适于流体环境的机器人、医用肠胃机器人、娱乐机器人的制作方法
[0001]
本发明属于机器人领域,具体涉及适于流体环境的机器人、医用肠胃机器人、娱乐机器人。
背景技术:
[0002]
适于流体环境的机器人是指在水中或气体中运动的机器人,比如水下机器人、肠胃拍摄机器人、氢气球机器鱼、观赏型机器鱼。
[0003]
现有技术的流体环境机器人运动时,外形会发生变形,需要柔性或弹性外表面,现有技术的柔性或弹性材料强度一般不高,容易被刺穿或老化磨损。
[0004]
现有技术的机器人大多依靠机械传动实现运动,具有大量的关节结构,容易磨损,难以维护。
[0005]
现有机器人驱动方式常规,娱乐性不强。
技术实现要素:
[0006]
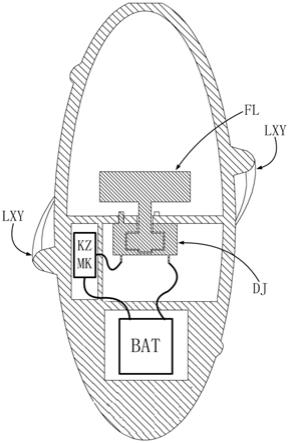
1、适于流体环境的机器人,其特征在于:包括壳体、电机(dj)、飞轮(fl)、控制模块(kzmk)、蓄电模块(bat);壳体具有轴线;壳体外表面具有流体驱动结构(lxy),当壳体绕轴线发生自转时,流体驱动结构(lxy)与环境中的流体产生力的作用,向壳体施力;电机(dj)与壳体固定连接;壳体与飞轮共轴;电机(dj)的转轴与飞轮(fl)相连,电机(dj)的转轴与飞轮(fl)共轴;控制模块(kzmk)控制电机的转动;蓄电模块(bat)给控制模块和电机供电。
[0007]
2、如发明内容1所述的适于流体环境的机器人,控制模块(kzmk)为开关。
[0008]
3、如发明内容1所述的适于流体环境的机器人,控制模块(kzmk)具有通信模块,用于遥控控制电机的启动或关闭。
[0009]
4、如发明内容1所述的适于流体环境的机器人,流体驱动结构(lxy)为螺旋板。
[0010]
5、如发明内容1所述的适于流体环境的机器人,流体驱动结构(lxy)为螺旋槽。
[0011]
6、如发明内容1所述的适于流体环境的机器人,还具有摄像头,用于采集环境信息。
[0012]
7、如发明内容1所述的适于流体环境的机器人,所述的流体为液体或气体。
[0013]
8、医用肠胃机器人,具有发明内容6所述的适于流体环境的机器人的所有特征,用于作为肠胃内镜。(不详处为现有技术或公知常识)9、娱乐机器人,具有发明内容1所述的适于流体环境的机器人的所有特征,作为儿童玩具。(不详处为现有技术或公知常识)
原理:本发明依靠电机带动飞轮转动,产生扭矩使壳体自转,流体驱动结构(lxy)与环境液体相作用,产生推力。
[0014]
有益效果:本发明的机器人外部为固定结构,运动时外部不发生变形或机械传动,不易磨损,不易卡住,对材料要求低。
[0015]
本发明创造力流体环境机器人的全新驱动方式,提供了一条新的技术思路。
[0016]
本发明可以作为医用肠胃内窥镜,也可以作为玩具,打开开关后丢在水里看它游动。
[0017]
本发明结构简单成本低廉,寿命长综上所述,本发明结构简单、成本低廉,寿命长、不易磨损,不易卡住,本发明提供了一条新的技术思路。
附图说明
[0018]
图1为实施例1的示意图。
[0019]
图2为图2的外部示意图。
[0020]
图3为图2的左侧视图。
[0021]
图4为实施例2的外部示意图。
[0022]
图5为实施例3的外部示意图。
[0023]
图6为实施例4的示意图。
具体实施方式
[0024]
实施例1、如图1-3所示,适于流体环境的机器人,其特征在于:包括壳体、电机(dj)、飞轮(fl)、控制模块(kzmk)、蓄电模块(bat);壳体具有轴线;壳体外表面具有流体驱动结构(lxy),当壳体绕轴线发生自转时,流体驱动结构(lxy)与环境中的流体产生力的作用,向壳体施力;电机(dj)与壳体固定连接;壳体与飞轮共轴;电机(dj)的转轴与飞轮(fl)相连,电机(dj)的转轴与飞轮(fl)共轴;控制模块(kzmk)控制电机的转动;蓄电模块(bat)给控制模块和电机供电。
[0025]
流体驱动结构(lxy)为螺旋板;螺旋板的数量为三,螺旋板以壳体的轴线为中心呈圆周阵列均匀分布。
[0026]
实施例2、在实施例1的基础上,修改设计,流体驱动结构(lxy)为螺旋槽。螺旋槽的数量为三,螺旋槽以壳体的轴线为中心呈圆周阵列均匀分布。
[0027]
实施例3、在实施例1的基础上,修改设计,改变螺旋板的高度。
[0028]
实施例4、在实施例1的基础上,控制模块(kzmk)为磁力开关,在外部绑上磁铁后,磁力开关导通,电机(dj)旋转产生扭矩使壳体自转,流体驱动结构(lxy)与环境液体相作
用,产生推力。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1