一种便于清理的公路施工抹平装置的制作方法
1.本实用新型涉及公路施工技术领域,具体涉及一种便于清理的公路施工抹平装置。
背景技术:
2.公路工程是指公路构造物的勘察、测量、设计、施工、养护、管理等工作,公路工程构造物包括:路基、路面、桥梁、涵洞、隧道、排水系统、安全防护设施、绿化和交通监控设施,以及施工、养护和监控使用的房屋、车间和其他服务性设施,在道路施工时需要保证道路的平整,就需要用到抹平装置对道路上的混凝土进行抹平,在抹平装置进行使用时底部的抹平盘会与道路上的混凝土接触,但现有的抹平装置的施工范围比较局限,在对大面积的道路进行抹平作业施工中,由于抹平装置的施工范围比较局限,导致作业的时间较长,从而导致工作效率较低,并且现有的抹平装置中的刮板无法对道路表面施加一定的压力,从而导致抹平的效果较差;
3.综上所述,现有的抹平装置中的刮板无法对道路表面施加一定的压力,从而导致抹平的效果较差,并且抹平装置的施工范围比较局限,导致工作效果较差的问题。
技术实现要素:
4.本实用新型为解决现有的抹平装置中的刮板无法对道路表面施加一定的压力,从而导致抹平的效果较差,并且抹平装置的施工范围比较局限,导致工作效果较差的问题,而提出一种便于清理的公路施工抹平装置。
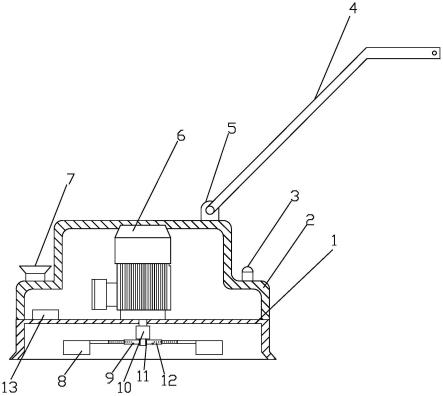
5.本实用新型的一种便于清理的公路施工抹平装置,其组成包括圆形底框1、上壳体2、警示灯3、手推杆4、铰接座5、电机6、报警器7、刮板8、测距传感器9、气缸10、固定环11和伸缩杆12;
6.圆形底框1为上端封闭下端开口的圆柱体状,圆形底框1的上表面中央处设有电机6,且电机6的输出端穿过圆形底框1的封闭端面之后,与气缸10的顶部固定连接,气缸10的伸缩杆上套设有固定环11,且固定环11的内壁与气缸10的伸缩杆的外表面焊接固定,固定环11的外表面沿圆周方向均匀的设有n个伸缩杆12,n为正整数,每个伸缩杆12的端面上设有刮板8,且每个伸缩杆12的外表面上设有一个测距传感器9,圆形底框1上设有上壳体2,上壳体2的截面为“凸”字型,上壳体2环形台肩的上表面沿圆周方向均匀的设有一个警示灯3和一个报警器7,上壳体2的顶面一端设有铰接座5,且手推杆4的底端与铰接座5铰连接;
7.进一步的,所述的伸缩杆12为带有弹簧销自锁式伸缩杆;
8.进一步的,所述的伸缩杆12的可伸缩的长度范围为0.5m~2m,伸缩杆12的数量n,2≤n≤4;
9.进一步的,所述的电机6设置在上壳体2的空腔内部;
10.进一步的,所述的上壳体2空腔顶面设有圆形凹槽;
11.进一步的,所述的电机6的顶端插入到上壳体2空腔顶面的圆形凹槽的内部;
12.进一步的,所述的圆形底框1的上表面一端设有控制器13;
13.进一步的,所述的测距传感器9的距离信号输出端与控制器13的距离信号输入端连接,控制器13的报警信号输出端与报警器7连接,控制器13的灯光信号输出端与警示灯3,控制器13的复位信号与气缸10连接;
14.进一步的,所述的伸缩杆12的尾端与固定环11的外表面焊接固定;
15.进一步的,所述的刮板8的厚度为15mm~30mm;
16.进一步的,所述的上壳体2底部通过螺栓与圆形底框1的上表面固定连接;
17.进一步的,在使用时,根据实际的作业面积,对该装置中的伸缩杆12的长度进行调节,当作业面积较大时,可将伸缩杆的长度调长;当作业面积较小时,可对伸缩杆12的长度调短;从而可以适用于不同面积的作业地面,进而可以大大的提高工作效率;对伸缩杆12的长度调节完毕后,根据实际的施工要求,启动气缸10,气缸10的伸缩杆伸出,并带动伸缩杆12竖直向下运动,从而使刮板8对施工地面施加一个竖直向下的力;利用测距传感器9对伸缩杆12外表面与地面之间的距离进行实施的监测,当测距传感器9监测到的距离小于最低设置距离时,测距传感器9的距离信号传递给控制器13,控制器13将报警信号传递给报警器7,再将灯光信号传递给警示灯3,从而使报警器7发出示警声音,并且使警示灯3亮起,从起到示警的作用,此时控制器13将复位信号传递给气缸10,使气缸进行复位,从而保证施工地面混凝土厚度的设计值;最后启动电机6,电机6带动气缸10转动,气缸10再带动多个伸缩杆12上的刮板8转动,并且操作人员可以通过手推杆4对该装置进行多方位的移动,从而可以快速的完成抹平作业;此种结构的抹平装置中刮板8对作业地面上的混凝土施加一个竖直向下的力,再结合电机6带动刮板8做圆周运动,进而可以大大的提高抹平的效果,既达到设计要求。
18.本实用新型与现有技术相比具有以下有益效果:
19.本实用新型克服了现有技术的缺点,根据实际的作业面积,对该装置中的伸缩杆的长度进行调节,当作业面积较大时,可将伸缩杆的长度调长;当作业面积较小时,可对伸缩杆的长度调短;从而可以适用于不同面积的作业地面,进而可以大大的提高工作效率;对伸缩杆的长度调节完毕后,根据实际的施工要求,启动气缸,气缸的伸缩杆伸出,并带动伸缩杆竖直向下运动,从而使刮板对施工地面上的混凝土施加一个竖直向下的力;再启动电机,电机带动气缸转动,气缸再带动多个伸缩杆上的刮板做圆周运动,并且操作人员可以通过手推杆对该装置进行多方位的移动,从而可以快速的完成抹平作业;此种结构中的刮板对作业地面上的混凝土施加一个竖直向下的力,再结合电机带动刮板做圆周运动,进而可以大大的提高抹平的效果,既达到设计要求。
附图说明
20.图1是本实用新型所述的一种便于清理的公路施工抹平装置的主剖视图;
21.图2是本实用新型所述的一种便于清理的公路施工抹平装置中刮板、测距传感器、固定环和伸缩杆连接的示意图。
具体实施方式
22.具体实施方式一:结合图1和图2说明本实施方式,本实施方式所述的一种便于清
理的公路施工抹平装置,其组成包括圆形底框1、上壳体2、警示灯3、手推杆4、铰接座5、电机6、报警器7、刮板8、测距传感器9、气缸10、固定环11和伸缩杆12;
23.圆形底框1为上端封闭下端开口的圆柱体状,圆形底框1的上表面中央处设有电机6,且电机6的输出端穿过圆形底框1的封闭端面之后,与气缸10的顶部固定连接,气缸10的伸缩杆上套设有固定环11,且固定环11的内壁与气缸10的伸缩杆的外表面焊接固定,固定环11的外表面沿圆周方向均匀的设有n个伸缩杆12,n为正整数,每个伸缩杆12的端面上设有刮板8,且每个伸缩杆12的外表面上设有一个测距传感器9,圆形底框1上设有上壳体2,上壳体2的截面为“凸”字型,上壳体2环形台肩的上表面沿圆周方向均匀的设有一个警示灯3和一个报警器7,上壳体2的顶面一端设有铰接座5,且手推杆4的底端与铰接座5铰连接;
24.本具体实施方式,在使用时,根据实际的作业面积,对该装置中的伸缩杆12的长度进行调节,当作业面积较大时,可将伸缩杆的长度调长;当作业面积较小时,可对伸缩杆12的长度调短;从而可以适用于不同面积的作业地面,进而可以大大的提高工作效率;对伸缩杆12的长度调节完毕后,根据实际的施工要求,启动气缸10,气缸10的伸缩杆伸出,并带动伸缩杆12竖直向下运动,从而使刮板8对施工地面施加一个竖直向下的力;利用测距传感器9对伸缩杆12外表面与地面之间的距离进行实施的监测,当测距传感器9监测到的距离小于最低设置距离时,测距传感器9的距离信号传递给控制器13,控制器13将报警信号传递给报警器7,再将灯光信号传递给警示灯3,从而使报警器7发出示警声音,并且使警示灯3亮起,从起到示警的作用,此时控制器13将复位信号传递给气缸10,使气缸进行复位,从而保证施工地面混凝土厚度的设计值;最后启动电机6,电机6带动气缸10转动,气缸10再带动多个伸缩杆12上的刮板8转动,并且操作人员可以通过手推杆4对该装置进行多方位的移动,从而可以快速的完成抹平作业;此种结构的抹平装置中刮板8对作业地面上的混凝土施加一个竖直向下的力,再结合电机6带动刮板8做圆周运动,进而可以大大的提高抹平的效果,既达到设计要求。
25.具体实施方式二:结合图1说明本实施方式,本实施方式是对具体实施方式一所述的抹平装置的进一步的限定,本实施方式所述的一种便于清理的公路施工抹平装置,所述的伸缩杆12为带有弹簧销自锁式伸缩杆。
26.具体实施方式三:结合图1说明本实施方式,本实施方式是对具体实施方式二所述的抹平装置的进一步的限定,本实施方式所述的一种便于清理的公路施工抹平装置,所述的伸缩杆12的可伸缩的长度范围为0.5m~2m,伸缩杆12的数量n,2≤n≤4。
27.具体实施方式四:结合图1说明本实施方式,本实施方式是对具体实施方式一所述的抹平装置的进一步的限定,本实施方式所述的一种便于清理的公路施工抹平装置,所述的电机6设置在上壳体2的空腔内部。
28.具体实施方式五:结合图1说明本实施方式,本实施方式是对具体实施方式一所述的抹平装置的进一步的限定,本实施方式所述的一种便于清理的公路施工抹平装置,所述的上壳体2空腔顶面设有圆形凹槽。
29.具体实施方式六:结合图1说明本实施方式,本实施方式是对具体实施方式五所述的抹平装置的进一步的限定,本实施方式所述的一种便于清理的公路施工抹平装置,所述的电机6的顶端插入到上壳体2空腔顶面的圆形凹槽的内部;
30.本具体实施方式,采用电机6的顶端插入到上壳体2空腔顶面的圆形凹槽的内部,
对电机6的顶部起到了固定限位的作用,并且电机6的底部通过电机座与圆形底框1的上表面固定连接,从而提高了该装置在使用状态下的稳定性。
31.具体实施方式七:结合图1说明本实施方式,本实施方式是对具体实施方式一所述的抹平装置的进一步的限定,本实施方式所述的一种便于清理的公路施工抹平装置,所述的圆形底框1的上表面一端设有控制器13。
32.具体实施方式八:结合图1说明本实施方式,本实施方式是对具体实施方式七所述的抹平装置的进一步的限定,本实施方式所述的一种便于清理的公路施工抹平装置,所述的测距传感器9的距离信号输出端与控制器13的距离信号输入端连接,控制器13的报警信号输出端与报警器7连接,控制器13的灯光信号输出端与警示灯3,控制器13的复位信号与气缸10连接;
33.本具体实施方式,如此设置,在使用时利用测距传感器9对伸缩杆12外表面与地面之间的距离进行实施的监测,当测距传感器9监测到的距离小于最低设置距离时,测距传感器9的距离信号传递给控制器13,控制器13将报警信号传递给报警器7,再将灯光信号传递给警示灯3,从而使报警器7发出示警声音,并且使警示灯3亮起,从起到示警的作用,此时控制器13将复位信号传递给气缸10,使气缸进行复位,从而保证施工地面混凝土厚度的设计值。
34.具体实施方式九:结合图1和图2说明本实施方式,本实施方式是对具体实施方式一所述的抹平装置的进一步的限定,本实施方式所述的一种便于清理的公路施工抹平装置,所述的伸缩杆12的尾端与固定环11的外表面焊接固定;
35.本具体实施方式,采用伸缩杆12的尾端与固定环11的外表面焊接固定,提高该装置在使用时的稳定性。
36.具体实施方式十:结合图1说明本实施方式,本实施方式是对具体实施方式一所述的抹平装置的进一步的限定,本实施方式所述的一种便于清理的公路施工抹平装置,所述的刮板8的厚度为15mm~30mm。
37.具体实施方式十一:结合图1说明本实施方式,本实施方式是对具体实施方式一所述的抹平装置的进一步的限定,本实施方式所述的一种便于清理的公路施工抹平装置,所述的上壳体2底部通过螺栓与圆形底框1的上表面固定连接;
38.本具体实施方式,采用上壳体2底部通过螺栓与圆形底框1的上表面固定连接,便于拆卸,进而便于维修与清理。
39.具体实施方式十二:结合图1说明本实施方式,本实施方式是对具体实施方式八所述的抹平装置的进一步的限定,本实施方式所述的一种便于清理的公路施工抹平装置,所述的控制器13采用微型西门子plc控制器。
40.工作原理
41.在使用时,根据实际的作业面积,对该装置中的伸缩杆12的长度进行调节,当作业面积较大时,可将伸缩杆的长度调长;当作业面积较小时,可对伸缩杆12的长度调短;从而可以适用于不同面积的作业地面,进而可以大大的提高工作效率;对伸缩杆12的长度调节完毕后,根据实际的施工要求,启动气缸10,气缸10的伸缩杆伸出,并带动伸缩杆12竖直向下运动,从而使刮板8对施工地面施加一个竖直向下的力;利用测距传感器9对伸缩杆12外表面与地面之间的距离进行实施的监测,当测距传感器9监测到的距离小于最低设置距离
时,测距传感器9的距离信号传递给控制器13,控制器13将报警信号传递给报警器7,再将灯光信号传递给警示灯3,从而使报警器7发出示警声音,并且使警示灯3亮起,从起到示警的作用,此时控制器13将复位信号传递给气缸10,使气缸进行复位,从而保证施工地面混凝土厚度的设计值;最后启动电机6,电机6带动气缸10转动,气缸10再带动多个伸缩杆12上的刮板8转动,并且操作人员可以通过手推杆4对该装置进行多方位的移动,从而可以快速的完成抹平作业;此种结构的抹平装置中刮板8对作业地面上的混凝土施加一个竖直向下的力,再结合电机6带动刮板8做圆周运动,进而可以大大的提高抹平的效果,既达到设计要求。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1