用于架设浮桥的浮桥块自动对接控制系统及方法
1.本发明属于水上交通设施领域,具体是一种用于架设浮桥的浮桥块自动对接控制系统及方法。
背景技术:
2.在军事作战和抢险救灾中常需要在水面上架设临时浮桥,便于人员和物资的运输。传统临时浮桥多数没有动力装置,需要人工划桨,有动力装置的需要人工驾驶;传统临时浮桥连接结构为销孔结构,这种结构需要对准才能连接,对接难度大。因此传统临时浮桥架设耗费人力,耗时长,效率低。
技术实现要素:
3.针对现有技术的不足,本发明提供一种用于架设浮桥的浮桥块自动对接控制系统及方法,解决了传统临时浮桥架设耗费人力、耗时长、效率低的问题。
4.为实现以上目的,本发明采用如下技术方案:一种用于架设浮桥的浮桥块自动对接控制系统,包括岸基控制端和浮桥块控制端;
5.所述岸基控制端包括计算机和第一无线通信模块;
6.所述浮桥块控制端设置在各浮桥块上,包括定位传感模块、第二无线通信模块、stm32控制器、电机控制单元、双螺旋桨推进器;所述stm32控制器连接定位传感模块、第二无线通信模块和电机控制单元,电机控制单元连接双螺旋桨推进器,所述stm32控制器处理岸基控制端的控制信息,控制电机控制单元,从而控制浮桥块的运动;
7.所述岸基控制端与各浮桥块控制端双向通信,各浮桥块控制端向岸基控制端发送浮桥块的位置、航向、速度和障碍物信息,岸基控制端向各浮桥块控制端发送控制信息。
8.进一步的,所述定位传感模块包括gps模块、姿态传感器、摄像头和测距传感器;
9.gps模块用于采集浮桥块的位置信息;
10.姿态传感器用于采集浮桥块的航向和速度信息;
11.摄像头设置在浮桥块前端,用于采集浮桥块前端的障碍物信息,寻找对接目标和判断是否正对对接目标;
12.测距传感器用于采集浮桥块前端与障碍物和对接目标的距离。
13.进一步的,所述浮桥块设有对接机构,对接机构包括主动对接机构和被动对接机构,分别设置在浮桥块前端和后端。
14.进一步的,所述主动对接机构包括对接杆和对接球头,对接杆上设有多个弹簧楔,弹簧楔一端固定在对接杆上,另一端在弹簧上,弹簧楔可绕固定端转动;所述被动对接机构包括接纳锥和接纳通道,接纳通道底壁设有缓冲弹簧;
15.对接球头沿着接纳锥进入接纳通道,弹簧楔接触通道壁过程中被压缩,当对接球头接触并压缩缓冲弹簧过程中,弹簧楔完全进入接纳通道,恢复为自然状态,弹簧楔卡在接纳通道,实现对接锁闭。
16.一种用于架设浮桥的浮桥块自动对接控制方法,该方法利用上述系统实现,具体包括如下步骤:
17.步骤一、在各浮桥块下水后,岸基控制端根据各浮桥块与对岸目标点的距离对各浮桥块设置编号和优先级,设置各浮桥块的目标点和运动路径,向各浮桥块控制端发送控制信息;
18.步骤二、浮桥块控制端接收处理岸基控制端的控制信息,控制浮桥块向目标点运动;
19.步骤三、浮桥块控制端实时采集浮桥块运动时的位置、航向、速度和障碍物信息,并通过第二无线通信模块发送给岸基控制端,岸基控制端根据各浮桥块的信息调整各浮桥块的运动路径,并向各浮桥块控制端发送控制信息,各浮桥块根据控制信息调整航向;
20.步骤四、在各浮桥块到达目标点后,开始一个接一个进行对接;浮桥块通过安装在前端的摄像头寻找对接目标,找到对接目标后调整方向通过测距传感器获取与对接目标的距离,然后向对接目标靠近;浮桥块根据摄像头的图像信息不断调整位置直至正对对接目标;浮桥块与对接目标开在一定的位置姿态偏差的条件下始与对接目标进行对接。
21.进一步的,在各浮桥块向目标点运动的过程中,若有浮桥块之间的距离低于设定阈值,优先级低的浮桥块静止不动,充当障碍物,优先级高的浮桥块调整方向避开障碍物,向目标点运动。
22.进一步的,采用两组杆锥式对接机构,对接机构包括主动对接机构和被动对接机构,分别设置在浮桥块前端和后端。
23.所述主动对接机构包括对接杆和对接球头,对接杆上设有多个弹簧楔,弹簧楔一端固定在对接杆上,另一端在弹簧上,弹簧楔可绕固定端转动;
24.所述被动对接机构包括接纳锥和接纳通道,接纳通道底壁设有缓冲弹簧;
25.对接球头沿着接纳锥进入接纳通道,弹簧楔接触通道壁过程中被压缩,当对接球头接触并压缩缓冲弹簧过程中,弹簧楔完全进入接纳通道,恢复为自然状态,弹簧楔卡在接纳通道,实现对接锁闭;分离时,拆开盖板,压住弹簧楔,进行对接机构的手动分离。
26.与现有技术相比,本发明的有益效果为:本发明提供了一种用于架设浮桥的浮桥块自动对接控制系统,能够控制各浮桥块自动运动到各自目标点然后自动进行一一对接,减少了人工劳动量,节省了大量人力物力,提高了架设浮桥的效率,节省了架设浮桥的时间。
附图说明
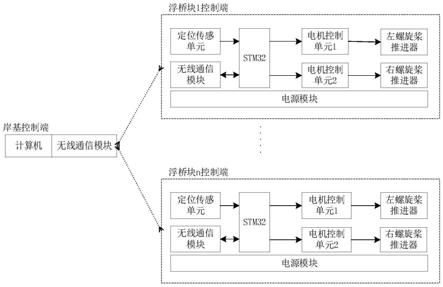
27.图1为用于架设浮桥的浮桥块自动对接控制系统的示意图。
28.图2为浮桥块杆锥式对接机构主动对接机构示意图。
29.图3为浮桥块杆锥式对接机构被动对接机构示意图。
30.图4为浮桥块杆锥式对接机构对接过程示意图。
31.图5浮桥块杆锥式对接机构对接过程示意图。
32.图6浮桥块杆锥式对接机构对接锁闭示意图。
33.图中,1、对接杆;2、弹簧楔;3、对接球头;4、接纳锥;5、接纳通道;6、缓冲弹簧;7、盖板。
具体实施方式
34.下面结合附图对本发明做进一步的解释。
35.如图1所示,一种用于架设浮桥的浮桥块自动对接控制系统,包括岸基控制端和浮桥块控制端。所述岸基控制端包括计算机和第一无线通信模块。所述浮桥块控制端设置在各浮桥块上,包括定位传感模块、第二无线通信模块、stm32控制器、电机控制单元、双螺旋桨推进器等。所述stm32控制器连接定位传感模块、无线通信模块和电机控制单元。所述电机控制单元连接双螺旋桨推进器。
36.所述定位传感模块包括gps模块、姿态传感器、摄像头、测距传感器。gps模块用于采集浮桥块的位置信息;姿态传感器用于采集浮桥块的航向和速度信息;摄像头设置在浮桥块前端,用于采集浮桥块前端的障碍物信息,寻找对接目标和判断是否正对对接目标;测距传感器用于采集浮桥块前端与障碍物和对接目标的距离。
37.stm32控制器处理岸基控制端的控制信息,控制电机控制单元,从而控制浮桥块的运动。
38.岸基控制端与各浮桥块控制端双向通信,各浮桥块控制端向岸基控制端发送浮桥块的位置、航向、速度和障碍物信息,岸基控制端向各浮桥块控制端发送控制信息。
39.本发明还提供一种用于架设浮桥的浮桥块自动对接控制方法,其利用上述系统,步骤包括:
40.步骤一、在各浮桥块下水后,岸基控制端根据各浮桥块与对岸目标点的距离对各浮桥块设置编号和优先级,设置各浮桥块的目标点和运动路径,向各浮桥块控制端发送控制信息;
41.步骤二、浮桥块控制端接收处理岸基控制端的控制信息,控制浮桥块向目标点运动;
42.步骤三、浮桥块控制端实时采集浮桥块运动时的位置、航向、速度和障碍物信息,并通过无线通信模块发送给岸基控制端,岸基控制端根据各浮桥块的信息调整各浮桥块的运动路径,并向各浮桥块控制端发送控制信息,各浮桥块根据控制信息调整航向;
43.步骤四、在各浮桥块到达目标点后,开始一个接一个进行对接。浮桥块通过安装在前端的摄像头寻找对接目标,找到对接目标后调整方向通过测距传感器获取与对接目标的距离,然后向对接目标靠近。浮桥块根据摄像头的图像信息不断调整位置直至正对对接目标。浮桥块与对接目标在一定的位置姿态偏差的条件下开始与对接目标进行对接。
44.所述各浮桥块向目标点运动的过程中,若有浮桥块之间的距离低于设定阈值,优先级低的浮桥块静止不动,充当障碍物,优先级高的浮桥块调整方向避开障碍物,向目标点运动。
45.浮桥块对接采用两组杆锥式对接机构,对接机构包括主动对接机构和被动对接机构,分别设置在浮桥块前端和后端。
46.所述主动对接机构包括对接杆1和对接球头3,对接球头3位于对接杆1头部,对接杆1上设有多个弹簧楔2,如图2所示,弹簧楔2一端固定在对接杆上,另一端在弹簧上,弹簧楔可绕固定端转动。
47.所述被动对接机构包括接纳锥4和接纳通道5,接纳通道5底壁设有缓冲弹簧6,缓冲弹簧6位于接纳通道5轴线上,如图3所示。
48.当主动对接浮桥块与目标浮桥块,对接球头3沿着接纳锥4进入接纳通道5,如图4,弹簧楔2接触通道壁过程中被压缩,如图5所示,当对接球头3接触并压缩缓冲弹簧6过程中,弹簧楔2完全进入接纳通道5,恢复为自然状态,弹簧楔2卡在接纳通道5,如图6所示,实现对接锁闭。分离时,可拆开盖板7(盖板在接纳通道上方),压住弹簧楔2,进行对接机构的手动分离。
49.本发明能控制各浮桥块自动运动到各自目标点然后自动进行一一对接,减少了人工劳动量,节省了大量人力物力,提高了架设浮桥的效率,节省了架设浮桥的时间,实现了浮桥架设的自动化。
50.以上实施例仅用以说明本发明的技术方案,而非对其进行限制;应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1