法地、安全、高效地完成既定路径的行驶;其核心任务之一是本车与邻近车辆之间的避撞,即避免本车轨迹与邻车轨迹之间的冲突;而业界主流的避撞的技术范式是基于单车智能的“实时冲突感知-实时避撞决策”,即:本车自动驾驶机实时感知邻车各种潜在的概率性的未来轨迹,并据此来实时决策本车的未来规划轨迹,以规避本车与邻车之间的轨迹冲突即路权冲突——其中,“实时冲突感知”在数学上一般至少包括三个步骤:
2、①基于本车的车载传感来实时探测邻车的历史轨迹;
3、②基于邻车的历史轨迹来对于邻车的轨迹进行数据驱动的建模;
4、③基于邻车的轨迹模型来实时预测邻车的未来可能轨迹。
5、但本车的自动驾驶机与邻车的自动驾驶机之间,因缺少信息交互渠道所导致信息不对称、信息不充分,使得上述的单边实时冲突感知的三个步骤其本质是“单边猜测”,即本车所感知的邻车未来可能轨迹其实质是本车对于邻车未来规划轨迹的预测估算。
6、从单方决策的技术角度看,单边猜测计算过程的实时性要求高、算力成本要求高,其计算结果欠缺可靠性、欠缺通用性,对于不同的国家地区、不同的高/平/低峰时段、不同的交通法律、不同的总体车辆技术水平、不同的驾驶文化等条件下的计算结果,难以通用;
7、更进一步,在涉及到相邻车道的两车或多车、极易诱发车辆侧向撞车事故的变更车道情境中,从多方决策的技术角度看,本车自动驾驶机与邻车自动驾驶机之间各自为政、相互猜测,并且,各方的单边互猜,互为因果、互耦合、互反馈——甚至是无穷循环的互耦互馈,将增加各方感知的不确定性和各方决策的不稳定性,进一步导致算力成本的增加、结果可靠性的降低。
8、由此,在“单边实时冲突感知”这种单车独立控制的技术范式之中,如何打破本车自动驾驶机与邻车自动驾驶机之间的“信息不对称/信息不充分”的屏障、实现信息充分与信息对称,如何提升“单边实时冲突感知”的计算可靠性、降低其计算成本,事关自动驾驶车辆避撞的降本增效。
技术实现思路
1、本技术实施例通过提供一种自动驾驶轨迹规划中车辆协同避撞方法,包括以下步骤:
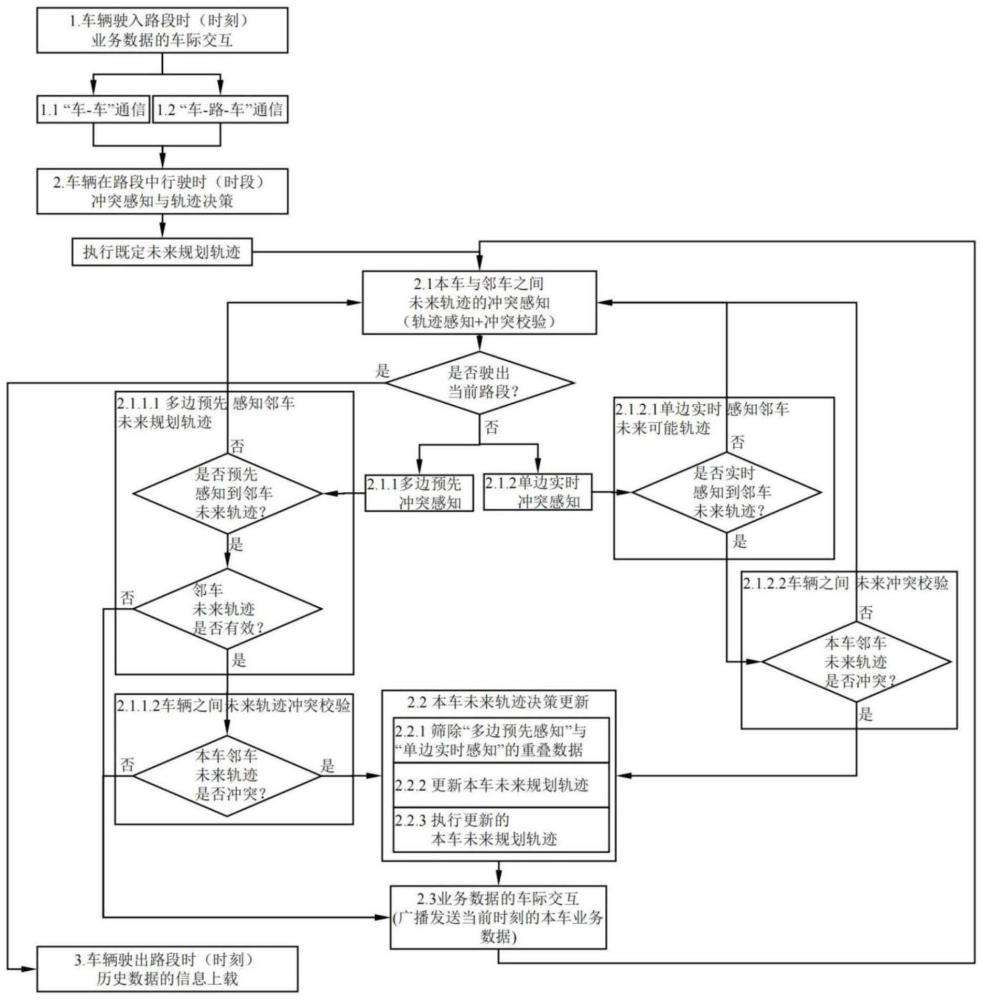
2、步骤1,在本车驶入当前路段的实际时刻,进行业务数据的车际交互,本车自动驾驶机利用车联网无线通信技术,将本车的车辆避撞业务数据发送至无线通信有效半径不低于200m的覆盖范围之内的所有邻车;
3、步骤2,在本车在当前路段中行驶时段内,进行冲突感知与轨迹决策;所述冲突感知包括两种技术范式:本车针对自动驾驶邻车的预先冲突感知+本车针对手动驾驶邻车的实时冲突感知,每种技术范式各自包括两个技术环节:轨迹感知+冲突校验;所述轨迹决策包括两种技术范式:本车针对自动驾驶邻车的预先避撞决策+本车针对手动驾驶邻车的实时避撞决策;
4、步骤3,在车辆驶出当前路段实际时刻,进行历史数据的信息上载,进行“车-路-云”通信,将车辆从当前路段起点至当前车辆空间位置的历史轨迹发送至路侧计算机,进而转发至中心计算机,用于相关数据的统计分析。
5、优选的,所述步骤1中业务数据包括四个部分,各个部分之间按序衔接组合:
6、(1)本车自动驾驶机无线通信网络地址;
7、(2)本车路权优先级序号;
8、(3)当前时刻本车自动驾驶机所生成的未来规划轨迹;
9、(4)本车自动驾驶机生成当前业务数据的时刻时间戳,基于internet时刻,精度取“秒”。
10、优选的,所述无线通信方式包括以下两种方式:
11、(1)“车—车”直接无线通信,数据流向:本车—邻车;
12、(2)“车—路—车”间接无线通信,数据流向:本车—路侧计算机—邻车。
13、优选的,所述本车路权优先级序号包括六项内容,各项内容之间按序衔接组合:
14、(2.1)驶入时刻的时间戳;
15、(2.2)驶入时刻本车在当前路段所处于的车道序号;
16、(2.3)驶入时刻本车驾驶自动机所生成的未来规划轨迹数据生成时刻的时间戳;
17、(2.4)驶入时刻本车驾驶自动机所生成的未来规划轨迹数据之中时间序列最末时刻的倒数;
18、(2.5)驶入时刻本车驾驶自动机所随机生成的一个随机数字;
19、(2.6)本车的车辆号牌号码。
20、不同车辆的路权优先级序号可相互对比,以分出路权优先级的高低——基于internet时间的时间戳、车辆号牌号码等数字或字符的对比方法:数字0至9、英文字母a至z、非英文字母,均转换为10进制的计算机编码,数值越小则优先级越高。
21、优选的,所述冲突感知包括:本车针对自动驾驶邻车的预先的轨迹感知及冲突校验,适用于“车-车”通信实现车辆间信息交互的条件,为后续的“协同预先避撞决策”奠定基础;本车针对手动驾驶邻车的实时的轨迹感知及冲突校验,适用于缺少“车-车”通信或因通信失效而不存在车辆间信息交互的条件,为后续的“单车实时避撞决策”奠定基础。
22、优选的,所述本车针对自动驾驶邻车的预先的轨迹感知包括:基于车-车通信来预先确悉邻车的未来规划轨迹,且仅仅存储和处理路权优先级高于本车的自动驾驶邻车的未来规划轨迹。
23、优选的,所述本车针对手动驾驶邻车的实时的轨迹感知包括:基于车载传感来实时探测邻车的历史轨迹、基于所述历史轨迹来构建邻车的轨迹模型、基于所述轨迹模型来实时预测邻车的未来可能轨迹。
24、优选的,所述步骤2中(避撞)轨迹决策,具体为:
25、步骤221,筛除“多边预先冲突感知”与“单边实时冲突感知”的重叠数据;
26、步骤222,更新本车未来规划轨迹;
27、步骤223,执行更新的本车未来规划轨迹。
28、优选的,所述步骤222中本车未来规划轨迹具体为:
29、车辆的可行轨迹,
30、
31、其中,j为车辆标识号;t0表示当前时刻;表示第j车辆未来轨迹之中所包含的当前路段的驶出时刻;
32、t∈{t0,t0+dt,t0+2dt,...,te},简记为dt是数据采样间隔时长;xi(t)表示t时刻的空间方位数据。
33、优选的,所述车辆可行轨迹约束条件包括:
34、(1)
35、(2)
36、
37、(3) 即
38、dist(xj(t),x(t):x(t)∈{xobstacle(t)})=+∞
39、其中:
40、约束条件(1),是车辆路径约束条件,其中,表示第j车辆未来轨迹之中的当前路段驶出时刻的空间坐标;是路径规划子系统所算得的既定路径之中当前路段终点的空间坐标;
41、约束条件(2),是实现车辆功能的内部条件的约束条件,其中,dist(xj(t),xj(t+dt))表示时间间隔为dt的两个相邻时空点之间的时空间距,
42、分别表示经度方向、维度方向上车辆的最大可能行驶速度,
43、分别表示经度方向、维度方向上车辆的最大可能驱动加速度。
44、约束条件(3),是实现车辆功能的外部条件的约束条件:其中,xobstacle(t)、{xobstacle(t)}分别表示路障点、路障点集合。
45、本技术还提供了一种自动驾驶轨迹规划中车辆协同避撞系统,包括:
46、车际交互模块,用于在本车驶入当前路段的实际时刻,进行业务数据的车际交互,将本车的车辆避撞业务数据发送至覆盖范围之内的所有邻车;
47、感知决策模块,用于在本车在当前路段中行驶时刻,进行冲突感知与轨迹决策;
48、信息传输模块,用于在车辆驶出当前路段实际时刻,进行历史数据的信息上载,将车辆从当前路段起点至当前车辆空间位置的历史轨迹发送至路侧计算机,进而转发至中心计算机,用于相关数据的统计分析。
49、本技术实施例中提供的一个或多个技术方案,至少具有如下技术效果或优点:
50、本专利所提出的方法,在相互邻近的自动驾驶车辆之间,利用车联网的“车-车”或“车-路-车”通信技术,打破车辆之间的“信息不对称/信息不充分”屏障,实现车辆间的多边信息交互即“车车对话”,使得自动驾驶机之间不再需要相互“猜测”对方的未来(不确定性的)可能轨迹、而是能够相互确悉对方的未来(确定性的)规划轨迹,从而能在“车车协同”条件下更可靠地规避车辆之间的轨迹冲突;就自动驾驶车辆“避撞”轨迹规划的技术范式而言,本专利所提出的方法,在业界主流的“单边实时冲突感知(基于车载传感来实时探测邻车的历史轨迹+基于邻车历史轨迹来构建邻车的轨迹模型+基于邻车轨迹模型来实时预测邻车的未来可能轨迹)-单车实时避撞决策(本车的未来规划轨迹)”的基础上,增补扩充“多边预先冲突感知(基于车-车通信预先确悉邻车的未来规划轨迹)-协同预先避撞决策(本车的未来规划轨迹)”,从而在单车智能的基础上,降本增效地实现车车协同的避撞(降低自动驾驶机避撞计算过程的成本、提升避撞计算结果的确定性与稳定性)。
51、本技术既适用于自动驾驶车辆所构成的车流,也适用于自动驾驶车辆与手动驾驶车辆的混合车流——自动驾驶车辆之间采用“多边预先冲突感知-协同预先避撞决策”技术范式、而自动驾驶车辆针对手动驾驶车辆则采用“单边实时冲突感知-单车实时避撞决策”技术范式。
- 还没有人留言评论。精彩留言会获得点赞!