沥青路面裂缝微波加热原位智能自修复系统
本发明涉及一种沥青路面裂缝微波加热原位智能自修复系统。
背景技术:
1、沥青路面,是指在矿质材料中掺入路用沥青材料铺筑的各种类型的路面。沥青结合料提高了铺路用粒料抵抗行车和自然因素对路面损害的能力,使路面平整少尘、不透水、经久耐用。
2、裂缝是荷载和温度变化对公路沥青路面造成常见的公路病害之一,主要包括横向裂缝、纵向裂缝以及龟裂,严重影响了公路的服务质量。而一旦沥青路面出现裂缝,就需要及时对裂缝的进行养护,避免病害的进一步扩展。
3、目前机器人的驱动装置存在着一些问题和局限,例如驱动精度不高、工作效率低、容易受到环境变化影响等。因此,需要一种新型的自适应机器人驱动装置,以克服这些问题和局限。
技术实现思路
1、本发明的目的是提供一种沥青路面裂缝微波加热原位智能自修复系统,以解决目前沥青道路养护效率低、驱动精度不高的问题。
2、为解决上述技术问题,本发明提供一种沥青路面裂缝微波加热原位智能自修复系统,包括:
3、微波加热装置,用于根据修复指令对沥青路面裂缝进行加热修复;
4、移动控制子系统,用于控制所述微波加热装置按照规划路线自动移动行走;
5、裂缝识别子系统,用于采集沥青路面图像,识别所述沥青路面图像中的沥青路面裂缝,计算沥青路面裂缝面积,根据沥青路面裂缝面积生成修复指令;
6、裂缝修复评价子系统,用于在利用微波加热装置对沥青路面裂缝进行加热修复后,对修复后的沥青路面裂缝进行修复效果评价。
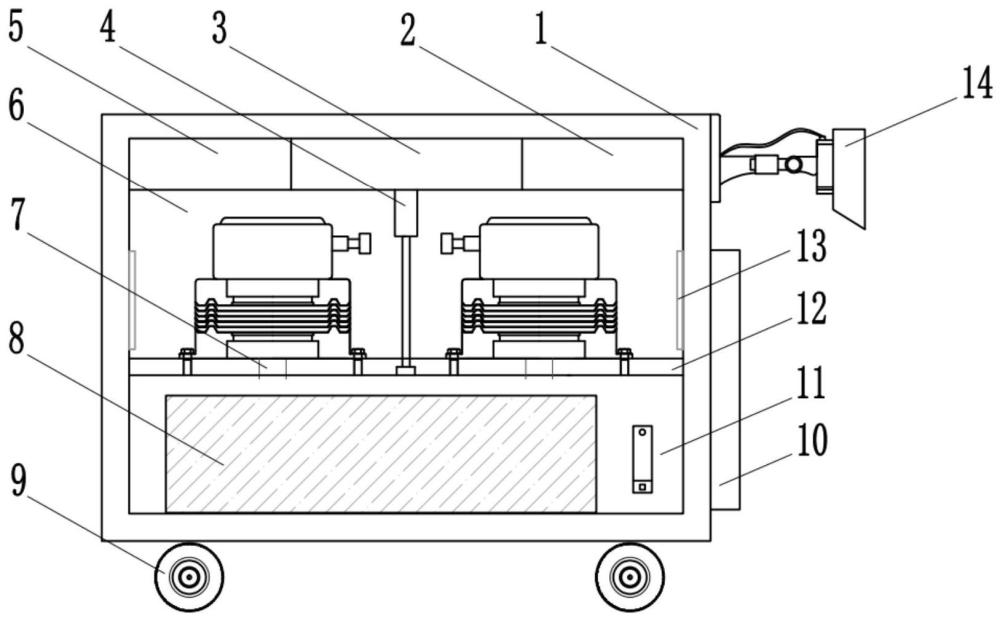
7、进一步地,微波加热装置包括壳体和至少一个微波发生器;所述壳体上部为设备箱,壳体下部为开口的加热箱;所述微波发生器安装在所述设备箱内且微波发生器的发生的微波能量经加热箱的箱壁反射后对加热箱开口下方的沥青路面裂缝进行加热修复。
8、进一步地,移动控制子系统包括行走机构和移动控制模块;所述行走机构安装在壳体的下方两侧,包括驱动电机、输出轴、减速器和行走轮;所述输出轴可旋转地安装在所述壳体的底部,所述行走轮安装在所述输出轴的输出端,所述驱动电机通过减速器驱动输出轴旋转;所述移动控制模块用于控制驱动电机的转速和转向,并根据设定目标点规划行走路径。
9、进一步地,移动控制模块采用如下方法控制驱动电机的转速和转向:
10、s11:设定驱动电机的目标转速值和目标转向值;
11、s12:采集驱动电机的实时反馈信息,所述实时反馈信息包括实时转速信息和实时转向信息,并将采集到的实时反馈信息分别与目标转速值和目标转向值进行比较,得到转速误差和转向误差;
12、s13:利用闭环控制算法根据所述转速误差计算驱动电机的转速控制量,利用差速控制算法根据转向误差计算驱动电机的转向控制量;
13、s14:根据所述转速控制量和转向控制量,将控制输出应用到驱动电机,调整pwm信号的占空比或驱动电机的电压和电流;
14、s15:循环步骤s1-s4,根据实时反馈信号与目标转速值和目标转向值进行误差计算和控制输出更新,实现驱动装置的自适应控制。
15、进一步地,移动控制模块采用如下算法根据设定目标点规划行走路径:
16、s21:初始化一颗树,将根节点设置为微波加热装置的初始位置
17、s22:我们进行随机采样,随机选择一个目标点,并将其与树中距离最近的节点连接,以扩展树;
18、s23:我们验证新添加的节点和边是否在环境中可行,即不与障碍物相交;
19、s24:检测是否已接近目标点,如果是,生成路径;否则,继续采样和扩展;
20、s25:生成一条路径,连接树的根节点到目标点。
21、进一步地,裂缝识别子系统包括图像采集模块、裂缝识别模块、裂缝评价模块和数据存储传输模块;所述图像采集模块用于采集沥青路面图像,所述裂缝识别模块用于识别所述沥青路面图像中的沥青路面裂缝;所述裂缝评价模块用于计算识别出的沥青路面裂缝的沥青路面裂缝面积,并根据沥青路面裂缝面积生成修复指令;数据存储传输模块用于将修复指令发送至微波加热装置,将计算出的沥青路面裂缝面积发送至裂缝修复评价子系统。
22、进一步地,裂缝识别模块利用深度学习目标检测模型yolov5s为基线模型,并引入space-to-depth结构和引入pconv结构,利用transformer构建ct3模块。
23、进一步地,沥青路面裂缝面积的计算方法包括:采用编码-解码结构的裂缝分割模型对识别到的沥青路面裂缝进行分割,统计分割后图像中值为裂缝相关像素个数即为该图中裂缝的相对面积;在本系统工作前使用图像采集模块在相同采集距离下对半径为r cm的白色纸片进行拍摄,可建立采集到的图像像素与实际物品大小的透视关系,得到裂缝相对面积与实际面积的换算公式:
24、
25、进一步地,裂缝修复评价子系统对修复后的沥青路面裂缝进行评价包括:
26、在利用微波加热装置对沥青路面裂缝进行加热修复后,再次调用所述裂缝评价模块对修复后的沥青路面裂缝面积进行测算,然后根据修复指数对修复效果进行评价;若修复指数r越接近0,则表示修复效果越好;若越远离0,则表示修复效果越较差。
27、进一步地,微波发生器通过用于调整微波发生器高度的升降机构安装在设备箱内;所述升降机构包括电动推杆,所述电动推杆的底座与设备箱的顶部固定连接,微波发生器安装电动推杆的驱动端。
28、本发明的有益效果为:
29、1、通过采用微波加热技术对沥青路面裂缝进行加热,使沥青受热融化后重新黏合在一起,可以实现快速响应,并且就地加热,修复过程更加灵活,不需要将沥青挖起来即可实现微裂缝快速养护;通过移动控制子系统可控制微波加热装置按照规划路线自动移动行走,不需要人力加入;通过裂缝识别子系统可对沥青路面上的裂缝进行识别,然后利用移动控制子系统驱动微波加热装置移动到裂缝部位的上方对裂缝进行加热修复,从而实现裂缝自动识别和自动加热修复;通过裂缝修复评价子系统可对经修复后的沥青路面裂缝进行修复效果评价,可保证修复效果。
技术特征:
1.一种沥青路面裂缝微波加热原位智能自修复系统,其特征在于,包括:
2.根据权利要求1所述的沥青路面裂缝微波加热原位智能自修复系统,其特征在于,所述微波加热装置包括壳体和至少一个微波发生器;所述壳体上部为设备箱,壳体下部为开口的加热箱;所述微波发生器安装在所述设备箱内且微波发生器的发生的微波能量经加热箱的箱壁反射后对加热箱开口下方的沥青路面裂缝进行加热修复。
3.根据权利要求2所述的沥青路面裂缝微波加热原位智能自修复系统,其特征在于,所述移动控制子系统包括行走机构和移动控制模块;所述行走机构安装在壳体的下方两侧,包括驱动电机、输出轴、减速器和行走轮;所述输出轴可旋转地安装在所述壳体的底部,所述行走轮安装在所述输出轴的输出端,所述驱动电机通过减速器驱动输出轴旋转;所述移动控制模块用于控制驱动电机的转速和转向,并根据设定目标点规划行走路径。
4.根据权利要求3所述的沥青路面裂缝微波加热原位智能自修复系统,其特征在于,所述移动控制模块采用如下方法控制驱动电机的转速和转向:
5.根据权利要求3或4所述的沥青路面裂缝微波加热原位智能自修复系统,其特征在于,所述移动控制模块采用如下算法根据设定目标点规划行走路径:
6.根据权利要求1所述的沥青路面裂缝微波加热原位智能自修复系统,其特征在于,所述裂缝识别子系统包括图像采集模块、裂缝识别模块、裂缝评价模块和数据存储传输模块;所述图像采集模块用于采集沥青路面图像,所述裂缝识别模块用于识别所述沥青路面图像中的沥青路面裂缝;所述裂缝评价模块用于计算识别出的沥青路面裂缝的沥青路面裂缝面积,并根据沥青路面裂缝面积生成修复指令;数据存储传输模块用于将修复指令发送至微波加热装置,将计算出的沥青路面裂缝面积发送至裂缝修复评价子系统。
7.根据权利要求6所述的沥青路面裂缝微波加热原位智能自修复系统,其特征在于,所述裂缝识别模块利用深度学习目标检测模型yolov5s为基线模型,并引入space-to-depth结构和引入pconv结构,利用transformer构建ct3模块。
8.根据权利要求7所述的沥青路面裂缝微波加热原位智能自修复系统,其特征在于,所述沥青路面裂缝面积的计算方法包括:采用编码-解码结构的裂缝分割模型对识别到的沥青路面裂缝进行分割,统计分割后图像中值为裂缝相关像素个数即为该图中裂缝的相对面积;在本系统工作前使用图像采集模块在相同采集距离下对半径为r cm的白色纸片进行拍摄,可建立采集到的图像像素与实际物品大小的透视关系,得到裂缝相对面积与实际面积的换算公式:
9.根据权利要求8所述的沥青路面裂缝微波加热原位智能自修复系统,其特征在于,所述裂缝修复评价子系统对修复后的沥青路面裂缝进行评价包括:
10.根据权利要求1所述的沥青路面裂缝微波加热原位智能自修复系统,其特征在于,所述微波发生器通过用于调整微波发生器高度的升降机构安装在设备箱内;所述升降机构包括电动推杆,所述电动推杆的底座与设备箱的顶部固定连接,微波发生器安装电动推杆的驱动端。
技术总结
本发明公开了一种沥青路面裂缝微波加热原位智能自修复系统,该系统包括微波加热装置、移动控制子系统、裂缝识别子系统和裂缝修复评价子系统;通过采用微波加热技术对沥青路面裂缝进行加热,使沥青受热融化后重新黏合在一起,可以实现快速响应,并且就地加热,修复过程更加灵活,不需要将沥青挖起来即可实现微裂缝快速养护;通过移动控制子系统可控制微波加热装置按照规划路线自动移动行走,不需要人力加入;通过裂缝识别子系统可对沥青路面上的裂缝进行识别,然后利用移动控制子系统驱动微波加热装置移动到裂缝部位的上方对裂缝进行加热修复,从而实现裂缝自动识别和自动加热修复;通过裂缝修复评价子系统进行修复效果评价,可保证修复效果。
技术研发人员:赵毅,刘鑫祥,胡楠,吴彦锜,李艺萌,林雪,曾晟,张文杰,段涛
受保护的技术使用者:重庆交通大学
技术研发日:
技术公布日:2024/2/6
- 还没有人留言评论。精彩留言会获得点赞!