一种钢箱梁智能步履式多点连续顶推纠偏系统及施工方法与流程
本发明涉及桥梁工程,具体涉及一种钢箱梁智能步履式多点连续顶推纠偏系统及施工方法。
背景技术:
1、桥梁结构采用钢箱梁作为其主梁时,其施工方法可采用悬臂吊装法、顶推法、浮运法等。其中,顶推法作为历史悠久且工艺成熟的施工法之一,具有节省施工场地、成本低、施工稳定性好、施工精度高、对桥下通航和交通干扰少等特点,目前已广泛应用于跨越深谷河道、跨线桥、高架桥等中小跨度桥梁的施工中。
2、随着桥梁建设的迅猛发展和顶推施工工艺的日趋成熟,目前钢箱梁顶推施工方式呈现出多样化,如从单点顶推到多点顶推,从间歇式顶推到连续顶推等,顶拉锚固体系和顶推施工理论逐步完善,顶推施工的范围不断扩大,且可通过有限元分析对钢箱梁施工全过程进行模拟并对施工全过程进行实时监控,顶推施工的精度和安全性显著提高。就多点顶推而言,相继提出了拖拉式多点连续顶推、楔进式多点连续顶推和步履式多点连续顶推等多种顶推施工方法。
3、相较于拖拉式和楔进式的多点连续顶推方法,步履式多点连续顶推施工具有对永久或临时支墩影响小、临时结构型材投入量少、可有效控制支点反力等优点,在钢箱梁的顶推施工中具有广泛应用。但既有步履式多点连续顶推施工方法仍具有自动化程度低、施工进度慢、施工监测数据反馈不及时等问题。
技术实现思路
1、本发明的目的在于解决上述背景技术中提出的问题。提供一种钢箱梁智能步履式多点连续顶推纠偏系统及施工方法,将步履式顶推设备主控系统、北斗高精度定位系统、顶推全过程实时监测系统相结合形成智能化的步履式多点连续顶推和纠偏方法,是解决上述问题的有效途径。
2、一种钢箱梁智能步履式多点连续顶推纠偏系统,包括工字钢分配梁设置在临时支墩顶部,所述工字钢分配梁中心位置设置有智能步履式顶推设备,所述智能步履式顶推设备上部设置钢垫梁,所述工字钢分配梁两侧分别设置临时钢垫梁,所述临时钢垫梁上部设置钢箱梁,所述钢箱梁前端设置钢导梁,所述钢箱梁设置北斗三维高精度定位系统、温度传感器和应力传感器;所述智能步履式顶推设备包括顶推移动油缸、顶升支撑油缸、横向纠偏油缸,所述顶推移动油缸上设置顶升支撑油缸和横向纠偏油缸;所述北斗三维高精度定位系统、温度传感器、应力传感器和智能步履式顶推设备均与有顶推控制系统的计算机连接。
3、作为优选的,所述钢箱梁的两端和中部三个截面都设置北斗三维高精度定位系统和温度传感器,在每个截面的左、右、中均设置有北斗定位装置和温度传感器;所述钢箱梁的中腹板与底板连接部位的应力集中部位均设置应力传感器。
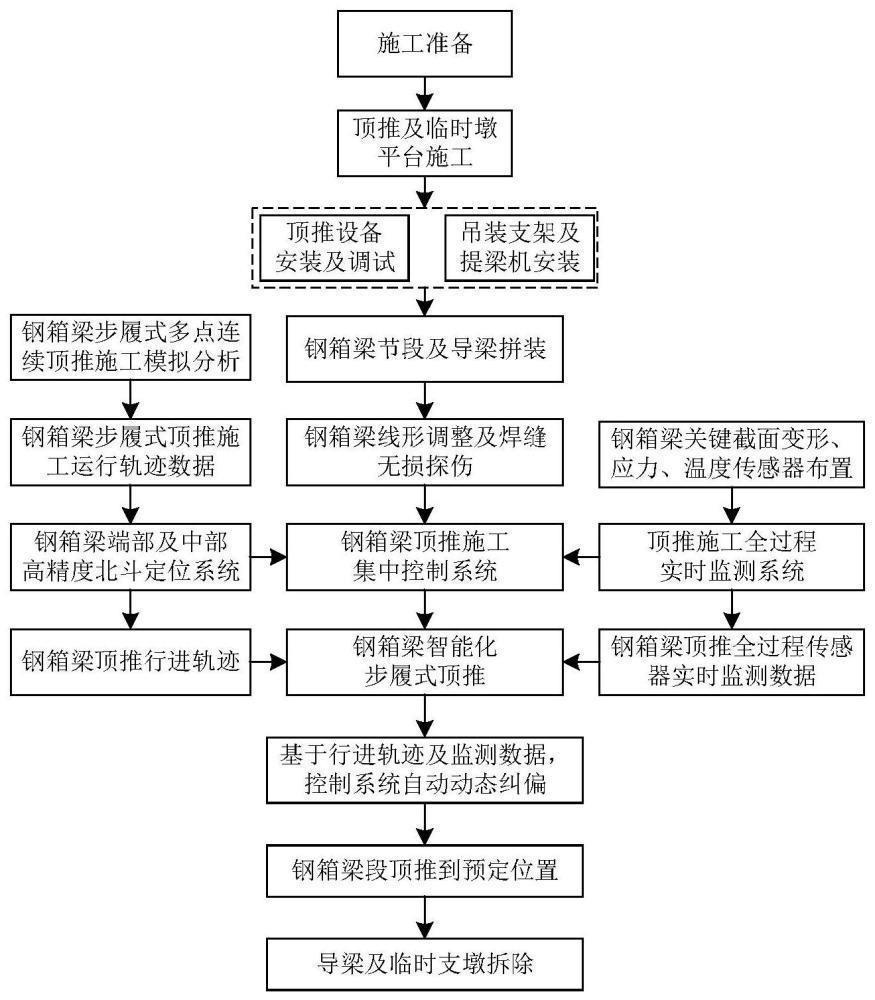
4、一种钢箱梁智能步履式多点连续顶推纠偏系统及施工方法,包括如下步骤:
5、(一)钢箱梁节段预制;
6、(二)顶推及临时支墩平台搭设;
7、(三)顶推设备安装及调试:工字钢分配梁设置在临时支墩顶部,所述工字钢分配梁中心位置设置有智能步履式顶推设备,所述智能步履式顶推设备上部设置钢垫梁,所述工字钢分配梁两侧分别设置临时钢垫梁,所述临时钢垫梁上部设置钢箱梁,所述钢箱梁前端设置钢导梁,所述钢箱梁设置北斗三维高精度定位系统、温度传感器和应力传感器;所述智能步履式顶推设备包括顶推移动油缸、顶升支撑油缸、横向纠偏油缸,所述顶推移动油缸上设置顶升支撑油缸和横向纠偏油缸;所述北斗三维高精度定位系统、温度传感器、应力传感器和智能步履式顶推设备均与有顶推控制系统的计算机连接;
8、(四)钢箱梁及导梁拼装;
9、(五)钢箱梁智能化顶推:钢箱梁采用智能化步履式多点连续顶推工艺进行顶推施工,其基本原理利用竖向顶升千斤顶将钢箱梁段整体多点同步托起,纵向水平千斤顶向前顶推实现钢箱梁段顺桥向移动,落梁后钢箱梁段搁置于临时钢垫梁上,顶推设备复位完成一个自平衡顶推行程;步履式顶推设备的单次顶推最大行程为0.45m,循环多次顶推行程可将钢箱梁段顶推到位;在钢箱梁段两端及中部安装北斗三维高精度定位系统,利用北斗定位系统对钢箱梁段运行轨迹进行实时监测,顶推控制系统依据监控系统数据自动调整千斤顶速度并自动动态调整纠偏,通过智能化步履式顶推方法实现钢箱梁的顶推和纠偏,循环上述拼装及顶推施工工序直至所有钢箱梁段均顶推到位;
10、(六)钢箱梁落架及合拢。
11、作为优选的,步骤五中所述顶推施工过程中应严格控制各千斤顶的顶升力,以免钢箱梁局部受力过大,引起其线形变化;为适应桥梁纵坡变化并确保接触面受力均匀,可根据纵坡实测数据调整临时钢垫梁和千斤顶上适当增加或减少楔形垫板。
12、作为优选的,所述自动动态调整纠偏包括根据制定的顶推施工方案,建立有限元模型模拟整个顶推过程,获得整个顶推过程钢箱梁的运行轨迹、腹板与底板连接部位的局部应力集中区域的应力历程,以及前、中、后三个关键断面钢箱梁的高程变化数据,然后把这些数据在顶推前全部预先录入到顶推控制系统的计算机内;在顶推过程中通过北斗三维高精度定位系统、温度传感器、应力传感器获取实时数据,并通过组建的无线局域网直接传输给计算机,顶推控制系统接收到这些实时的实测数据后进行处理和分析,并与顶推前预先录入系统中的理论数据进行综合对比,判断是否存在偏差;出现偏差后顶推控制系统可自动发送指令,启动横向纠偏油缸实现自动纠偏。如果横向偏差、高程、应力、温度等数据超过一定限值,则系统会发出警告并暂停顶推,转由人工控制。顶推开始前,根据桥梁纵坡、临时支墩刚度、顶推设备性能及经验等因素在顶推控制系统中给定一个初始顶推速度,后续的整个顶推及纠偏过程均由顶推控制系统的计算机自主判断和控制。
13、本发明的有益效果在于:
14、(1)智能化步履式多点连续顶推施工方法联合北斗三维高精度定位系统、传感技术和实时监测系统,可对顶推施工全过程中钢箱梁的运行轨迹、横向偏位、局部应力及温度等指标进行全方位监测或实时感知,采用计算机集中控制系统和变频调速控制技术,通过高度自动化实现钢箱梁自平衡顶推和纠偏;
15、(2)步履式多点连续顶推设备为自平衡系统,顶推施工过程中理论上对永久和临时支墩不产生水平力,可简化临时支墩结构并减少型材投入量,且对钢箱梁产生的损伤较小;
16、(3)通过传感技术将顶推施工全过程实时监测数据传递给顶推控制系统,可实时掌握钢箱梁顶推施工过程状态以确保顶推施工安全,且在顶推施工过程中可自动逐步调整钢箱梁线形;
17、(4)相较于既有的步履式顶推施工技术,智能化步履式多点连续顶推施工实现了钢箱梁顶推和纠偏的自动动态调整,缩短了顶推施工周期,且具有更高的顶推施工安全性。
技术特征:
1.一种钢箱梁智能步履式多点连续顶推纠偏系统,其特征在于,包括工字钢分配梁设置在临时支墩顶部,所述工字钢分配梁中心位置设置有智能步履式顶推设备,所述智能步履式顶推设备上部设置钢垫梁,所述工字钢分配梁两侧分别设置临时钢垫梁,所述临时钢垫梁上部设置钢箱梁,所述钢箱梁前端设置钢导梁,所述钢箱梁设置北斗三维高精度定位系统、温度传感器和应力传感器;所述智能步履式顶推设备包括顶推移动油缸、顶升支撑油缸、横向纠偏油缸,所述顶推移动油缸上设置顶升支撑油缸和横向纠偏油缸;所述北斗三维高精度定位系统、温度传感器、应力传感器和智能步履式顶推设备均与有顶推控制系统的计算机连接。
2.根据权利要求1所述的一种钢箱梁智能步履式多点连续顶推纠偏系统,其特征在于,所述钢箱梁的两端和中部三个截面都设置北斗三维高精度定位系统和温度传感器,在每个截面的左、右、中均设置有北斗定位装置和温度传感器;所述钢箱梁的钢箱梁中腹板与底板连接部位的应力集中部位均设置应力传感器。
3.一种基于权利要求1-2任一所述的一种钢箱梁智能步履式多点连续顶推纠偏系统的施工方法,其特征在于,包括如下步骤:
4.根据权利要求3所述的一种钢箱梁智能步履式多点连续顶推纠偏系统的施工方法,其特征在于,步骤五中所述顶推施工过程中应严格控制各千斤顶的顶升力,以免钢箱梁局部受力过大,引起其线形变化;为适应桥梁纵坡变化并确保接触面受力均匀,可根据纵坡实测数据调整临时钢垫梁和千斤顶上适当增加或减少楔形垫板。
5.根据权利要求3所述的一种钢箱梁智能步履式多点连续顶推纠偏系统的施工方法,其特征在于,步骤五中所述自动动态调整纠偏包括根据制定的顶推施工方案,建立有限元模型模拟整个顶推过程,获得整个顶推过程钢箱梁的运行轨迹、腹板与底板连接部位的局部应力集中区域的应力历程,以及前、中、后三个关键断面钢箱梁的高程变化数据,然后把这些数据在顶推前全部预先录入到顶推控制系统的计算机内;在顶推过程中通过北斗三维高精度定位系统、温度传感器、应力传感器获取实时数据,并通过组建的无线局域网直接传输给计算机,顶推控制系统接收到这些实时的实测数据后进行处理和分析,并与顶推前预先录入系统中的理论数据进行综合对比,判断是否存在偏差;出现偏差后顶推控制系统可自动发送指令,启动横向纠偏油缸实现自动纠偏;如果横向偏差、高程、应力、温度等数据超过一定限值,则系统会发出警告并暂停顶推,转由人工控制;顶推开始前,根据桥梁纵坡、临时支墩刚度、顶推设备性能及经验等因素在顶推控制系统中给定一个初始顶推速度,后续的整个顶推及纠偏过程均由顶推控制系统自主判断和控制。
技术总结
本发明公开了一种钢箱梁智能步履式多点连续顶推纠偏系统及施工方法。本系统包括工字钢分配梁设置在临时支墩顶部,所述工字钢分配梁中心位置设置有智能步履式顶推设备,所述智能步履式顶推设备上部设置钢垫梁,所述工字钢分配梁两侧分别设置临时钢垫梁,所述临时钢垫梁上部设置钢箱梁,所述钢箱梁前端设置钢导梁,所述钢箱梁设置北斗三维高精度定位系统、温度传感器和应力传感器;所述北斗三维高精度定位系统、温度传感器系统、应力传感器和智能步履式顶推设备均与顶推控制系统连接。本系统可根据实时数据控制系统,自动实施顶进工作,还能自动动态调整纠偏,为钢箱梁步履式顶推施工提供智能化解决途径。
技术研发人员:李秉海,王志宏,吴鹏,付承涛,蒋放,刘敏
受保护的技术使用者:中国建筑第五工程局有限公司
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!