路面纵断面采集控制方法、系统、电子设备及存储介质与流程
本技术涉及数据处理,尤其是涉及一种路面纵断面采集控制方法、系统、电子设备及存储介质。
背景技术:
1、随着社会经济的发展,道路设施越来越多,为了保障道路交通安全、提高交通效率,针对道路进行管理、维护保养变得越来越重要。路面纵断面采集是道路管理、道路维护保养中重要的一部分,路面纵断面采集是指通过测量和记录道路的纵向坡度、起伏等数据,以获取道路纵断面的信息,这有助于了解道路的纵断面形态,为道路设计和维护提供基础数据。
2、目前,国内路面平整度、路面构造深度等纵断面采集的过程大多采用多点位或者单点位的方式将检测设备固定于车载横梁的采集模式,通过控制检测设备的运行来进行路面纵断面数据采集。但是检测设备固定在车载横梁上,检测的模式受车辆行驶的影响较大,不能实时适应道路路况的变化,导致检测设备采集到的路面纵断面相关的数据的可靠性较低。
技术实现思路
1、为了提升路面纵断面相关的数据可靠性,本技术提供一种路面纵断面采集控制方法、系统、电子设备及存储介质。
2、第一方面,本技术提供一种路面纵断面采集控制方法,包括:
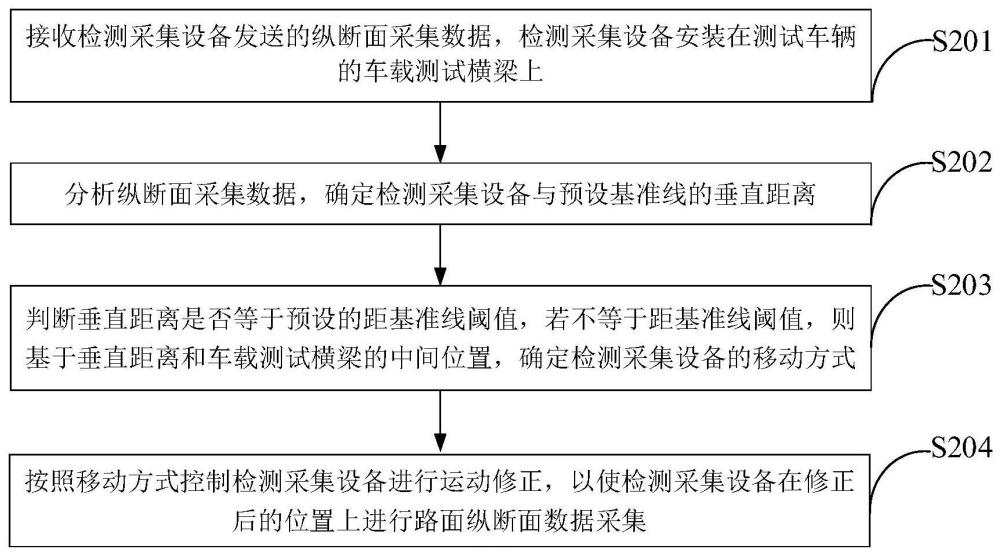
3、接收检测采集设备发送的纵断面采集数据;
4、分析所述纵断面采集数据,确定所述检测采集设备与预设基准线的垂直距离;
5、判断所述垂直距离是否等于预设的距基准线阈值,若不等于所述距基准线阈值,则基于所述垂直距离和车载测试横梁的中间位置,确定所述检测采集设备的移动方式;
6、按照所述移动方式控制所述检测采集设备进行运动修正,以使所述检测采集设备在修正后的位置上进行路面纵断面数据采集。
7、通过采用上述技术方案,接收检测采集设备发送的纵断面采集数据,能够实现对路面纵断面信息的实时采集和远程监控。同时,通过对采集的数据进行分析,可以确定检测采集设备与预设基准线的垂直距离,从而进一步判断设备的位置状态。通过判断垂直距离是否等于预设的距基准线阈值,来确定设备的移动方式。当垂直距离不等于预设阈值时,基于该垂直距离和车载测试横梁的中间位置,可以确定设备的移动方向,可以有效提高路面纵断面采集的精度和一致性。根据确定的移动方式,可以实现对检测采集设备的精确控制,使其按照预设的路径进行运动修正。这种修正方式可以使检测采集设备在修正后的位置上进行路面纵断面数据采集,进一步提高了采集数据的准确性和可靠性。本方案可以将多个模块集成到一个系统中,实现自动化控制和数据采集,这不仅可以提高工作效率,还可以减少人为错误和干预,提高数据的一致性和可靠性。整体可以有效提高路面纵断面采集的精度和一致性,为道路设计和维护提供基础数据支持。
8、可选的,所述方法还包括:
9、获取当前进行路面纵断面数据采集的目标道路与所述目标道路对应的路面纵断面采集路线;
10、根据所述路面纵断面采集路线和所述目标道路对应的默认道路信息,从所述目标道路上选取路面标线作为预设基准线。
11、通过采用上述技术方案,获取当前进行路面纵断面数据采集的目标道路信息,可以实现对目标道路的路面纵断面采集路线的整合和分析。这种数据获取和整合方式可以提高数据采集的准确性和效率。根据路面纵断面采集路线和目标道路对应的默认道路信息,从目标道路上选取路面标线作为预设基准线。这种选取方式可以确保预设基准线的准确性和一致性,为后续的路面纵断面采集提供可靠的参考依据。通过使用预设基准线,可以实现对路面纵断面采集设备的精确控制和自动化修正。这种控制方式可以提高采集数据的准确性和一致性,同时减少人为干预和错误。整体可以提高路面纵断面采集的精度和一致性,为道路设计和维护提供基础数据支持,还可以实现自动化控制和优化,降低人为干预和错误的风险,提高工作效率和质量。
12、可选的,所述方法还包括:
13、获取所述车载测试横梁所属测试车辆的车辆属性;
14、根据所述车辆属性、所述默认道路信息和所述路面纵横采集路线,生成距基准线阈值。
15、通过采用上述技术方案,获取车载测试横梁所属测试车辆的车辆属性,可以实现对车辆信息的整合和分析。这种数据获取和整合方式可以为后续的路面纵断面采集提供更加准确和可靠的数据支持。根据车辆属性、默认道路信息和路面纵横采集路线,生成距基准线阈值。这种生成方式可以确保阈值的准确性和一致性,为后续的路面纵断面采集提供可靠的参考依据。同时,通过对阈值的优化,可以进一步提高路面纵断面采集的精度和效率。整体可以提高路面纵断面采集的精度和一致性,为道路设计和维护提供基础数据支持。
16、可选的,所述基于所述垂直距离和车载测试横梁的中间位置,确定所述检测采集设备的移动方式,包括:
17、将车载测试横梁的中间位置作为原点;
18、基于所述原点和所述垂直距离,确定所述检测采集设备的当前位置坐标;
19、对原点的坐标和所述当前位置坐标进行计算,确定所述检测采集设备的偏移坐标,所述偏移坐标包括正负性和偏移数值;
20、将所述偏移坐标转化为移动方向和所述移动方向对应的横向修正距离,并将所述移动方向和所述横向修正距离作为所述检测采集设备的移动方式。
21、通过采用上述技术方案,将车载测试横梁的中间位置作为原点,基于原点和垂直距离,可以确定检测采集设备的当前位置坐标,可以直观地表示检测采集设备在路面上的位置,并为后续的修正提供基础。通过对原点的坐标和当前位置坐标进行计算,可以确定检测采集设备的偏移坐标,包括正负性和偏移数值,可以精确地描述检测采集设备在路面上的偏移情况,并为横向修正提供依据将偏移坐标转化为移动方向和移动方向对应的横向修正距离,可以进一步确定检测采集设备的移动方式,实现对检测采集设备的精确控制和自动化修正,提高路面纵断面采集的精度和一致性。整体可以提高路面纵断面采集的精度。
22、可选的,所述默认道路信息包括目标道路的道路长度和路面基本情况;所述方法还包括:
23、根据所述目标道路的道路长度和路面基本情况,确定所述目标道路的采集方式,所述采集方式包括单次纵断面采集和多次纵断面采集;
24、根据所述采集方式和所述道路长度,确定对应的路面检测距离;
25、获取所述车载测试横梁所属测试车辆的预设行驶速度和所述目标道路的检测开始时刻,确定所述路面检测距离和所述检测开始时刻对应的路面纵断面采集时段;
26、监控所述检测采集设备发送所述纵断面采集数据的发送时刻;
27、当所述发送时刻与所述路面纵断面采集时段的终止时刻对应时,提取所述路面纵断面采集时段对应的若干组纵断面采集数据;
28、剔除所述若干组纵断面采集数据中的待修正数据,确定标准纵断面采集数据,所述待修正数据为确定对所述检测采集设备进行运动修正的时刻的纵断面采集数据;
29、根据所述采集方式,对所述标准纵断面采集数据进行数据处理,确定优选纵断面采集数据,以基于所述优选纵断面采集数据确定目标道路的道路状况,所述数据处理的方式包括取平均值。
30、通过采用上述技术方案,根据目标道路的道路长度和路面基本情况,可以确定目标道路的采集方式,包括单次纵断面采集和多次纵断面采集。这种选择和优化方式可以适应不同的道路条件和需求,提高数据采集的准确性和效率。根据采集方式和道路长度,可以确定对应的路面检测距离,可以确保数据采集的完整性和准确性,同时避免数据冗余和浪费。当发送时刻与路面纵断面采集时段的终止时刻对应时,可以提取路面纵断面采集时段对应的若干组纵断面采集数据,并剔除其中的待修正数据,确定标准纵断面采集数据。这种修正方式可以提高数据的质量和一致性,同时避免错误数据的干扰。根据采集方式,对标准纵断面采集数据进行数据处理,确定优选纵断面采集数据,可以提高数据的准确性和可靠性,同时为后续的道路状况分析提供可靠依据。
31、第二方面,本技术提供一种路面纵断面采集控制系统,包括:工控机、检测采集设备、伺服电机和滚珠丝杠;
32、所述检测采集设备安装在测试车辆的车载测试横梁上,所述检测采集设备用于采集纵断面采集数据;
33、所述工控机用于接收所述检测采集设备发送的纵断面采集数据;分析所述纵断面采集数据,确定所述检测采集设备与预设基准线的垂直距离;判断所述垂直距离是否等于预设的距基准线阈值,若不等于所述距基准线阈值,则基于所述垂直距离和车载测试横梁的中间位置,确定所述检测采集设备的移动方式;按照所述移动方式控制所述检测采集设备进行运动修正,以使所述检测采集设备在修正后的位置上进行路面纵断面数据采集;
34、所述伺服电机用于根据所述移动方式驱动所述滚珠丝杠工作,以推动所述检测采集设备进行移动,完成运动修正;
35、所述检测采集设备用于在修正后的位置上进行路面纵断面数据采集。
36、可选的,所述工控机还用于:
37、获取当前进行路面纵断面数据采集的目标道路与所述目标道路对应的路面纵断面采集路线;
38、根据所述路面纵断面采集路线和所述目标道路对应的默认道路信息,从所述目标道路上选取路面标线作为预设基准线。
39、可选的,所述工控机还用于:
40、获取所述车载测试横梁所属测试车辆的车辆属性;
41、根据所述车辆属性、所述默认道路信息和所述路面纵横采集路线,生成距基准线阈值。
42、可选的,所述工控机在基于所述垂直距离和车载测试横梁的中间位置,确定所述检测采集设备的移动方式时,具体用于:
43、将车载测试横梁的中间位置作为原点;
44、基于所述原点和所述垂直距离,确定所述检测采集设备的当前位置坐标;
45、对原点的坐标和所述当前位置坐标进行计算,确定所述检测采集设备的偏移坐标,所述偏移坐标包括正负性和偏移数值;
46、将所述偏移坐标转化为移动方向和所述移动方向对应的横向修正距离,并将所述移动方向和所述横向修正距离作为所述检测采集设备的移动方式。
47、可选的,所述默认道路信息包括目标道路的道路长度和路面基本情况;所述工控机还用于:
48、根据所述目标道路的道路长度和路面基本情况,确定所述目标道路的采集方式,所述采集方式包括单次纵断面采集和多次纵断面采集;
49、根据所述采集方式和所述道路长度,确定对应的路面检测距离;
50、获取所述车载测试横梁所属测试车辆的预设行驶速度和所述目标道路的检测开始时刻,确定所述路面检测距离和所述检测开始时刻对应的路面纵断面采集时段;
51、监控所述检测采集设备发送所述纵断面采集数据的发送时刻;
52、当所述发送时刻与所述路面纵断面采集时段的终止时刻对应时,提取所述路面纵断面采集时段对应的若干组纵断面采集数据;
53、剔除所述若干组纵断面采集数据中的待修正数据,确定标准纵断面采集数据,所述待修正数据为确定对所述检测采集设备进行运动修正的时刻的纵断面采集数据;
54、根据所述采集方式,对所述标准纵断面采集数据进行数据处理,确定优选纵断面采集数据,以基于所述优选纵断面采集数据确定目标道路的道路状况,所述数据处理的方式包括取平均值。
55、可选的,所述路面纵断面采集控制系统还包括伺服电机和滚珠丝杠;
56、所述伺服电机用于根据所述移动方式驱动所述滚珠丝杠工作,以推动所述检测采集设备进行移动,完成运动修正;
57、第三方面,本技术提供一种工控机,包括:
58、数据接收模块,用于接收检测采集设备发送的纵断面采集数据,所述检测采集设备安装在测试车辆的车载测试横梁上;
59、垂直距离确定模块,用于分析所述纵断面采集数据,确定所述检测采集设备与预设基准线的垂直距离;
60、移动方式确定模块,用于判断所述垂直距离是否等于预设的距基准线阈值,若不等于所述距基准线阈值,则基于所述垂直距离和车载测试横梁的中间位置,确定所述检测采集设备的移动方式;
61、运动修正模块,用于按照所述移动方式控制所述检测采集设备进行运动修正,以使所述检测采集设备在修正后的位置上进行路面纵断面数据采集。
62、可选的,所述工控机还包括预设基准线确定模块,用于:
63、获取当前进行路面纵断面数据采集的目标道路与所述目标道路对应的路面纵断面采集路线;
64、根据所述路面纵断面采集路线和所述目标道路对应的默认道路信息,从所述目标道路上选取路面标线作为预设基准线。
65、可选的,所述工控机还包括阈值生成模块,用于:
66、获取所述车载测试横梁所属测试车辆的车辆属性;
67、根据所述车辆属性、所述默认道路信息和所述路面纵横采集路线,生成距基准线阈值。
68、可选的,所述移动方式确定模块在基于所述垂直距离和车载测试横梁的中间位置,确定所述检测采集设备的移动方式时,具体用于:
69、将车载测试横梁的中间位置作为原点;
70、基于所述原点和所述垂直距离,确定所述检测采集设备的当前位置坐标;
71、对原点的坐标和所述当前位置坐标进行计算,确定所述检测采集设备的偏移坐标,所述偏移坐标包括正负性和偏移数值;
72、将所述偏移坐标转化为移动方向和所述移动方向对应的横向修正距离,并将所述移动方向和所述横向修正距离作为所述检测采集设备的移动方式。
73、可选的,所述默认道路信息包括目标道路的道路长度和路面基本情况;所述工控机还包括道路状况确定模块,用于:
74、根据所述目标道路的道路长度和路面基本情况,确定所述目标道路的采集方式,所述采集方式包括单次纵断面采集和多次纵断面采集;
75、根据所述采集方式和所述道路长度,确定对应的路面检测距离;
76、获取所述车载测试横梁所属测试车辆的预设行驶速度和所述目标道路的检测开始时刻,确定所述路面检测距离和所述检测开始时刻对应的路面纵断面采集时段;
77、监控所述检测采集设备发送所述纵断面采集数据的发送时刻;
78、当所述发送时刻与所述路面纵断面采集时段的终止时刻对应时,提取所述路面纵断面采集时段对应的若干组纵断面采集数据;
79、剔除所述若干组纵断面采集数据中的待修正数据,确定标准纵断面采集数据,所述待修正数据为确定对所述检测采集设备进行运动修正的时刻的纵断面采集数据;
80、根据所述采集方式,对所述标准纵断面采集数据进行数据处理,确定优选纵断面采集数据,以基于所述优选纵断面采集数据确定目标道路的道路状况,所述数据处理的方式包括取平均值。
81、第四方面,本技术提供一种电子设备,包括:存储器和处理器,所述存储器上存储有能够被处理器加载并执行第一方面的方法的计算机程序。
82、第五方面,本技术提供一种计算机可读存储介质,存储有能够被处理器加载并执行第一方面的方法的计算机程序。
- 还没有人留言评论。精彩留言会获得点赞!