自移动设备的清扫控制方法、装置、电子设备和存储介质与流程
本申请属于智能控制,尤其涉及一种自移动设备的清扫控制方法、装置、电子设备和存储介质。
背景技术:
1、室外扫地车等智能设备具有自主定位导航能力,可在室外商业场所、学校、园区、景区、社区、道路等室外环境中对垃圾进行清扫。然而,室外环境相较于室内环境更加复杂,例如纸屑、落叶等垃圾会藏匿于道路平面与路边石围合形成的角落,在这些角落内的垃圾难以被常规的毛刷、吸盘有效地清扫,导致清扫效果较差。
技术实现思路
1、本申请实施例提供一种自移动设备的清扫控制方法、装置、电子设备和可读存储介质,可以解决相关技术中自移动设备的清扫效果较差的问题。
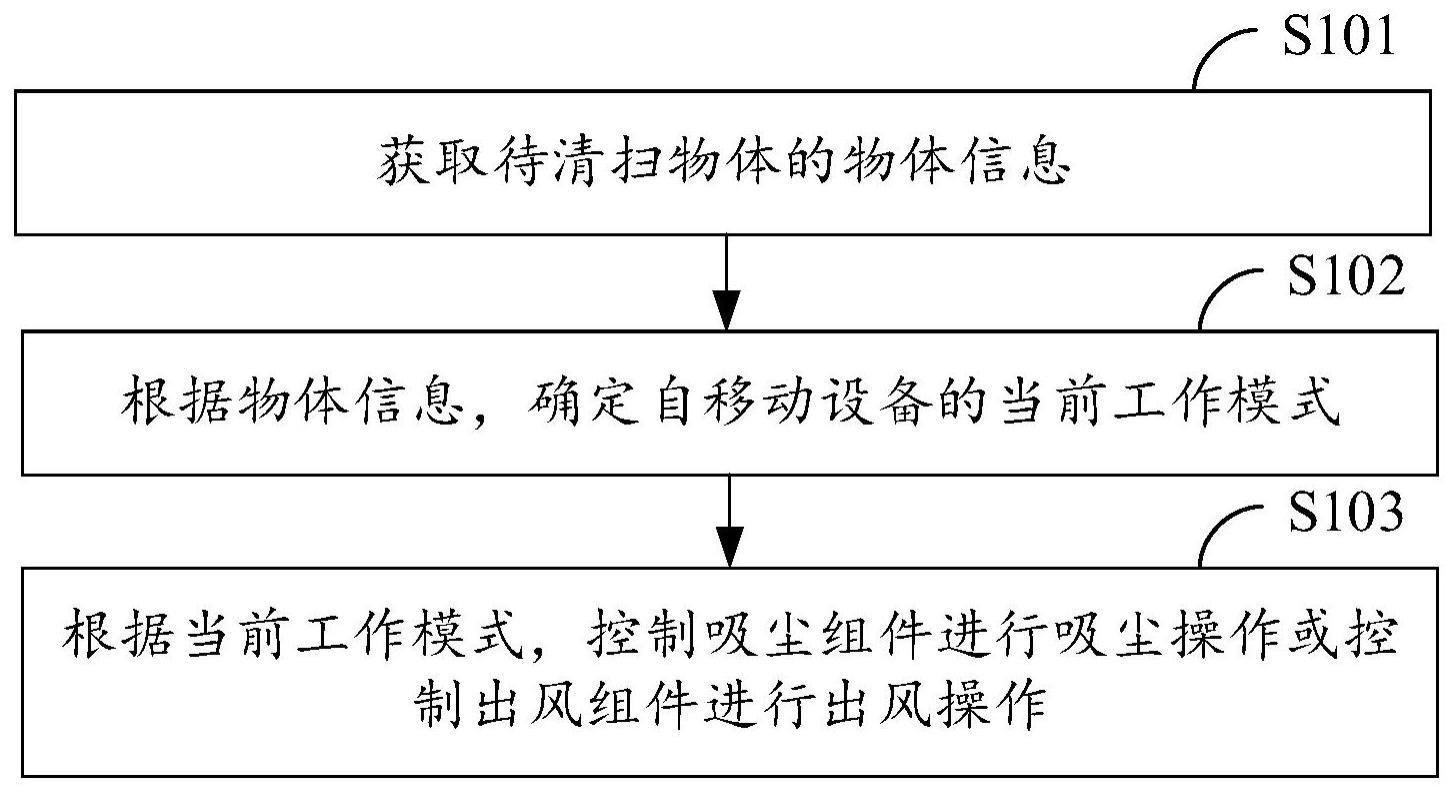
2、本申请实施例第一方面提供一种自移动设备的清扫控制方法,所述自移动设备配置有悬臂式探头,所述悬臂式探头集成有吸尘组件和出风组件,所述清扫控制方法包括:获取待清扫物体的物体信息;根据所述物体信息,确定所述自移动设备的当前工作模式;根据所述当前工作模式,控制所述吸尘组件进行吸尘操作或控制所述出风组件进行出风操作。
3、在本申请的一些实施方式中,所述自移动设备配置有滚刷,所述滚刷为中空设计;在控制所述出风组件进行出风操作时,所述清扫控制方法还包括:控制所述滚刷滚动,以在所述滚刷下方形成第一低压区域,所述第一低压区域用于和所述出风组件出风形成的高压区域产生流向所述第一低压区域的气流。
4、在本申请的一些实施方式中,所述悬臂式探头为中空结构,所述出风组件包括设置于悬臂式探头一端的出风口、设置于所述悬臂式探头外延的导流腔,以及在所述导流腔远离所述悬臂式探头一端的进风口;在控制所述出风组件进行出风操作之前,所述清扫控制方法还包括:控制所述导流腔的进风口移动至所述滚刷和所述出风口之间,以在所述滚刷和所述出风口之间形成第二低压区域,所述第二低压区域用于和所述高压区域产生流向所述第二低压区域的气流,以及和所述第一低压区域产生流向所述第一低压区域的气流。
5、在本申请的一些实施方式中,所述物体信息包括所述待清扫物体的物体类型和物体尺寸;所述根据所述物体信息,确定所述自移动设备的当前工作模式,包括:若所述物体尺寸小于所述悬臂式探头的中空腔体尺寸,且所述物体类型为预设类型,则确定所述当前工作模式为吸尘模式,其中,所述预设类型表征所述待清扫物体的表面为柔性,所述吸尘模式用于指示所述吸尘组件进行吸尘操作;否则,确定所述当前工作模式为出风模式,所述出风模式用于指示所述出风组件进行出风操作。
6、在本申请的一些实施方式中,所述自移动设备还配置有出水组件;在所述控制所述出风组件进行出风操作的过程中,所述清扫控制方法还包括:获取所述出风组件进行出风操作时的出风方向;根据出风方向,确定所述出水组件的出水方向;根据所述出水方向,控制所述出水组件执行洒水操作或冲水操作。
7、在本申请的一些实施方式中,所述获取待清扫物体的物体信息,包括:控制所述自移动设备移动;在所述自移动设备移动的过程中,控制所述悬臂式探头进行物体检测,得到所述物体信息。
8、在本申请的一些实施方式中,所述悬臂式探头还集成有滚轮;所述控制所述悬臂式探头进行物体检测,得到所述物体信息,包括:获取路边石的位置信息;根据所述位置信息,控制所述滚轮紧贴所述路边石滚动,以使所述悬臂式探头朝向所述路边石与路面形成的角落;控制所述悬臂式探头对所述角落进行检测,得到所述物体信息。
9、本申请实施例第二方面提供的一种自移动设备的清扫控制装置,所述自移动设备配置有悬臂式探头,所述悬臂式探头集成有吸尘组件和出风组件,所述清扫控制装置包括:获取单元,用于获取待清扫物体的物体信息;确定单元,用于根据所述物体信息,确定所述自移动设备的当前工作模式;清扫控制单元,用于根据所述当前工作模式,控制所述吸尘组件进行吸尘操作或控制所述出风组件进行出风操作。
10、本申请实施例第三方面提供一种电子设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述自移动设备的清扫控制方法的步骤。
11、本申请实施例第四方面提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述自移动设备的清扫控制方法的步骤。
12、本申请实施例第五方面提供了一种计算机程序产品,当计算机程序产品在电子设备上运行时,使得电子设备执行上述自移动设备的清扫控制方法的步骤。
13、在本申请的实施方式中,通过获取待清扫物体的物体信息,根据物体信息,确定自移动设备的当前工作模式,并根据当前工作模式,控制吸尘组件进行吸尘操作或控制出风组件进行出风操作,可以通过悬臂式探头对角落内不易清扫的垃圾进行清扫,并且可以根据物体信息自适应地在吸尘和出风之间选择清扫方式,从而提高自移动设备对垃圾的清扫效果。
技术特征:
1.一种自移动设备的清扫控制方法,其特征在于,所述自移动设备配置有悬臂式探头,所述悬臂式探头集成有吸尘组件和出风组件,所述清扫控制方法包括:
2.如权利要求1所述的自移动设备的清扫控制方法,其特征在于,所述自移动设备配置有滚刷,所述滚刷为中空设计;
3.如权利要求2所述的自移动设备的清扫控制方法,其特征在于,所述悬臂式探头为中空结构,所述出风组件包括设置于悬臂式探头一端的出风口、设置于所述悬臂式探头外延的导流腔,以及在所述导流腔远离所述悬臂式探头一端的进风口;
4.如权利要求1至3任意一项所述的自移动设备的清扫控制方法,其特征在于,所述物体信息包括所述待清扫物体的物体类型和物体尺寸;
5.如权利要求1至3任意一项所述的自移动设备的清扫控制方法,其特征在于,所述自移动设备还配置有出水组件;
6.如权利要求1至3任意一项所述的自移动设备的清扫控制方法,其特征在于,所述获取待清扫物体的物体信息,包括:
7.如权利要求6所述的自移动设备的清扫控制方法,其特征在于,所述悬臂式探头还集成有滚轮;
8.一种自移动设备的清扫控制装置,其特征在于,所述自移动设备配置有悬臂式探头,所述悬臂式探头集成有吸尘组件和出风组件,所述清扫控制装置包括:
9.一种电子设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1至7任一项所述自移动设备的清扫控制方法的步骤。
10.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至7任一项所述自移动设备的清扫控制方法的步骤。
技术总结
本申请适用于智能控制技术领域,提供了一种自移动设备的清扫控制方法、装置、电子设备和存储介质。其中,所述自移动设备配置有悬臂式探头集成有吸尘组件和出风组件,所述清扫控制方法包括:获取待清扫物体的物体信息;根据所述物体信息,确定所述自移动设备的当前工作模式;根据所述当前工作模式,控制所述吸尘组件进行吸尘操作或控制所述出风组件进行出风操作。本申请的实施例可以自适应地依据物体信息选择悬臂式探头的清扫方式,从而提高自移动设备对垃圾的清扫效果。
技术研发人员:尚小琴,郑运凡
受保护的技术使用者:深圳市升阳升人居环境服务有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!