一种绿地垃圾智能清理机器人及垃圾清理方法
本发明涉及垃圾清理装置,尤其涉及一种绿地垃圾智能清理机器人。
背景技术:
1、随着休闲方式的变化,越来越多人喜欢在闲暇时间到公共绿地歇息、露营等户外活动,伴随而来是垃圾的数量和种类的不断增加。因此需要对绿地垃圾进行及时清理,以免滋生蚊虫,污染环境。
2、传统对于绿地垃圾清洁主要依赖清洁人员进行人工清扫,人工清扫的优点是可利用扫把、夹子等清理工具分别对树叶、纸巾、烟头、易拉罐及玻璃瓶等不同种类的绿地垃圾进行清扫,但人工清扫存在劳动强度大、清扫效率低等缺点。为此,近年出现了驾驶式垃圾清扫车,清洁人员可驾驶这种垃圾清扫车,对绿地上的树叶、纸巾、烟头等体积及重量较小的垃圾进行清理,减轻了清洁人员的劳动强度。但现有的驾驶式垃圾清扫车难以对易拉罐、玻璃瓶等体积及重量较大的固体垃圾进行清理,当遇到这些体积及重量较大的固体垃圾时,仍需要清洗人员进行清扫,清扫效率仍然较低,而且需要清洁人员的驾驶进行清扫,无法实现24小时作业。
技术实现思路
1、本发明的目的在于提出一种绿地垃圾智能清理机器人及垃圾清理方法。
2、为达此目的,本发明采用以下技术方案:
3、一种绿地垃圾智能清理机器人,包括车体以及设在所述车体上的摄像头单元、动力单元、第一清扫组件和第二清扫组件;
4、所述第一清扫组件包括第一垃圾仓和吸入机构,所述吸入机构的排出端与所述第一垃圾仓连通,所述吸入机构的吸入端延伸至所述车体的下方;
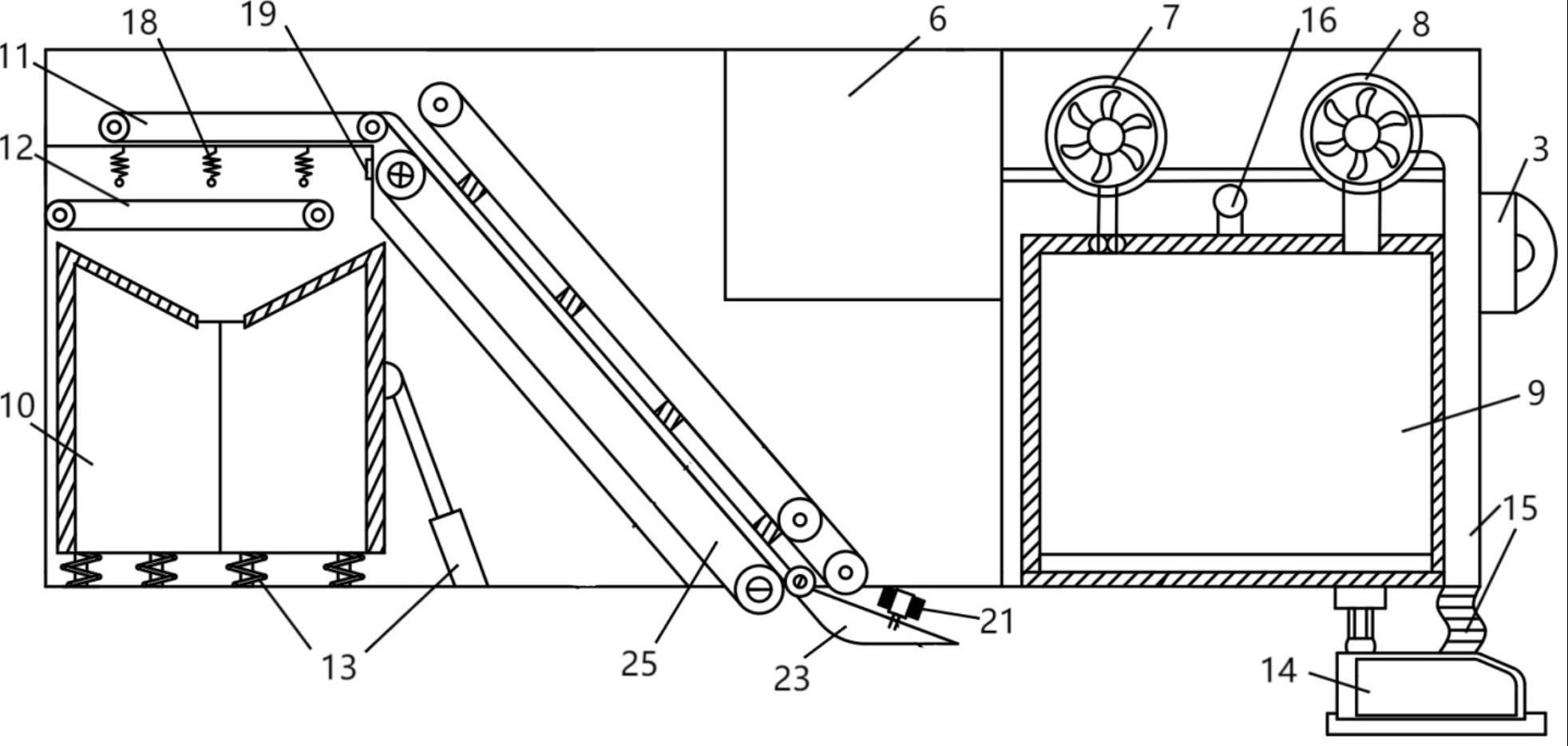
5、所述第二清扫组件包括第二垃圾仓、升降机构、清扫斗和分类部件,所述清扫斗设在所述升降机构的升降端,所述升降机构的底端延伸至所述车体的下方,所述清扫斗上设有清扫毛刷,所述清扫毛刷用于将地面上的垃圾物扫至所述清扫斗上,所述升降机构用于带动清扫斗活动至所述第二垃圾仓的上方,所述第二垃圾仓内设有多个收集腔,所述分类部件用于判断清扫斗内的垃圾类型,并根据判断的垃圾类型将清扫斗内的垃圾投入到相应的所述收集腔中;
6、所述动力单元用于带动车体沿着预设的路径行驶;所述摄像头单元用于获取车体前进路径上的地面图像,用于根据该地面图像分析车体前进路径上是否存在垃圾物,用于判断该垃圾物的类型。
7、优选的,所述第二垃圾仓的开口部设有多个落料阀门,所述落料阀门设在所述收集腔的上方,所述第二垃圾仓的开口部设有向内倾斜的斜面。
8、优选的,所述分类部件包括第一传送带、第二传送带、多个撞击球和声音采集模块,所述第一传送带的始端与所述升降机构的末端相接,所述第二传送带水平设置在所述第一传送带的下方,所述第二传送带的始端突出于所述第一传送带的末端,多个所述撞击球沿所述第二传送带的输送方向通过弹簧固定在所述第二传送带的上方,所述第二传送带的末端与所述第二垃圾仓的开口部上下相对,所述声音采集模块设在所述第二传送带的末端,所述声音采集模块用于采集重垃圾与所述撞击球撞击的声音。
9、优选的,所述第二清扫组件还包括振荡部件,所述第二垃圾仓设在所述振荡部件的活动端。
10、优选的,所述第一清扫组件还包括第一真空部件、自动套袋器和重量计,所述第一垃圾仓的上方联接所述重量计,所述自动套袋器设在所述第一垃圾仓上,所述自动套袋器用于对所述第一垃圾仓套上真空包装袋,所述第一真空部件用于对第一垃圾仓上的真空包装袋抽气。
11、优选的,所述吸入机构包括真空管道、第二真空部件和吸入罩,所述吸入罩升降设置在所述车体的底部,所述吸入罩与所述第二真空部件的吸入端通过所述真空管道连通,所述第二真空部件的排出端与所述第一垃圾仓连通。
12、优选的,还包括照明组件、太阳能板和储能组件,所述太阳能板设在所述车体的顶部,所述太阳能板的输出端与所述储能组件的输入端电连接,所述储能组件设在所述车体内,所述照明组件设在所述车体的前端。
13、本发明还提供一种绿地垃圾智能清理机器人的垃圾清理方法,该方法包括以下步骤,
14、步骤s100:设定清扫路径;
15、步骤s200:动力单元带动车体沿着预设的路径行驶,同时摄像头单元获取车体前进路径上的地面图像,并根据该地面图像分析车体前进路径上是否存在垃圾物,若无垃圾物,车体继续沿着预设的路径行驶,若存在垃圾物,车体则行驶至垃圾物处,并执行步骤s300;
16、步骤s300:根据该地面图像判断垃圾物的类型,若该垃圾物的类型为轻垃圾,吸入机构下降并将轻垃圾吸入至第一垃圾仓中;
17、若该垃圾物的类型为重垃圾,则通过清扫毛刷将重垃圾扫入清扫斗,并在升降机构带动下将清扫斗内的重垃圾输送至第二垃圾仓中;
18、步骤s400:重复步骤s200-s300,直到完成整个清扫路径的清扫。
19、优选的,步骤s300中,若垃圾物的类型为重垃圾时,通过分类部件判断该重垃圾的材质,并根据判断的垃圾材质将清扫斗内的垃圾投入到第二垃圾仓内相应的收集腔中。
20、优选的,步骤s400中,判断第一垃圾仓是否已装满,若第一垃圾仓未装满,继续沿预设路径进行清扫,若第一垃圾仓已装满,则对垃圾打包并运送到垃圾站。
21、本发明的有益效果为:通过摄像头单元对垃圾物所在的位置及垃圾的类型进行识别,使得车体在行驶巡检过程中不开启清扫功能,而在到达垃圾物所在的清扫区域时能根据垃圾物的类型选择采用吸入机构或清扫斗进行清扫,由此实现自动对垃圾的识别和清扫,提高了清扫效率。
技术特征:
1.一种绿地垃圾智能清理机器人,其特征在于,包括车体以及设在所述车体上的摄像头单元、动力单元、第一清扫组件和第二清扫组件;
2.根据权利要求1所述的一种绿地垃圾智能清理机器人,其特征在于,所述第二垃圾仓的开口部设有多个落料阀门,所述落料阀门设在所述收集腔的上方,所述第二垃圾仓的开口部设有向内倾斜的斜面。
3.根据权利要求2所述的一种绿地垃圾智能清理机器人,其特征在于,所述分类部件包括第一传送带、第二传送带、多个撞击球和声音采集模块,所述第一传送带的始端与所述升降机构的末端相接,所述第二传送带水平设置在所述第一传送带的下方,所述第二传送带的始端突出于所述第一传送带的末端,多个所述撞击球沿所述第二传送带的输送方向通过弹簧固定在所述第二传送带的上方,所述第二传送带的末端与所述第二垃圾仓的开口部上下相对,所述声音采集模块设在所述第二传送带的末端,所述声音采集模块用于采集重垃圾与所述撞击球撞击的声音。
4.根据权利要求2所述的一种绿地垃圾智能清理机器人,其特征在于,所述第二清扫组件还包括振荡部件,所述第二垃圾仓设在所述振荡部件的活动端。
5.根据权利要求1所述的一种绿地垃圾智能清理机器人,其特征在于,所述第一清扫组件还包括第一真空部件、自动套袋器和重量计,所述第一垃圾仓的上方联接所述重量计,所述自动套袋器设在所述第一垃圾仓上,所述自动套袋器用于对所述第一垃圾仓套上真空包装袋,所述第一真空部件用于对第一垃圾仓上的真空包装袋抽气。
6.根据权利要求5所述的一种绿地垃圾智能清理机器人,其特征在于,所述吸入机构包括真空管道、第二真空部件和吸入罩,所述吸入罩升降设置在所述车体的底部,所述吸入罩与所述第二真空部件的吸入端通过所述真空管道连通,所述第二真空部件的排出端与所述第一垃圾仓连通。
7.根据权利要求1所述的一种绿地垃圾智能清理机器人,其特征在于,还包括照明组件、太阳能板和储能组件,所述太阳能板设在所述车体的顶部,所述太阳能板的输出端与所述储能组件的输入端电连接,所述储能组件设在所述车体内,所述照明组件设在所述车体的前端。
8.一种绿地垃圾智能清理机器人的垃圾清理方法,其特征在于,使用如权利要求1-7任一项所述的绿地垃圾智能清理机器人,该方法包括以下步骤,
9.根据权利要求8所述的一种绿地垃圾智能清理机器人的垃圾清理方法,其特征在于,步骤s300中,若垃圾物的类型为重垃圾时,通过分类部件判断该重垃圾的材质,并根据判断的垃圾材质将清扫斗内的垃圾投入到第二垃圾仓内相应的收集腔中。
10.根据权利要求8所述的一种绿地垃圾智能清理机器人的垃圾清理方法,其特征在于,步骤s400中,判断第一垃圾仓是否已装满,若第一垃圾仓未装满,继续沿预设路径进行清扫,若第一垃圾仓已装满,则对垃圾打包并运送到垃圾站。
技术总结
本发明公开了一种绿地垃圾智能清理机器人及垃圾清理方法,包括车体以及设在车体上的摄像头单元、动力单元、第一清扫组件和第二清扫组件;第一清扫组件包括第一垃圾仓和吸入机构,吸入机构的排出端与第一垃圾仓连通,吸入机构的吸入端延伸至车体的下方;第二清扫组件包括第二垃圾仓、升降机构、清扫斗和分类部件,清扫斗设在升降机构的升降端,清扫斗上设有清扫毛刷。通过摄像头单元对垃圾物所在的位置及垃圾的类型进行识别,使得车体在到达垃圾物所在的清扫区域时能根据垃圾物的类型选择采用吸入机构或清扫斗进行清扫,并通过对重垃圾与撞击球撞击产生的声音进行采集来对重垃圾材质的识别,由此实现自动对垃圾的识别和清扫。
技术研发人员:傅兴杰,林景亮,何伟彬,韩竹成,邹丰泽
受保护的技术使用者:广东海洋大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!