一种基于三维激光扫描的压实度无人自动检测系统及方法
本发明属于公路施工质量检测,具体涉及一种基于三维激光扫描的压实度无人自动检测系统。
背景技术:
1、道路基层压实度质量是道路施工质量的重要检测指标,直接影响着道路的使用寿命及运行安全。根据现行的《公路路基路面现场测试规程》(jtg 3450-2019),常采用挖坑灌砂等方法对道路进行压实度的测量,通过挖坑取样测量试坑体积及土体质量计算干密度来测量压实度。由于在整个过程中均需要人工操作,人为因素对测量影响较大,存在着作业效率低的问题。
2、目前,已有一些基于灌砂法的压实度自动测量设备,在尽可能减少人工的前提下实现对试坑的自动开挖,并对压实度进行测量。但对于使用后的标准砂,如何对其进行自动化回收处理仍是一个关键问题。目前三维激光扫描技术已广泛应用到众多工程的目标体积测量之中,其中包括对坝料压实度检测中试坑体积的测量,但此技术鲜有用于道路压实度检测的试坑体积测算,且当前大多需要现场人员进行操控。
3、为此,考虑采用便携式三维激光扫描仪对试坑体积进行测量,并结合自动化机械设备,实现挖坑、取土、称重等压实度测量过程全程无人化,同时远程实时监控现场测量状况,避免使用灌砂法所带来的后续清理问题,降低整套装置的复杂程度,减少人力投入。
技术实现思路
1、本发明的目的在于克服现有技术的不足,提供一种基于三维激光扫描的压实度无人自动检测系统及方法,采用三维激光扫描技术代替传统灌砂法测量试坑体积,提高测量效率、方便后续处理,并与自动化开挖取土烘干技术相结合,减少人为干预,实现道路基层压实度的无人化智能采集和同步远程监控,确保试验结果的真实可控。
2、本发明解决其技术问题是通过以下技术方案实现的:
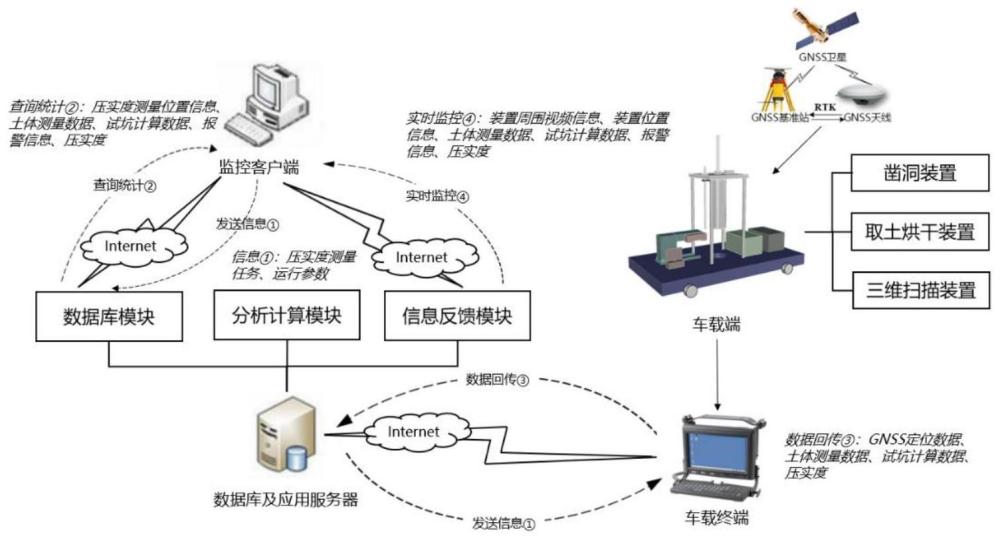
3、一种基于三维激光扫描的压实度无人自动检测系统,其特征在于:包括车载端、车载终端、数据库及应用服务器、监控客户端;
4、所述车载端包括gnss定位模块、凿洞装置、取土烘干装置、三维扫描装置、集成控制器及无线控制装置;
5、所述gnss定位模块实时获取检测系统的平面位置;所述凿洞装置使用螺旋刀片对所选区域进行自动开挖;
6、所述取土烘干装置吸出试坑内部残余土渣,并对所采集的土料进行烘干称重;
7、所述三维激光扫描装置通过对试坑进行扫描,获取试坑内部点云数据;
8、所述集成控制器控制车载端机械部件的运行;
9、所述无线控制装置远程控制车载端的移动;
10、所述车载终端对采集的数据进行处理计算,并对有关信息进行显示;
11、所述数据库及应用服务器包括数据库模块、分析计算模块及信息反馈模块,对数据进行存储、分析、传输;
12、所述监控客户端负责创建任务、设定参数、远程实时监控、在测量结束后统计并输出结果报表。
13、一种基于三维激光扫描的压实度无人自动检测方法,其特征在于:所述方法的步骤为:
14、1)登录监控客户端,创建道路基层平整度检测任务,设定凿洞深度、烘干时间、扫描幅度、开阀时间、开挖位置,并下达测量装置派遣指令;
15、2)将1)的信息通过internet网络存储到数据库及应用服务器的数据库模块中,采用gnss-rtk定位技术实时测量出车载端的位置信息,并发送到远程服务器端;
16、3)客户端根据装置位置信息,通过装置上布设的车载摄像头观测周围情况,利用无线控制装置操控装置移动到待测位置;
17、4)车载终端通过5g通讯方式访问数据库及应用服务器,从数据库模块中接收对应的任务信息,并通过集成控制器控制装置运行;
18、5)凿洞装置使套筒下降至与地面紧密贴合,采用螺旋刀片开挖试坑并输送开挖料至取土装置的储土盒中;
19、6)取土装置通过负压泵吸取试坑内部残留土渣,通过电动阀门使储土盒中一部分土体下落至采样盒中,并采用加热线圈进行加热烘干,通过称重传感器称量加热前后土样重量;
20、7)三维激光扫描装置对取土后的试坑进行扫描,采集点云数据,车载终端对点云数据进行处理计算,得到试坑内部体积,结合烘干前后的土样重量,计算出相应位置的土体干密度,得到道路基层压实度,并与其他相关信息一并显示;
21、8)无线控制装置将上述数据发送至数据库及应用服务器,通过其中的分析计算模块对上述信息进行分析处理,并将分析结果与数据信息存储在数据库模块中。监控客户端根据服务器中的信息,对道路压实度测量进行实时监控,压实度不合格时将进行报警,测量完成后,可进行结果查询统计,输出报表。
22、同时,对试坑点云数据进行处理,分析计算模块通过密度法、法向量聚类分割等方法划分出试坑内外点云数据,具体步骤如下:
23、①在采集到试坑及其附近的点云数据后,获取点云坐标中的高度最大值zmax,并提取出所有点云中高度z≤zmax-5(底板厚为5cm)的点云数据,该部分数据即为地表面及试坑内部的点云数据;
24、②根据地表面与试坑内部点云密度不同,选取适当的邻域半径r,对各点的邻域点云数nri进行统计,并通过下式计算检测参数
25、
26、式中:nr为检测参数;
27、n为总点云数;
28、k为小于1的系数;
29、当某点ai(xi,yi,zi)的邻域点云数nri点大于检测参数nr时,则将其归为试坑内部点qi,反之则将其归为地表面点pi,从而把全部点云数据划分为试坑内部点云和地表面点云两个部分;
30、③采用法向量聚类分割的方法对划分好的点云数据进行进一步处理,对于试坑内部点云数据q,采用matlab中的pcnormals函数计算出每个点的法向量nqi,而后考虑对其进行修正。
31、设点o坐标为
32、
33、式中,xi、yi、zi分别为点云数据中各点的空间坐标;
34、n为总点云数;
35、若点qi的法向量nqi与向量oqi的夹角α大于90°,则对相应点云法向量方向进行修正,反之则保留原法向量不变;
36、对于地表点云数据p,利用其拟合平面的法向量作为特征法向量n;首先设拟合平面的方程为:
37、ax+by+cz+d=0
38、方程可转化为
39、z=a0x+a1y+a2
40、利用最小二乘法得到以下矩阵
41、
42、求解得特征法向量n(a,b,c),进而求得试坑内部点q中各点云法向量nqi和特征法向量n的夹角θ;
43、④选取地表面点云p作为种子点云集,选择一点pi作为种子点,并在试坑内部点q中以搜索半径r0进行搜索,形成点云集合nq,同时统计其中每个点的法向量与特征向量n的夹角θ;
44、若nq中不存在θ大于阈值θ’的点,则证明其中所有的点均属于地表面点,在q中删除nq,同时增加r0(r0=r0+r0),继续在试坑内部点q中搜索;
45、若nq中存在夹角θ大于阈值θ’的点,则证明其中有部分点属于试坑内部点,在p中删除np,并重新选取一点pi重复上述步骤,直至p为空,则可得到试坑内表面点云数据。
46、进一步,通过切片法对分割好的点云数据进行计算确定试坑体积,具体步骤如下:
47、①用n+1个等间距的水平面自上而下切割试坑内部点云数据,得到系列水平点云切片si,采用下式计算;
48、
49、
50、式中,h为间距值;
51、h为试坑内部点云的最大高度;
52、n为切片数;
53、x、y、z为点云点坐标;
54、在切片上构建一个可以包含所有点的正方形,以其对角线焦点oi为端点,切片上任一点qi构建射线oiqi,并以此为初始扫描线进行逆时针扫描,将扫描到的点依次连接,生成边界轮廓多边形mi(i=0,1,…,n);
55、②采用下式进行多边形mi的面积ai的计算
56、
57、式中xi、yi为切片平面点云外轮廓多边形mi(i=0,1,…,n)的顶点mj(j=0,1,…,k)的坐标;j为点云切片外轮廓边界多边形的顶点编号;i为点云切片的编号;
58、③通过下式求得试坑分段体积并累加,即得整个试坑的体积v,
59、
60、式中ai为切片平面点云外轮廓多边形mi的面积;h为间距值;
61、④通过烘干得到的土样固体颗粒质量推算得到试坑内部全部固体颗粒质量,结合计算得到的体积v,采用下式进行土样干密度的计算;
62、
63、式中:ρd为土样干密度;
64、m为试坑内部固体颗粒质量;
65、车载显示终端将对计算参数(切片数量、间距等)、计算结果以及试坑模型等进行显示。
66、本发明的优点和有益效果为:
67、1、本发明基于三维激光扫描的压实度无人自动检测系统,可快速对采样位置进行试坑开挖取土,并烘干称重,根据三维激光扫描技术测量的试坑体积计算出土样干密度,实现压实度的自动测量。
68、2、本发明基于三维激光扫描的压实度无人自动检测系统,可将压实度测量结果及相关信息显示在车载端,并将现场数据传输到远程客户端,在测量结束后自动统计压实度分布情况,相关人员可以在远程实时监控压实度测量情况,并通过无线遥控装置控制装置移动,实现远程实时控制。
69、3、本发明基于三维激光扫描的压实度无人自动检测系统,结合三维激光扫描技术与自动开挖取土烘干技术,不仅可实现对道路基层压实度的自动测量,而且还可以实现数据自动采集与分析,以及远程实时监控。
70、4、本发明基于三维激光扫描的压实度无人自动检测系统,针对道路基层压实度测量的特点,利用便携式三维激光扫描仪,结合自动开挖取土烘干技术,研制出一种高度自动化的道路基层压实度测量装置。该装置可实现对道路基层的自动开挖取土,并进行快速烘干称重;可对试坑内部进行三维激光扫描,快速测量试坑体积,进而计算土样干密度,获得相应位置压实度;可将现场测量数据反馈到车载端与客户端,实现远程控制。
- 还没有人留言评论。精彩留言会获得点赞!