一种自动清扫机器人
1.本发明涉及清洁机器人技术领域,尤其是涉及一种自动清扫机器人。
背景技术:
2.服务机器人是21世纪高技术服务业的重要组成部分,发展服务机器人是我国高科技产业发展的一次重大机遇,对于提升国家竞争力具有重大战略意义。清洁机器人作为为人类服务的特种机器人,是服务机器人不可或缺的一部分。清洁机器人涉及到机构学、运动学、导航和路径规划等关键科学问题,是近年来国内外学者重点研究的领域之一,同时清洁机器人技术作为近些年新兴起的高新技术,国内外各大智能机器人厂商都对其做了广泛的深入研究。
3.随着生活水平的提高,健康、舒适的生活环境越来越受到人们的关注,清洁机器人也广泛地用于道路、小区、公园、校园等的清扫。但是,考虑到成本问题和安全性问题,现有清洁机器人实现的功能比较单一,不能适应多种场合的运用,可靠性低,大部分清扫功能仍是环卫工人人工完成的,或者由环卫工人和清洁机器人相配合完成的,如环卫工人驾驶环卫车完成街道垃圾的清扫。
技术实现要素:
4.本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种自动清扫机器人,增设了传感器模块、导航模块和通信模块,能够检测清扫机器人的工作环境并将其通过通信模块传输,便于工作人员进行远程操控,降低了工作人员的负担;清扫模块包括清扫机、机械手和吸尘器,可以清扫不同类型的垃圾,适用范围广,清扫效果好。
5.本发明的目的可以通过以下技术方案来实现:
6.一种自动清扫机器人,包括机架,所述机架上安装有驱动模块、清扫模块、垃圾箱、供电模块和控制器,所述机架上还安装有传感器模块、导航模块、遥控模块和通信模块;
7.所述驱动模块用于移动所述自动清扫机器人;所述清扫模块包括设于机架后端的清扫机、设于机架前端的机械手和吸头设于机架前端的吸尘器,用于清扫垃圾;所述垃圾箱用于存放垃圾;
8.所述供电模块用于为驱动模块、清扫模块、垃圾箱、传感器模块、通信模块和控制器提供工作电源;
9.所述传感器模块包括人体感应器、摄像头、反射型光电传感器组件、超声波测距装置和位移传感器;
10.所述遥控模块包括nrf芯片;
11.所述导航模块为gps模块;所述通信模块为4g无线传输模块;
12.所述控制器分别与驱动模块、清扫模块、传感器模块和通信模块连接,所述传感器模块与通信模块连接。
13.进一步的,所述机架下方包括底盘,驱动模块安装在底盘上,驱动模块包括驱动轮
和驱动电机;
14.所述驱动轮包括2个设于底盘前端且相互对称的行进轮、2个设于底盘后端且相互对称的万向轮,2个行进轮之间通过曲轴连接,2个万向轮之间通过曲轴连接,底盘中心设有联轴器,所述联轴器用于连接行进轮所在的曲轴和万向轮所在的曲轴;
15.所述驱动电机的数量为4个,与控制器通信连接,每个驱动电机分别与1个驱动轮连接。
16.进一步的,所述清扫机包括驱动系统、连杆和2个清洁圆盘,所述清洁圆盘包括圆形刷头和与圆形刷头连接的刷架,2个清洁圆盘的刷架与连杆转动连接,所述驱动系统分别与刷架和连杆连接,用于带动2个清洁圆盘旋转和升降。
17.进一步的,所述机械手包括动力系统、手臂和抓手,所述手臂的底端与机架转动连接,所述抓手与手臂的顶端转动连接,所述动力系统分别与手臂和抓手连接,用于驱动机械手抓取垃圾。
18.更进一步的,所述垃圾箱包括第一垃圾箱,第一垃圾箱设于机架上方,安装于机械手的转动范围内,用于存放机械手抓取的垃圾。
19.更进一步的,所述机架上设有凹槽,凹槽的形状和大小与第一垃圾箱的形状和大小相配合,所述凹槽的侧壁上设有电动开合的卡扣,第一垃圾箱通过卡扣可拆卸安装在凹槽内。
20.更进一步的,所述凹槽内还设有有升降台,所述升降台通过升降电机连接至凹槽的底面,升降台在升降电机的带动下相对于凹槽的底面升降。
21.更进一步的,所述升降台的顶面上安装有压力传感单元,所述压力传感单元与控制器通信连接。
22.更进一步的,所述垃圾箱还包括第二垃圾箱,吸尘器的吸尘管道连接至第二垃圾箱,所述第二垃圾箱用于存放吸尘器吸取的灰尘。
23.进一步的,所述人体感应器和摄像头安装于自动清扫机器人的正前方,分别用于感应自动清扫机器人正前方的人体信号和采集自动清扫机器人正前方的图像;
24.所述反射型光电传感器组件的数量至少为4个,分别安装在自动清扫机器人的前方、后方和两侧;
25.所述超声波测距装置的数量至少为4个,分别安装在自动清扫机器人的前方、后方和两侧。
26.与现有技术相比,本发明具有以下有益效果:
27.(1)增设了传感器模块、导航模块和通信模块,能够检测清扫机器人的工作环境并将其通过通信模块传输,便于工作人员进行远程操控,降低了工作人员的负担。
28.(2)清扫模块包括清扫机、机械手和吸尘器,可以清扫不同类型的垃圾,适用范围广,清扫效果好。
29.(3)第一垃圾箱放置在机架上的凹槽内,通过升降机构升降,便于第一垃圾箱的取放,降低了工作人员的负担;通过压力传感单元感知第一垃圾箱内的垃圾重量,能及时报警,以免损伤清扫机器人。
附图说明
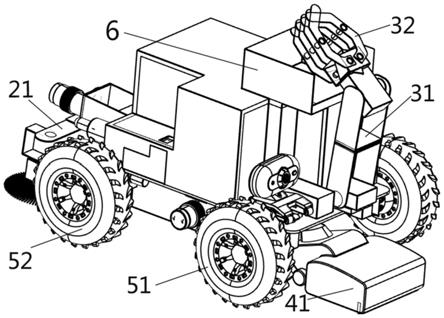
30.图1为实施例中自动清扫机器人的整体结构示意图;
31.图2为实施例中自动清扫机器人的整体结构示意图;
32.图3为实施例中自动清扫机器人的侧视图;
33.图4为实施例中自动清扫机器人的前视图;
34.图5为实施例中自动清扫机器人的后视图;
35.图6为实施例中自动清扫机器人的俯视图;
36.图7为实施例中自动清扫机器人的截面图;
37.图8为实施例中自动清扫机器人的仰视图;
38.附图标记:1、控制器,2、清扫机,21、连杆,22、清洁圆盘,3、机械手,31、手臂,32、抓手,4、吸尘器,41、吸头,42、吸尘通道,43、风机,5、驱动轮,51、行进轮,52、万向轮,6、第一垃圾箱,7、第二垃圾箱。
具体实施方式
39.下面结合附图和具体实施例对本发明进行详细说明。本实施例以本发明技术方案为前提进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。
40.实施例1:
41.一种自动清扫机器人,如图1至图8所示,包括机架,机架上安装有驱动模块、清扫模块、垃圾箱、供电模块和控制器1,机架上还安装有传感器模块、导航模块、遥控模块和通信模块;
42.驱动模块用于移动自动清扫机器人;清扫模块包括设于机架后端的清扫机2、设于机架前端的机械手3和吸头41设于机架前端的吸尘器4,用于清扫垃圾;垃圾箱用于存放垃圾;供电模块用于为驱动模块、清扫模块、垃圾箱、传感器模块、通信模块和控制器1提供工作电源;传感器模块包括人体感应器、摄像头、反射型光电传感器组件、超声波测距装置和位移传感器;导航模块为gps模块;遥控模块包括nrf芯片;通信模块为4g无线传输模块;控制器1分别与驱动模块、清扫模块、传感器模块和通信模块连接,传感器模块与通信模块连接。本实施例中,控制器1为stm32f103vet6单片机。
43.本实施例中,机架下方包括底盘,驱动模块安装在底盘上,驱动模块包括驱动轮5和驱动电机;驱动轮5包括2个设于底盘前端且相互对称的行进轮51、2个设于底盘后端且相互对称的万向轮52,2个行进轮51之间通过曲轴连接,2个万向轮52之间通过曲轴连接,底盘中心设有联轴器,联轴器用于连接行进轮51所在的曲轴和万向轮52所在的曲轴;驱动电机的数量为4个,与控制器1通信连接,每个驱动电机分别与1个驱动轮5连接。
44.本实施例中,驱动电机采用12v直流减速电机,由于单片机i/o口输出电平的功率有限,因此用l298n驱动板驱动直流电动机,为了实现对其转速和方向的控制,此处采用l298n控制板,载有一块l298n芯片的驱动板可同时驱动两路直流电机,其中每一路的控制端都有三个接口,分别为in1、in2、ena,其中ena为使能端,只有ena端输入高电平时,驱动板才会输出电流驱动电机运转,一般通过控制ena的高低电平时间来控制电机转速,即通过单片机i/o口输出pwm波,调节其占宽比即可调节ena端高低电平所占比例,从而调节电机运转
速度。in1和in2端配合控制输出端的状态。
45.考虑到清扫时可能存在狭小的工作环境,本实施例中采用差动驱动结构,差动驱动结构使得清扫机器人具有在狭小空间中快速移动的能力。
46.清扫机2包括驱动系统、连杆21和2个清洁圆盘22,清洁圆盘22包括圆形刷头和与圆形刷头连接的刷架,2个清洁圆盘22的刷架与连杆21转动连接,驱动系统分别与刷架和连杆21连接,用于带动2个清洁圆盘22旋转和升降。本实施例中,驱动机构包括996舵机和tt电机,2个清洁圆盘22上还分别设有开关,用于控制清洁圆盘22的启动和关闭。
47.机械手3包括动力系统、手臂31和抓手32,手臂31的底端与机架转动连接,抓手32与手臂31的顶端转动连接,动力系统分别与手臂31和抓手32连接,用于驱动机械手3抓取垃圾。本实施例中,驱动系统包括996舵机,舵机设于机架上方前端,并且通过螺钉与抓手32连接。
48.垃圾箱包括第一垃圾箱6,第一垃圾箱6设于机架上方,安装于机械手3的转动范围内,用于存放机械手3抓取的垃圾。
49.机架上设有凹槽,凹槽的形状和大小与第一垃圾箱6的形状和大小相配合,凹槽的侧壁上设有电动开合的卡扣,第一垃圾箱6通过卡扣可拆卸安装在凹槽内。凹槽内还设有有升降台,升降台通过升降电机连接至凹槽的底面,升降台在升降电机的带动下相对于凹槽的底面升降。升降台的顶面上安装有压力传感单元,压力传感单元与控制器1通信连接。
50.通过升降台可以方便的将第一垃圾箱6自凹槽内取放,减轻了工作人员的负担,通过压力传感单元可以得知当前第一垃圾箱6内放置的垃圾的重量,如果超过清扫机器人的负荷,则报警,或机械手不再工作。
51.垃圾箱还包括第二垃圾箱7,吸尘器4的吸尘管道42连接至第二垃圾箱7,风机43工作,将灰尘自吸头41吸入,经过吸尘通道42后存放在第二垃圾箱7内,可以在风机43与第二垃圾箱7之间设置滤板,防止垃圾进入风机43以阻碍风机43工作,风机43内部的过继电机控制风机43高速旋转形成压强差,帮助吸尘器4的吸头41完成灰尘的吸取。
52.人体感应器和摄像头安装于自动清扫机器人的正前方,分别用于感应自动清扫机器人正前方的人体信号和采集自动清扫机器人正前方的图像;反射型光电传感器组件的数量至少为4个,分别安装在自动清扫机器人的前方、后方和两侧;超声波测距装置的数量至少为4个,分别安装在自动清扫机器人的前方、后方和两侧。
53.在具体使用过程中,清扫机器人分为自动模式和半自动模式。
54.自动模式下,用户输入设置好的清扫路线,控制器1通过驱动模块、导航模块控制清扫机器人按照清扫路线移动,清扫机2旋转,清洁圆盘22将地面上的污渍擦除;机械手3捡拾垃圾并将其放入第一垃圾箱6,;吸尘器4的风机43工作,通过吸头41和吸尘管道42将灰尘吸入第二垃圾箱7。
55.传感器模块中的人体感应器感应正前方的人体信号,如果感应到人体,则清扫机器人停止移动,原地等待,当正前方没有检测到人体信号时,继续移动;摄像头持续采集正前方的图像信息;位移传感器记录清扫机器人的位移信息,反射型光电传感器组件和超声波测距装置用来检测清扫机器人四周的障碍物信息。本实施例中,摄像头为usb摄像头,人体感应器为微波感应器。
56.通信模块可以将传感器模块的检测数据传输至工作人员的智能终端上,工作人员
可以随时查看清扫机器人的位置、状态、四周情况等。
57.遥控模块包括nrf芯片,工作人员可以通过遥控器远程遥控清扫机器人。
58.为了实现自动清扫垃圾,可以在控制器1中内置图像识别程序,基于摄像头采集的图像判断垃圾、障碍物的大小,进而自动捡拾、清扫或避障。
59.半自动模式下,工作人员可以通过摄像头传输的视频实时观察到当前环境,从而远程遥控清扫机器人进行吸尘、垃圾捡拾、移动、停止移动、躲避障碍物等操作。
60.以上详细描述了本发明的较佳具体实施例。应当理解,本领域的普通技术人员无需创造性劳动就可以根据本发明的构思作出诸多修改和变化。因此,凡本技术领域中技术人员依本发明的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1