脱困铲雪方法、装置及扫雪机与流程
本发明涉及扫雪机,尤其涉及一种脱困铲雪方法、装置及扫雪机。
背景技术:
1、现有的扫雪机是通过人工操作扫雪机运动的方向,进而形成机器路径,此方式扫雪机不能实现智能化行走,且行走的过程中,若顶到如地面凸起、冰柱以及地缝时,扫雪机很容易爬到雪推上,造成扫雪机打滑现象,影响扫雪机的扫雪效率,现有的扫雪机处于困境状况时,通过原路后退的方式进行脱困,使得绕行距离变长,导致扫雪机的扫雪效率受到影响。
2、上述内容仅用于辅助理解本发明的技术方案,并不代表承认上述内容是现有技术。
技术实现思路
1、本发明的主要目的在于提供了一种脱困铲雪方法、装置及扫雪机,旨在解决现有技术扫雪机通过原路后退的方式进行脱困,使得绕行距离变长,导致扫雪机的工作效率受到影响的技术问题。
2、为实现上述目的,本发明提供了一种脱困铲雪方法,所述方法包括以下步骤:
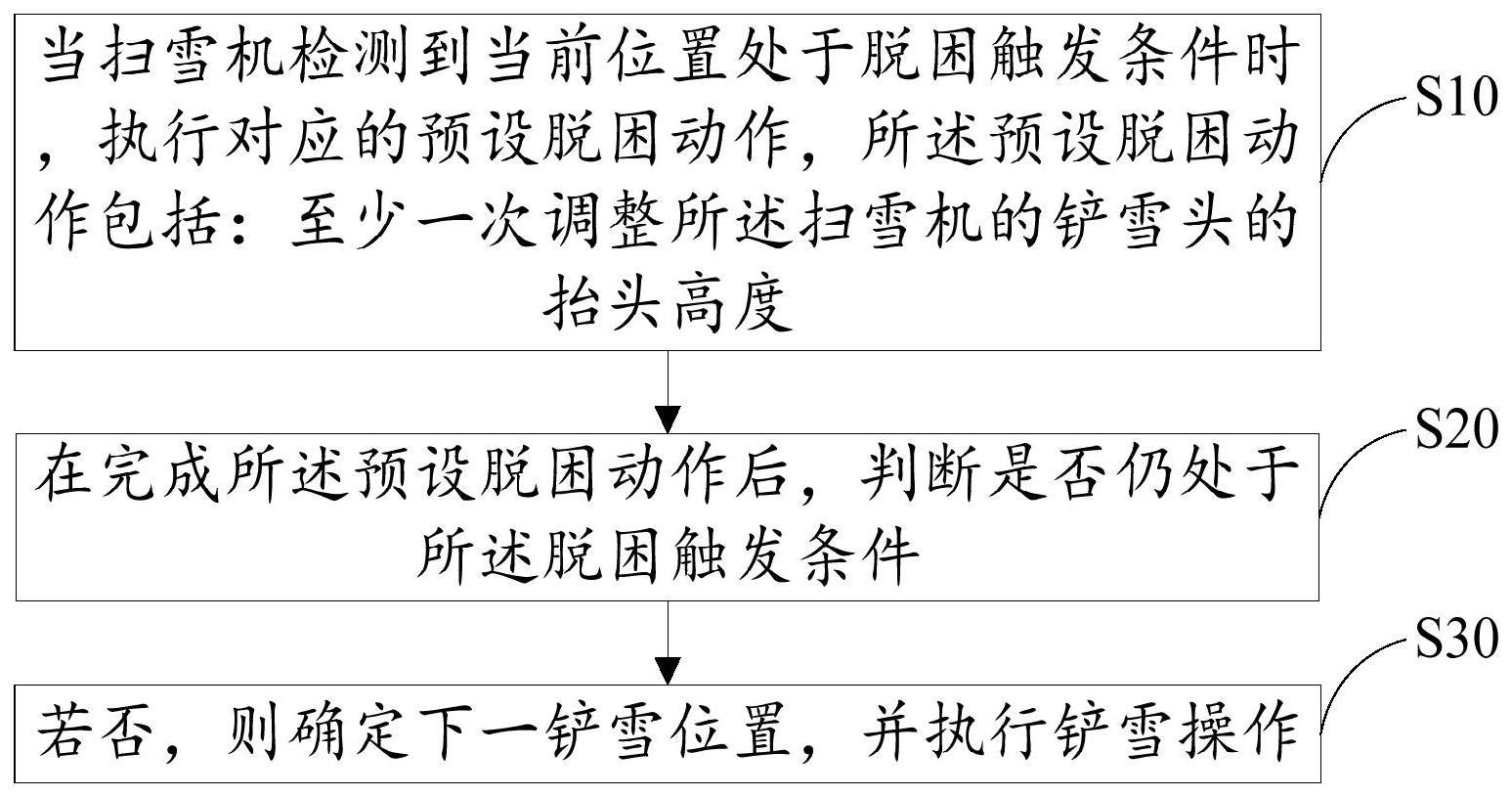
3、当扫雪机检测到当前位置处于脱困触发条件时,执行对应的预设脱困动作,所述预设脱困动作包括:至少一次调整所述扫雪机的铲雪头的抬头高度;
4、在完成所述预设脱困动作后,判断是否仍处于所述脱困触发条件;
5、若否,则确定下一铲雪位置,并执行铲雪操作。
6、可选地,所述脱困触发条件包括第一脱困触发条件,所述第一脱困触发条件为所述扫雪机非第一次执行自动铲雪操作或所述扫雪机的电机电流大于预设阈值时,所述扫雪机打滑;
7、所述预设脱困动作包括以下步骤:
8、后退第一预设距离,并将所述铲雪头的抬头高度调整至目标抬头高度;
9、前进第二预设距离并执行铲雪操作;
10、在前进所述第二预设距离的过程中,若前进距离达到预设距离阈值,则判断所述电机电流是否大于预设阈值;
11、若否,则以所述目标抬头高度继续铲雪,在确定完成铲雪后,调整所述铲雪头的抬头高度为贴地高度。
12、可选地,所述在前进所述第二预设距离的过程中,若前进距离达到预设距离阈值,则判断所述电机电流是否大于预设阈值的步骤之后,包括:
13、若是,在所述前进距离上后退所述第一预设距离,并将所述铲雪头的抬头高度调整至贴地高度;
14、继续前进所述第二预设距离,并在前往所述下一铲雪位置的过程中,保持所述铲雪头的抬头高度为贴地高度。
15、可选地,所述脱困触发条件包括第二脱困触发条件,所述第二脱困触发条件为所述扫雪机第一次执行自动铲雪操作或标记位置被手动开启后,所述扫雪机打滑;
16、所述预设脱困动作还包括以下步骤:
17、将所述铲雪头的抬头高度按预设高度间隔从贴地高度进行调高;
18、根据所述扫雪机的定位信息判断当前位置的所述扫雪机是否打滑;
19、若是,则返回所述将所述铲雪头的抬头高度按预设高度间隔进行调高的步骤,直至所述铲雪头的抬头高度被调整为铲雪头抬头高度的上限值,将当前位置作为标记位置,并记录所述标记位置和所述标记位置对应的标记抬头高度;
20、若否,则将当前位置作为标记位置,并记录所述标记位置和所述标记位置对应的标记抬头高度。
21、可选地,所述方法还包括:
22、在所述扫雪机运行至与所述下一铲雪位置对应的标记位置时,将所述扫雪机的抬头高度调整至标记抬头高度。
23、可选地,所述方法还包括:
24、在所述扫雪机第一次自动执行铲雪操作的情况下,检测所述扫雪机的电机电流是否大于预设阈值;
25、若是,则将所述铲雪头的抬头高度调整至贴地高度进行铲雪;
26、确定下一目标位置执行铲雪操作。
27、可选地,所述当扫雪机检测到当前位置处于脱困触发条件时,执行对应的预设脱困动作的步骤之后,包括:
28、通过定位信息确定当前位置,并判断所述当前位置是否超出边界;
29、若是,获取通过定位信息确定的历史坐标位置并返回至所述历史坐标位置对应的历史位置,并继续执行铲雪操作。
30、可选地,所述方法还包括:
31、在调整所述扫雪机的铲雪头抬头高度时,通过推杆值与铲雪头的抬头高度之间的关系确定目标推杆值;
32、将当前推杆值调整至所述目标推杆值,以调整所述铲雪头的抬头高度。
33、此外,为实现上述目的,本发明还提出一种脱困铲雪装置,所述装置包括:
34、检测模块,用于当扫雪机检测到当前位置处于脱困触发条件时,执行对应的预设脱困动作,所述预设脱困动作包括:至少一次调整所述扫雪机的铲雪头的抬头高度;
35、判断模块,用于在完成所述预设脱困动作后,判断是否仍处于所述脱困触发条件;
36、铲雪模块,用于则确定下一铲雪位置,并执行铲雪操作。
37、此外,为实现上述目的,本发明还提出一种扫雪机,所述扫雪机包括:铲雪头、扫雪机车身和控制器,所述铲雪头可拆卸连接于所述扫雪机车身,所述控制器设置于所述扫雪机车身,所述控制器用于控制所述铲雪头和所述铲雪电机,所述控制器可运行脱困铲雪程序,所述脱困铲雪程序配置为实现如上文所述的脱困铲雪方法的步骤。
38、本发明在扫雪机检测到当前位置处于脱困触发条件时,执行对应的预设脱困动作,所述预设脱困动作包括:至少一次调整所述扫雪机的铲雪头的抬头高度;在完成所述预设脱困动作后,判断是否仍处于所述脱困触发条件;若否,则确定下一铲雪位置,并执行铲雪操作。本发明通过检测脱困触发条件触发预设脱困动作,调整铲雪头的抬头高度进行脱困操作,解决了现有的在扫雪机处于困境时,通过原路后退的方式进行脱困,使得绕行距离变长的技术问题,提高了扫雪机铲雪效率。
技术特征:
1.一种脱困铲雪方法,其特征在于,所述方法包括:
2.如权利要求1所述的脱困铲雪方法,其特征在于,所述脱困触发条件包括第一脱困触发条件,所述第一脱困触发条件为所述扫雪机非第一次执行自动铲雪操作或所述扫雪机的电机电流大于预设阈值时,所述扫雪机打滑;
3.如权利要求2所述的脱困铲雪方法,其特征在于,所述在前进所述第二预设距离的过程中,若前进距离达到预设距离阈值,则判断所述电机电流是否大于预设阈值的步骤之后,包括:
4.如权利要求1所述的脱困铲雪方法,其特征在于,所述脱困触发条件包括第二脱困触发条件,所述第二脱困触发条件为所述扫雪机第一次执行自动铲雪操作或标记位置被手动开启后,所述扫雪机打滑;
5.如权利要求1至4任一项所述的脱困铲雪方法,其特征在于,所述方法还包括:
6.如权利要求1所述的脱困铲雪方法,其特征在于,所述方法还包括:
7.如权利要求1至4任一项所述的脱困铲雪方法,其特征在于,所述当扫雪机检测到当前位置处于脱困触发条件时,执行对应的预设脱困动作的步骤之后,包括:
8.如权利要求1至4任一项所述的脱困铲雪方法,其特征在于,所述方法还包括:
9.一种脱困铲雪装置,其特征在于,所述装置包括:
10.一种扫雪机,其特征在于,所述扫雪机包括:铲雪头、扫雪机车身和控制器,所述铲雪头可拆卸连接于所述扫雪机车身,所述控制器设置于所述扫雪机车身,所述控制器用于控制所述铲雪头和所述铲雪电机,所述控制器可运行脱困铲雪程序,所述脱困铲雪程序配置为实现如权利要求1至8中任一项所述的脱困铲雪方法的步骤。
技术总结
本发明涉及扫雪机技术领域,公开了一种脱困铲雪方法、装置及扫雪机,该方法在扫雪机检测到当前位置处于脱困触发条件时,执行对应的预设脱困动作,所述预设脱困动作包括:至少一次调整所述扫雪机的铲雪头的抬头高度;在完成所述预设脱困动作后,判断是否仍处于所述脱困触发条件;若否,则确定下一铲雪位置,并执行铲雪操作。本发明通过检测脱困触发条件触发预设脱困动作,调整铲雪头的抬头高度进行脱困操作,解决了现有的在扫雪机处于困境时,通过原路后退的方式进行脱困,使得绕行距离变长的技术问题,提高了扫雪机铲雪效率。
技术研发人员:黄阳,张伟,郑楚伟,叶瀚文
受保护的技术使用者:深圳汉阳科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!