一种三维RTK激光摊铺机的制作方法
本技术涉及摊铺机,尤其涉及一种三维rtk激光摊铺机。
背景技术:
1、在路桥施工中,需要对沥青和混凝土路面进行摊铺整平,摊铺的质量影响着路面质量。现有技术采用摊铺整平机对路面进行摊铺整平,以混凝土为例,由于原有地面高低不平,铺设混凝土后会存在高低不平、塌陷、平整度差、均匀性差等问题,利用摊铺机上的振动滚筒能够对混凝土路面进行振动压实,以提高混凝土路面的密实度、均匀性,摊铺机上的刮平板能够将混凝土刮平。在施工时,为了提高路面平整度,需要施工人员进行放线,劳动强度大,整平精度低,施工效率低。
2、而且现有技术的摊铺机采用gps技术来定位整平高程,虽然能够一定程度上提升整平精度,但是gps并不是动态的反馈数据,仅通过gps接收数据,精度无法达到毫米级,在摊铺过程中仍然无法达到理想的平整效果。因此,亟需一种新的技术方案解决以上至少一个技术问题。
技术实现思路
1、鉴于上述不足,本实用新型目的是提供一种三维rtk激光摊铺机,利用激光升降装置控制rtk激光接收器进行升降控制激光接收高程,机头升降装置控制机架升降来调整摊铺高程,操作简单,整平精度高,施工效率高,劳动强度低。
2、为了实现上述技术目的,达到上述的技术要求,本实用新型所采用的技术方案是:
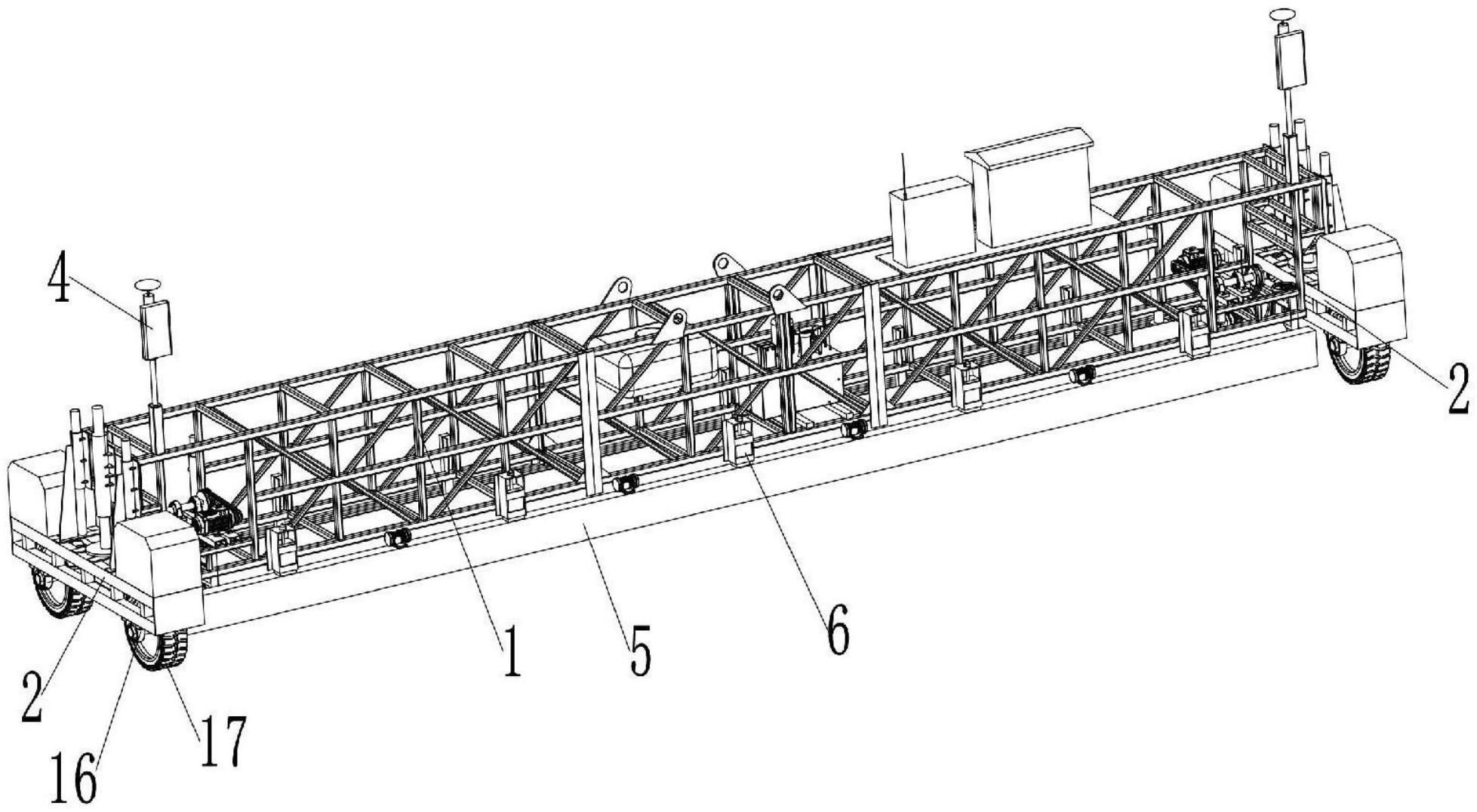
3、一种三维rtk激光摊铺机,包括机架、2个分别对称设置在所述机架两侧的侧支架、设置在所述机架上的滚动驱动总成、至少1个旋转设置在所述机架下部的振动滚筒、rtk激光接收器、设置在所述机架长度方向一侧的刮平板、设置在所述机架上的控制系统、行走轮总成,每个所述侧支架上设有激光升降装置和机头升降装置,所述rtk激光接收器设置在所述激光升降装置的滑动端上,所述机架与所述机头升降装置的滑动端连接,所述行走轮总成包括车轮、设置在所述侧支架下部的行走减速机、设置在所述侧支架下部的行走驱动电机,每个所述侧支架下端设有轮架,所述车轮设置在所述轮架上,所述行走驱动电机的输出端与所述行走减速机的输入端连接,所述行走减速机的输出端与所述车轮通过链条连接,所述激光升降装置、机头升降装置、rtk激光接收器、行走驱动电机与所述控制系统电连。
4、作为优选的技术方案,所述激光升降装置包括设置在所述侧支架上的激光升降伺服电机、激光升降滑台,所述激光升降伺服电机的输出端与所述激光升降滑台连接,所述rtk激光接收器设置在所述激光升降滑台的滑动端上。
5、作为优选的技术方案,所述机头升降装置包括机头升降伺服电机、机头升降滑台,所述机头升降滑台的滑动端与所述机架连接。
6、作为优选的技术方案,所述滚动驱动总成包括设置在所述机架上的滚动电机、2个滚动座和滚动轴,所述滚动轴可旋转插设在2个所述滚动座上,所述滚动轴一端设置有带轮,其另一端设置有第一齿轮,所述振动滚筒上设置有转轴,所述转轴一端设置有第二齿轮,所述带轮通过传动带与所述滚动电机的输出轴连接,所述第一齿轮通过链条与所述第二齿轮连接。
7、作为优选的技术方案,所述激光升降滑台上部设有激光升降上限开关,其下部设置有激光升降下限开关。
8、作为优选的技术方案,所述激光升降滑台上部设有机头升降上限开关,所述侧支架下部设置有机头升降下限开关。
9、作为优选的技术方案,所述行走减速机的输出轴上设置有行走编码器。
10、作为优选的技术方案,所述侧支架外侧设置有光电传感器。
11、作为优选的技术方案,所述机架长度方向的另一侧设有人行架。
12、作为优选的技术方案,所述机架为交叉桁架结构。
13、与传统的技术方案相比,本实用新型的有益效果是:
14、1)激光升降装置带动rtk激光接收器升降,调整激光接收高程,机头升降装置带动机架升降,调整滚筒的高程,使得整个摊铺机的摊铺高程调整更加精准,操作简单,生产效率高。
15、2)优选的,通过激光升降伺服电机带动激光升降滑台上下移动,从而带动rtk激光接收器升降,结构简单,升降效率高。
16、3)优选的,通过机头升降伺服电机带动机头升降滑台上下移动,从而带动rtk激光接收器升降,结构简单,升降效率高。
17、4)优选的,激光上限升降开关和激光下限开关感应rtk激光接收器的位置,以控制rtk激光接收器的高程。
18、5)优选的,机头升降上限开关和机头升降下限开关感应机架的位置,以控制机架的高程。
19、6)优选的,行走编码器防止车轮打滑,使得行走更为平稳。
20、7)优选的,人行架方便操作人员行走,操作更加方便。
21、8)优选的,交叉桁架强度高,且整体镂空,减轻整体重量。
技术特征:
1.一种三维rtk激光摊铺机,其特征在于,包括机架(1)、2个分别对称设置在所述机架(1)两侧的侧支架(2)、设置在所述机架(1)上的滚动驱动总成、至少1个旋转设置在所述机架(1)下部的振动滚筒(3)、rtk激光接收器(4)、设置在所述机架(1)长度方向一侧的刮平板(5)、设置在所述机架(1)上的控制系统(7)、行走轮总成,每个所述侧支架(2)上设有激光升降装置和机头升降装置,所述rtk激光接收器(4)设置在所述激光升降装置的滑动端上,所述机架(1)与所述机头升降装置的滑动端连接,所述行走轮总成包括车轮(17)、设置在所述侧支架(2)下部的行走减速机(18)、设置在所述侧支架(2)下部的行走驱动电机,每个所述侧支架(2)下端设有轮架(16),所述车轮(17)设置在所述轮架(16)上,所述行走驱动电机的输出端与所述行走减速机(18)的输入端连接,所述行走减速机(18)的输出端与所述车轮(17)通过链条连接,所述激光升降装置、机头升降装置、rtk激光接收器(4)、行走驱动电机与所述控制系统(7)电连。
2.根据权利要求1所述的三维rtk激光摊铺机,其特征在于,所述激光升降装置包括设置在所述侧支架(2)上的激光升降伺服电机(9)、激光升降滑台(10),所述激光升降伺服电机(9)的输出端与所述激光升降滑台(10)连接,所述rtk激光接收器(4)设置在所述激光升降滑台(10)的滑动端上。
3.根据权利要求2所述的三维rtk激光摊铺机,其特征在于,所述机头升降装置包括机头升降伺服电机(11)、机头升降滑台(12),所述机头升降滑台(12)的滑动端与所述机架(1)连接。
4.根据权利要求1所述的三维rtk激光摊铺机,其特征在于,所述滚动驱动总成包括设置在所述机架(1)上的滚动电机(24)、2个滚动座(25)和滚动轴(26),所述滚动轴(26)可旋转插设在2个所述滚动座(25)上,所述滚动轴(26)一端设置有带轮(27),其另一端设置有第一齿轮(28),所述振动滚筒(3)上设置有转轴(29),所述转轴(29)一端设置有第二齿轮(30),所述带轮(27)通过传动带与所述滚动电机(24)的输出轴连接,所述第一齿轮(28)通过链条与所述第二齿轮(30)连接。
5.根据权利要求2所述的三维rtk激光摊铺机,其特征在于,所述激光升降滑台(10)上部设有激光升降上限开关(20),其下部设置有激光升降下限开关(21)。
6.根据权利要求3所述的三维rtk激光摊铺机,其特征在于,所述激光升降滑台(10)上部设有机头升降上限开关(22),所述侧支架(2)下部设置有机头升降下限开关(23)。
7.根据权利要求1所述的三维rtk激光摊铺机,其特征在于,所述行走减速机(18)的输出轴上设置有行走编码器(19)。
8.根据权利要求1所述的三维rtk激光摊铺机,其特征在于,所述侧支架(2)外侧设置有光电传感器(31)。
9.根据权利要求1所述的三维rtk激光摊铺机,其特征在于,所述机架(1)长度方向的另一侧设有人行架(33)。
10.根据权利要求1-9中任一项所述的三维rtk激光摊铺机,其特征在于,所述机架(1)为交叉桁架结构。
技术总结
本技术公开了一种三维RTK激光摊铺机,包括机架、2个侧支架、设置在机架上的滚动驱动总成、至少1个振动滚筒、RTK激光接收器、设置在机架长度方向一侧的刮平板、设置在机架上的控制系统、行走轮总成,每个侧支架上设有激光升降装置和机头升降装置,RTK激光接收器设置在激光升降装置的滑动端上,机架与机头升降装置的滑动端连接,行走轮总成包括车轮、设置在侧支架下部的行走减速机、设置在侧支架下部的行走驱动电机,每个侧支架下端设有轮架,车轮设置在轮架上,行走驱动电机的输出端与行走减速机的输入端连接,行走减速机的输出端与车轮通过链条连接。本技术操作简单,整平精度高,施工效率高,劳动强度低。
技术研发人员:徐建秋,顾荣锋
受保护的技术使用者:徐建秋
技术研发日:20230529
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!