一种高韧性水泥基复合材料铺路机的制作方法
1.本实用新型涉及路面铺设设备技术领域,尤其涉及一种高韧性水泥基复合材料铺路机。
背景技术:
2.水泥基复合材料是指以硅酸盐水泥为基体,以耐碱玻璃纤维、通用合成纤维、各种陶瓷纤维、碳和芳纶等高性能纤维、金属丝以及天然植物纤维和矿物纤维为增强体,加入填料、化学助剂和水经复合工艺构成的复合材料。
3.混凝土是一个多相体,且内部有着微裂缝、孔隙和空洞等先天缺陷。在外荷载的作用下,混凝土内部的微裂缝不断产生、扩展至孔隙、空洞等先天缺陷处,会出现应力集中的现象,这成为混凝土破坏的根源,在力学性能的表现上就是抗拉强度低,因而混凝土中掺加纤维是一项提高其韧性的重要技术措施,其中包括增加以耐碱玻璃纤维通用合成纤维、各种陶瓷纤维、碳和芳纶等高性能纤维、金属丝以及天然植物和旷物纤维为增强体,加入填料、化学助剂和水经复合工艺构成的复合材料。
4.铺路前需要先将铺路的路面固定好两侧的护板,保证铺路的宽度,铺路机需要依靠护板高度来实现铺路的高度调节,需要保证路面与护板齐平;铺路机则将混凝土均摊在路面上;通常采用预先将混凝土倾倒在路面上,由于现有技术中的物料投放不均匀,需要通过铺路机进行摊平;但是长时间静置后容易出现外表面快速凝固的现象,导致铺路的质量下降,造成容易出现路面开裂的现象,并且现有的抹平辊上容易粘附混凝土,并且不具备相应的清除能力,长时间使用容易出现表面残留混凝土,影响抹平效果。
技术实现要素:
5.本实用新型的目的是针对背景技术中存在的问题,提出一种能够均匀下料且方便抹平路面的高韧性水泥基复合材料铺路机。
6.本实用新型的技术方案:一种高韧性水泥基复合材料铺路机,包括行走机架以及通过支撑杆固定的暂存仓,所述暂存仓的下端固定有与暂存仓相连通的下料件,所述下料件的内部转动连接有横向设置的长轴一,所述长轴一外周侧上圆周等距固定有多个分量板,所述长轴一的两端均贯穿下料件且延伸至下料件外侧,所述长轴一的一端固定有齿轮一,所述暂存仓的内部转动连接有横向设置的长轴二,所述长轴二上固定有对称设置的螺旋叶,所述长轴二的两端均贯穿暂存仓的内壁且延伸至暂存仓的两侧,所述长轴二的一端固定有齿轮三,所述行走机架上通过固定架固定有伺服电机,所述伺服电机的输出轴上固定有与齿轮一以及齿轮三啮合传动的齿轮二,所述暂存仓上设置有用于整平路面的整平机构。
7.优选的,所述整平机构包括固定在暂存仓两侧的侧翼板,两个所述侧翼板靠近行走机架的一侧均贯穿设置有与长轴二同轴心设置的短轴,两个所述短轴上均活动套设有臂板,两个所述臂板之间转动连接有抹平辊,所述抹平辊的轴与长轴二的一端通过链轮传动
组件传动连接。
8.优选的,两个所述臂板之间固定有连接板,所述连接板上贯穿设置有两个滑杆,两个所述滑杆的下端共同固定有与抹平辊接触的刮板,所述刮板与连接板之间固定有弹簧。
9.优选的,所述链轮传动组件包括固定在长轴二一端以及固定在抹平辊轴上的链轮,两个所述链轮之间通过链条传动连接。
10.优选的,所述下料件的下侧开设有出料口,所述下料件上固定有用于导料的引流板。
11.优选的,所述行走机架包括与暂存仓通过支撑杆固定的主体架,所述主体架的下侧设置有两个行走轴,两个所述行走轴上均通过轴承转动连接有两个与主体架固定的侧轴板,每个所述行走轴的两端均固定有行走轮,其中一个所述行走轴上固定有从动齿轮,所述主体架上通过安装板固定有减速电机,所述减速电机的输出轴上固定有与从动齿轮啮合传动的主动齿轮。
12.与现有技术相比,本实用新型具有如下有益的技术效果:
13.通过下料件、长轴一和分量板的配合使用,通过伺服电机的均速转动作用配合多个部件实现将暂存仓内的物料稳定从下料件的出料口排出,进而实现均匀下料;
14.并且暂存仓内设置的长轴二和对称设置的螺旋叶能够将暂存仓的物料达到均匀混合的目的,防止物料凝结;
15.通过增加整平机构的使用,可将排出的物料通过抹平辊稳定整平,并且可活动转动的臂板可实现适用不同路面高度的施工,并且增加了刮板将抹平辊表面刮除粘结物,保证整平效果。
附图说明
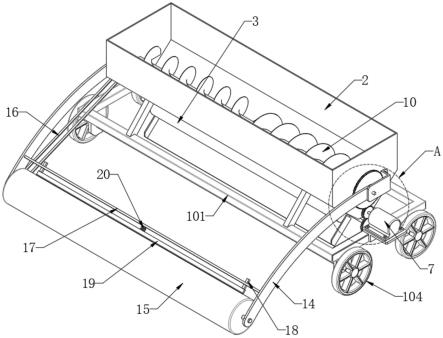
16.图1给出本实用新型一种实施例的结构示意图;
17.图2为图1的a处放大结构示意图;
18.图3为图1的正视图;
19.图4位图3中b-b方向的剖视图。
20.附图标记:
21.1、行走机架;101、主体架;102、侧轴板;103、行走轴;104、行走轮;105、从动齿轮;106、减速电机;107、主动齿轮;
22.2、暂存仓;3、下料件;4、长轴一;5、分量板;6、齿轮一;7、伺服电机;8、齿轮二;9、长轴二;10、螺旋叶;11、齿轮三;12、侧翼板;13、短轴;14、臂板;15、抹平辊;16、链轮传动组件;17、连接板;18、滑杆;19、刮板;20、弹簧。
具体实施方式
23.下文结合附图和具体实施例对本实用新型的技术方案做进一步说明。
24.实施例一
25.如图1-4所示,本实用新型提出的一种高韧性水泥基复合材料铺路机,包括行走机架1以及通过支撑杆固定的暂存仓2,行走机架1包括与暂存仓2通过支撑杆固定的主体架101,主体架101的下侧设置有两个行走轴103,两个行走轴103上均通过轴承转动连接有两
个与主体架101固定的侧轴板102,每个行走轴103的两端均固定有行走轮104,其中一个行走轴103上固定有从动齿轮105,主体架101上通过安装板固定有减速电机106,减速电机106与外部控制开关以及外部电源电连接。减速电机106的输出轴上固定有与从动齿轮105啮合传动的主动齿轮107。
26.暂存仓2的下端固定有与暂存仓2相连通的下料件3,下料件3的内部转动连接有横向设置的长轴一4,长轴一4外周侧上圆周等距固定有多个分量板5,本实施例中分量板5的数量为8个,分量板5的端部与下料件3的内周壁相靠近,分量板5的两端均与下料件3的端部内壁相靠近。长轴一4的两端均贯穿下料件3且延伸至下料件3外侧,下料件3的下侧开设有出料口,下料件3上固定有用于导料的引流板。长轴一4的一端固定有齿轮一6,暂存仓2的内部转动连接有横向设置的长轴二9,长轴二9上固定有对称设置的螺旋叶10,长轴二9的两端均贯穿暂存仓2的内壁且延伸至暂存仓2的两侧,长轴二9的一端固定有齿轮三11,行走机架1上通过固定架固定有伺服电机7,伺服电机7与外部控制开关以及外部电源电连接。伺服电机7的输出轴上固定有与齿轮一6以及齿轮三11啮合传动的齿轮二8,暂存仓2上设置有用于整平路面的整平机构;整平机构包括固定在暂存仓2两侧的侧翼板12,两个侧翼板12靠近行走机架1的一侧均贯穿设置有与长轴二9同轴心设置的短轴13,两个短轴13上均活动套设有臂板14,两个臂板14之间转动连接有抹平辊15,抹平辊15的轴与长轴二9的一端通过链轮传动组件16传动连接,链轮传动组件16包括固定在长轴二9一端以及固定在抹平辊15轴上的链轮,两个链轮之间通过链条传动连接。
27.本实施例中,将设备移动至施工路面指定位置上,并且架设在护板上,抹平辊15放置在施工路面的侧边护板上,行走轮104位于护板的两侧;在进行铺路工作时,先将带有高韧性水泥基复合材料的混凝土投放在暂存仓2内,将减速电机106启动,减速电机106的输出轴带动主动齿轮107与行走轴103上的从动齿轮105转动,进而行走轴103上的行走轮104转动,实现移动,并且通过外部控制开关进行控制转速实现调控移动速度;并且进行工作时,将伺服电机7接通电源,伺服电机7的输出轴带动齿轮二8与齿轮一6和齿轮三11啮合传动,进而长轴二9通过齿轮三11带动,并且长轴二9上的螺旋叶10可保持暂存仓2内的混凝土保持混合均匀状态,避免凝结;齿轮一6将带动长轴一4转动,长轴一4上的分量板5可将混凝土均速地通过下料件3上的出料口排出,并且通过引流板落在施工路面上,然后在行走机架1移动过程中,臂板14上转动连接的抹平辊15将通过链轮传动组件16的传动作用转动,可对下料后的混凝土路面进行抹平。
28.实施例二
29.如图4所示,本实用新型提出的一种高韧性水泥基复合材料铺路机,基于实施例一,本实施例还包括:两个臂板14之间固定有连接板17,连接板17上贯穿设置有两个滑杆18,两个滑杆18的下端共同固定有与抹平辊15接触的刮板19,刮板19与连接板17之间固定有弹簧20。
30.本实施例中,在抹平辊15转动的过程中,刮板19与抹平辊15表面接触,并且通过弹簧20的弹力作用保证刮板19与抹平辊15的接触性,并且将可抹平辊15表面的凝结混凝土刮除,达到保证抹平辊15抹平效果的目的。
31.上述具体实施例仅仅是本实用新型的几种优选的实施例,基于本实用新型的技术方案和上述实施例的相关启示,本领域技术人员可以对上述具体实施例做出多种替代性的
改进和组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1