铣刨机的卡车测量的制作方法
1.本发明总体上涉及铣刨机数据收集和使用。更具体地,本发明涉及一种用于铣刨机的核算和装载系统。更具体地,本发明涉及一种用于铣刨机的卡车核算系统和卡车感测和装载系统。
背景技术:
2.修建道路是为了方便车辆行驶。根据使用密度、基础条件、温度变化、湿度水平和/或物理老化,道路表面可能最终变得畸形;可能形成裂缝,使水进入导致冻融损坏;并且可能发生其它磨损。道路可能变得不能支撑车轮装载,或者可能不适于车辆交通。为了修复道路以便车辆继续使用,可以移除用过的道路材料以准备表面重修。
3.诸如冷刨机、松土机、取料机等的铣刨机可以用于破碎和移除沥青道路的层。取料机可以撕裂道路表面,将其与或不与添加剂混合,并将其放回作为用于附加铺路的基层。相反,冷刨机或松土机可以切割和移除道路表面。例如,冷刨机通常包括由履带式或轮式驱动单元推进的框架。框架支撑发动机、操作员站、铣刨滚筒和输送机。装配有切割工具的铣刨滚筒通过与发动机的适当接口旋转以铣刨道路表面。铣刨的道路材料由铣刨滚筒沉积到输送机上,输送机将铣刨的材料转移到拖运卡车中以便从工地移除。当拖运卡车装满时,它们被空的拖运卡车替换。装满的卡车将铣刨的材料运输到不同的位置,诸如沥青厂,以作为新沥青中的集料再利用或以其它方式再循环。重复该运输过程,直到铣刨过程完成。
4.出于各种目的,诸如计费、工作估计和正在进行的铺路操作,对于铣刨操作员来说,了解正在由铣刨机填充的卡车的数量和尺寸可能是有用的。当前的系统可能依赖于当卡车返回到具有铣刨材料的沥青厂时在沥青厂发生的计数。在许多情况下,沥青厂可能由参与表面重修项目的不同公司或承包商操作。
5.除了卡车的数量之外,关于卡车容量和填充体积的信息对于有效利用卡车资源而不使卡车超载的目的可能是有用的。在许多情况下,当前的填充操作依赖于视觉检查、填充水平的估计或其它用户判断来确定卡车何时和/或是否装满。这些判断可能是不准确的并且可能是有问题的。例如,如果卡车过满,则卡车公司可能由于超过道路限制的车轴装载而遭受罚款。此外,如果卡车填充不足,则项目的成本可能由于卡车效率低下而增加。
6.中国专利申请第201910940523号涉及一种卡车装载计数方法和系统。该申请讨论了一种获得安装在车辆上的装载定位设备的装载信息;根据装载信息判断车辆是否满载,如果满载,启动任务,获得装载定位设备的地理位置信息。
技术实现要素:
7.在一个或多个实施例中,一种铣刨机可以包括由牵引设备支撑的框架、用于铣刨表面并支撑在框架上的铣刨滚筒、以及用于从铣刨滚筒接收铣刨的材料并将铣刨的材料向上输送到释放点的输送机。铣刨机还可以包括经配置用于识别卡车的卡车传感器和与卡车传感器通信以与卡车传感器协调并保持和存储卡车计数的控制器。
8.在一个或多个实施例中,一种核算方法可以包括使用与卡车传感器协调的铣刨机上的控制器来监测卡车的铣刨机周围的区域。该方法还可以包括执行卡车的核算以生成卡车计数并存储卡车计数。
9.在一个或多个实施例中,一种铣刨机可以包括由牵引设备支撑的框架、用于铣刨表面并支撑在框架上的铣刨滚筒、以及用于从铣刨滚筒接收铣刨的材料并将铣刨的材料向上输送到释放点的输送机。铣刨机还可以包括装载传感器,其经配置用于监测铣刨机对卡车的装载;以及控制器,其与装载传感器通信以与装载传感器协调并且识别卡车何时装满。
10.在一个或多个实施例中,一种装载监测的方法可以包括获得体积、铣刨表面以产生铣刨的材料、以及将铣刨的材料输送到卡车箱子中。该方法还可以包括扫描卡车箱子以获得材料体积并将材料体积与体积进行比较。
11.在一个或多个实施例中,一种装载监测方法可以包括监测来自卡车上的轴秤的读数、铣刨表面以产生铣刨的材料、以及将铣刨的材料输送到卡车箱子中。该方法还可以包括当读数达到选定的轴装载时停止铣刨和输送。
12.在一个或多个实施例中,一种铣刨机可以包括由牵引设备支撑的框架、用于铣刨表面并支撑在框架上的铣刨滚筒、以及用于从铣刨滚筒接收铣刨的材料并将铣刨的材料向上输送到释放点的输送机。铣刨机还可以包括经配置扫描卡车箱子的传感器和与传感器通信以与传感器协调的控制器。控制器进一步经配置存储卡车计数并识别卡车箱子何时装满。
附图说明
13.图1是根据一个或多个实施例的路面铣刨项目的示意图。
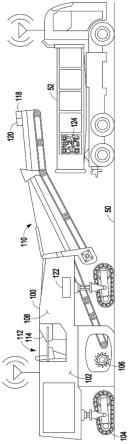
14.图2是根据一个或多个实施例的路面铣刨工地和周围区域的示意图。
15.图3是根据一个或多个实施例的装载卡车的铣刨机的侧视图。
16.图4是根据一个或多个实施例的空自卸卡车的后透视图。
17.图5是根据一个或多个实施例的部分填充的自卸卡车的后透视图。
18.图6是根据一个或多个实施例的满的自卸卡车的后透视图。
19.图7是示出根据一个或多个实施例的核算方法的方法图。
20.图8是示出根据一个或多个实施例的装载监测方法的方法图。
21.图9是示出根据一个或多个实施例的装载监测方法的方法图。
具体实施方式
22.图1是路面铣刨项目的示意图。如图所示,例如,铣刨项目可以包括诸如冷刨机的铣刨机100。冷刨机可以位于铣刨工地处,并且可以操作以从道路表面移除一层或多层道路材料。冷刨机可以利用破碎表面产生粒状材料的旋转设备或铣刨滚筒来移除材料。
23.如图2所示,冷刨机可以包括由一个或多个牵引设备104支撑的框架102、可旋转地支撑在框架102腹部下方的铣刨滚筒106、以及安装到框架102上并经配置驱动铣刨滚筒106和牵引设备104的发动机108。牵引设备104可以包括连接到适于相对于地表面可控地升高和降低框架102的致动器的轮子或履带。框架102的升高和降低还可以用于改变铣刨滚筒106进入表面50的铣刨深度。在一些实施例中,如果需要,相同或不同的致动器也可以用于
使冷刨机100转向和/或调节牵引设备104的行进速度(例如,加速或制动牵引设备104)。输送机系统110可以在前端枢转地连接到框架102上,并且经配置用于将材料从铣刨滚筒106运输离开并且进入运输车辆或卡车52中。
24.框架102还可以支撑操作员站112。操作员站112可以容纳用于控制冷刨机100的任何数量的接口设备114。在所公开的示例中,接口设备114尤其可以包括显示器、警告设备和输入设备。在其它实施例中,操作员站112可以是非车载冷刨机100。例如,操作员站112可以体现为远程控制器,诸如手持控制器,操作员可以使用该远程控制器从工地上的任何地方或远离工地的地方控制冷刨机100。操作员站112可替代地体现为用于计算机的软件程序和用户接口,并且可以包括硬件和软件的组合。在其它实施例中,冷刨机100可以是自主的并且可以不包括操作员站112。
25.显示器可以经配置呈现冷刨机100(例如,铣刨滚筒106)相对于工地特征(例如,表面50的铣刨和/或未铣刨部分)的位置,并且向操作员显示数据和/或其它信息。警告设备可以经配置关于铣刨滚筒106与工地特征的接近度,和/或当某些数据段超过相关联的阈值时,诸如当正在装载的卡车满时,可听地和/或可视地警告冷刨机100的操作员。输入设备可以经配置从冷刨机100的操作员接收数据和/或控制指令。其它接口设备(例如,控制设备)也是可能的,并且如果需要,上述接口设备中的一个或多个可以组合成单个接口设备。
26.输入设备可以是例如经由一个或多个按钮、开关、拨盘、操纵杆等接收控制指令的模拟输入设备。输入设备还可以或可替代地包括数字部件,诸如一个或多个软键、触摸屏和/或视觉显示器。输入设备可以经配置基于从操作员接收的输入产生指示与冷刨机100和/或其周围环境相关联的各种参数的一个或多个信号。
27.输送机系统110可以包括与铣刨滚筒106相邻的第一输送机,其经配置将铣刨材料转移到第二输送机。输送机可以枢转地附接到框架102上,从而可以调节铣刨材料离开输送机的高度。换言之,可以调节输送机在垂直方向上的枢转取向以升高和降低输送机。输送机还可以枢转地附接到框架102上,从而可以调节铣刨材料离开输送机的横向位置。换言之,可以调节输送机在水平方向上的枢转取向以使输送机从一侧移动到另一侧。
28.输送机可以包括皮带,其被支撑在多个滚轮组件上并且由马达驱动。马达例如可以体现为由液压系统(未示出)提供动力的液压马达。在其它实施例中,马达可以是电动马达或其它类型的马达。马达可以由发动机或另一动力源提供动力。
29.输送机可以从铣刨滚筒接收铣刨的材料,并将材料从处理区域向上运送到释放点,在该释放点材料可以被释放以落入例如卡车的箱子中。如图1所示,一个或多个卡车52可以用于将材料拖运离开路面铣刨项目。在一个或多个实施例中,卡车52可以将材料输送到沥青厂54,沥青厂54可以将材料在其沥青制造过程中重新用作集料。在其它实施例中,卡车52可以将材料输送到填埋场或回收设施。在一些实施例中,可以使用多个材料输送位置。在一个或多个实施例中,卡车52可以返回到路面铣刨工地以接收和拖运离开附加的材料。当铣刨机100在操作中时,卡车52的循环可以继续。
30.图3示出了路面铣刨工地116的示意图,诸如图1的整个项目中所示的工地。如图所示,铣刨机100可以是路面铣刨工地116上的相对中心的物体。卡车52可以进入工地116,根据需要等待一转以接收铣刨的材料,接近铣刨机100,接收材料,然后离开铣刨机并离开路面铣刨工地116。
31.在一个或多个实施例中,铣刨机100可以经配置以执行与卡车52的相遇的核算,并且可以进一步经配置以帮助将卡车适当地装载到满载水平。核算可以包括卡车数量的点数或卡车计数,并且还可以包括收集关于卡车的附加信息。适当地装载卡车可以包括建立卡车箱子体积、监测进入卡车箱子的材料流、以及识别卡车箱子何时装满的过程。铣刨机可以包括用于执行上述操作的核算和装载系统。核算和装载系统可以包括卡车传感器118、装载传感器120以及与卡车传感器118和装载传感器120通信的控制器122。应当理解,虽然已经讨论了核算和装载系统,但是卡车计数和装载过程可以由单独的专用系统而不是一个组合系统来执行。
32.如图2所示,卡车传感器118可以设置在铣刨机100上或其附近,并可以经配置用于识别卡车的存在和/或与卡车的相互作用。换言之,卡车传感器118能够将自卸卡车与皮卡车或与可能存在于铣刨工地100上的其它设备、车辆、碎屑或工人区分开。照此,卡车传感器118可以提供关于由铣刨机装载的卡车数量的可靠数据。
33.卡车传感器118可以位于项目工地上的一个或多个位置。在一个或多个实施例中,如图2所示,卡车传感器118可以定位在输送机110的顶端处或附近,从而为传感器提供在项目工地上的升高位置,并为传感器提供接近卡车的适当视图。此外,该位置可以为卡车传感器118提供卡车箱子的视线,从而允许卡车传感器直接评估卡车箱子的尺寸。附加地或可替代地,卡车传感器118可以位于远离铣刨机100的位置,从而为卡车传感器提供更宽的项目工地和设备相互作用的视线。在一个或多个实施例中,卡车传感器可以定位在三脚架上或可移动平台上,使得当铣刨机沿道路行进时卡车传感器可随铣刨机移动。在一个或多个实施例中,卡车传感器可以设置在无人机上,从而为卡车传感器的位置提供高水平的灵活性。还可以提供其它安装位置和/或系统。
34.在一个或多个实施例中,卡车传感器118可以是特征查找设备。换言之,卡车传感器可以与卡车52或其它系统上的识别特征124一起工作以识别和/或识别卡车52。换言之,例如,卡车52可以在卡车52的一个或多个选定表面上包括qr码,诸如涂漆的qr码设计、贴花、磁体、或以其它方式施加的qr码。可替代地或附加地,识别特征124可以包括rfid标签或设备。可替代地或附加地,识别特征124可以包括蓝牙应答器和/或wi-fi应答器。在这些情况下,卡车传感器118可以包括相应的传感器,诸如qr码扫描器、rfid扫描器、蓝牙发射器/接收器和/或wi-fi发射器/接收器。如图3所示,识别特征124可以包括gps应答器,并且卡车传感器118也可以包括gps应答器。地理围栏126可以放置在铣刨机100周围,并且穿过地理围栏的卡车可以被计数和识别。
35.根据用于运输铣刨材料的卡车车队,各种类型的识别特征124中的一个或多个可以存在于车队中的一个或多个卡车52上。照此,多种类型的卡车传感器118可以存在于铣刨机100上,以便具有与具有多种识别特征124的多种卡车52一起工作的灵活性。
36.在一个或多个实施例中,卡车传感器118可以包括单侧设备。换言之,作为特征查找设备的替代或补充,卡车传感器118可以适于识别卡车52或多种卡车52,而无需卡车52上的任何特定识别特征。单侧设备可以包括摄像机、3d或2d扫描器、雷达、激光雷达或其它经配置以用于识别卡车52的存在和/或追踪卡车52的移动而无需卡车自身上的任何特定特征或设备的设备。单侧设备可以由计算机软件支持,该计算机软件适于分析从设备接收的数据(诸如图像数据或点云数据)并评估卡车52是否存在。在一个或多个实施例中,计算机软
件可以包括一系列总体上定义卡车(诸如自卸卡车)的尺寸和形状的度量,例如允许系统识别卡车的存在。在一个或多个实施例中,更详细的度量可以用于识别存在的卡车的特定类型和/或评估卡车的尺寸。
37.在任何上述情况下,卡车传感器118可以连续地或周期性地扫描卡车52的项目工地和/或接近铣刨机100的区域。卡车传感器118可以与控制器有线或无线通信,并且卡车传感器118可以将卡车信息发送到控制器用于处理。应当理解,除了识别各个卡车的存在或与铣刨机的相互作用之外,卡车上的识别特征可以允许捕获关于各个卡车的信息。换言之,例如,qr码、rfid设备、蓝牙应答器、wi-fi应答器或gps应答器可以包含关于卡车的制造和型号信息、卡车箱子尺寸、装载承载能力、轴计数、轴装载、目标装载或关于卡车的其它信息。卡车传感器118也可以将该信息发送到控制器。
38.装载传感器120可以经配置监测铣刨机对卡车52的装载,并且可以允许控制器122识别卡车装载的状态(例如,空的、特定满的水平、满的、边对边加权等)。根据卡车传感器118的性质,装载传感器120可以是卡车传感器118的重要部分。换言之,在卡车传感器118具有允许对卡车进行计数和监测卡车装载的能力的情况下,卡车传感器118和装载传感器120可以是允许执行两种功能的单个传感器。
39.在一个或多个实施例中,装载传感器120可以包括3d扫描器或智能摄像机。装载传感器120可以布置在铣刨机100上的输送机110的顶端处或附近,从而当卡车返回输送机110下方时,为装载传感器120提供卡车箱子56的自上而下视图。装载传感器120可以扫描卡车箱子56以建立可用体积,并且可以连续地或周期性地监测卡车箱子56的填充。换言之,如图4-6所示,装载传感器120可以捕获卡车箱子56的图像,并且可以将图像发送到控制器,以允许确定卡车箱子中的材料的体积。例如,该信息可以用于自动开始装载(例如,当卡车存在且空时),监测装载进程;以及当卡车满时自动停止装载。利用关于被铣刨的道路材料的密度信息,控制器可以进一步确定卡车箱子中的材料的重量。在经由卡车传感器信息可获得卡车容量信息的情况下,控制器因此可以确定特定卡车何时装载到满载并自动停止卡车的装载。应当理解,装载传感器120也可以布置在其它位置,例如,可以布置在与铣刨机100有线或无线通信的无人机上。
40.在其它实施例中,卡车52可以包括装载传感器120。换言之,例如,卡车可以包括布置在卡车驾驶室顶部的3d扫描器或智能摄像机。扫描器或摄像机可以面向后并且可以与铣刨机100上的控制器122无线通信。在其它实施例中,装载传感器120可以是与卡车52上的轴秤通信的传感器或系统。换言之,在装载的卡车配备有轴秤的情况下,装载传感器120可以是蓝牙、wi-fi或与轴秤的其它无线通信,并且可以将该信息发送到控制器122。在其它实施例中,轴秤可以是装载传感器120,并且秤可以与控制器122无线通信。因此,在这些情况中的任一种情况下,控制器122可以装载卡车直到轴秤达到最大装载极限,然后控制器122可以自动停止卡车52的装载。
41.控制器122可以与卡车传感器118和/或装载传感器120一起工作以执行核算操作并监测和/或控制卡车装载。在一个或多个实施例中,控制器122可以包括存储在计算设备的存储器中的计算机实现的指令。计算机实现的指令在被执行时可以执行一种或多种方法,诸如核算方法和/或装载监测方法。在一个或多个实施例中,计算设备可以是专用计算设备,或者计算设备可以是通常存在于铣刨机上用于控制和操作铣刨机的计算设备。
42.工业实用性
43.在操作和使用中,核算和装载系统可以执行一种或多种方法。在一个或多个实施例中,系统可以执行核算方法。(200)该方法可以包括控制器,其监测铣刨机周围区域是否存在卡车。(202)该监测可以包括与卡车传感器协调以识别卡车的存在。在一个或多个实施例中,识别卡车的存在可以包括使用控制器来分析由卡车传感器生成的图像数据或点云数据以确定卡车的存在。在一个或多个其它实施例中,识别卡车的存在可以包括识别卡车上的识别特征,诸如qr码、rfid、蓝牙应答器、wi-fi应答器或gps应答器。在更进一步的实施例中,识别卡车的存在可以包括接收关于卡车穿过地理围栏的信息。在更进一步的实施例中,识别卡车的存在可以包括扫描卡车箱子体积。换言之,在提供3d扫描器或智能摄像机作为装载传感器的情况下,卡车箱子的扫描可以指示卡车存在并与铣刨机相互作用。该方法可以包括例如通过保持点数或卡车计数来执行与铣刨机相互作用的卡车的核算。(204)保持点数或卡车计数可以包括存储与铣刨机相互作用的卡车的数量,并且每当识别到附加的卡车时添加该数量,并且存储新增加的数量。(206)该方法可以在可以同时运行的时间帧范围内执行。例如,该方法可以在一天内、在特定工地的操作时间内、在工作班次期间、在铣刨机的寿命内和/或在操作员可选择的特定时间段内进行。该方法还可以包括将点数发送到后台,用于估计、出价和/或对未来项目计费。
44.该系统还可以执行装载监测的方法。(300)该方法可以包括控制器获得卡车箱子体积。(302)该获得可以包括与装载监测器协调并扫描卡车箱子。例如,可以用3d扫描器或智能摄像机来执行扫描。在一个或多个实施例中,卡车箱子体积可以从卡车上的qr码、rfid或其它包含特征的数据获得。在一个或多个实施例中,例如,装载监测器可以确定卡车上的轴数量,并且控制器可以基于已知的可允许的轴装载来计算装载估计。装载估计可以用于计算基于铣刨材料密度的体积估计。该方法可以包括存储卡车箱子体积或体积估算,为铣刨机操作员显示卡车箱子体积或体积估算,和/或将卡车箱子体积或体积估算发送到卡车或中心站。
45.该方法还可以包括铣刨道路表面或其它表面以产生铣刨材料(304)并将铣刨的材料输送到卡车箱子中(306)。该方法还可以包括使用装载监测器连续地或周期性地重新扫描卡车箱子以获得卡车箱子内的材料体积或水平。(308)该方法还可以包括基于来自装载监测器的图像或数据调节输送机的位置,以更均匀地装载卡车箱子。控制器可以计算材料体积并将材料体积与卡车箱子体积或体积估计进行比较(310),和/或控制器可以显示材料体积,使得操作员可以将材料体积与卡车箱子体积或体积估计进行比较。该方法还可以包括当卡车存在且空(或未满的,诸如当部分满的卡车到达时)时自动开始铣刨和输送操作。该方法还可以包括当材料体积与卡车箱子体积或卡车箱子体积的某一选定百分比相同时自动停止铣刨和输送操作。可替代地或附加地,该方法可以包括当材料体积接近卡车箱子体积并且操作员可以停止铣刨和输送操作时启动警报。
46.在一个或多个实施例中,该方法还可以包括基于铣刨材料的已知密度将材料体积转换成材料重量。在一个或多个实施例中,材料重量可以与卡车的已知重量或装载极限进行比较。在其它实施例中,材料重量可以与多个轴装载极限或其它类型的装载极限进行比较。该方法还可以包括存储装载到卡车上的体积和/或重量和/或存储用于装载卡车的时间量。该方法还可以包括在整个工作班次、一天、一周、一个项目或另一个时间段内累积装载
到多个卡车上的材料的总体积和/或重量。该方法还可以包括将单独的卡车体积/重量、总体积/重量和/或卡车装载时间发送到中心站,用于估计、出价和/或对未来项目计费。
47.在一个或多个实施例中,装载监测的方法(400)可以包括连续地或周期性地监测来自卡车上的轴秤的读数(402)。该方法可以包括铣刨道路表面或其它表面(404)并将铣刨的材料输送到卡车中(406)。该方法还可以包括当来自轴秤的读数达到选定的轴装载时自动停止铣刨和输送操作。(408)该方法还可以包括例如基于轴秤和轴数量以及轴几何形状来计算装载到卡车上的铣刨材料的总重量。该方法还可以包括基于被铣刨材料的密度计算装载到卡车上的被铣刨材料的体积。该方法还可以包括在整个工作班次、一天、一周、一个项目或另一个时间段内累积装载到多个卡车上的材料的总体积和/或重量。该方法还可以包括将单独的卡车体积/重量和/或总体积/重量发送到中心站,用于估计、出价和/或对未来项目计费。
48.上面的具体实施方式是说明性的,而不是限制性的。因此,本发明的范围应参考所附权利要求以及这些权利要求所授权的等同物的全部范围来确定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1