一种用于狭小空间救援分体式机器人的制作方法
1.本发明是一种用于狭小空间救援分体式机器人,用于对狭小空间内的待救人员进行探测和救援。
背景技术:
2.在我们的生活环境中存在着大量各种不同用途的孔、洞等,特别是电力设施中的坑洞,电力井等狭小空间。施工人员在其中发生晕倒等意外事件时有发生,而目前的救援方式仍需要用绳索121下放施救人员深入井下寻找待救人员,由于孔洞过于狭小,施救人员难以进入,且空气流通较差甚至含有毒气体,施救的难度很大,危险性很高。因此新型的救援方式采用机器人参与救援,但机器人在救援过程中常需要拖拽受伤人员,易造成被救人员二次伤害,如头部划伤或供氧不足窒息等。所以为了保证救援工作顺利以及人员安全,必须克服上述救援方式的不足。
3.中国专利cn201810894624中公开了爬壁式狭小空间作业机器人,该机器人采用电磁履带或者大密度吸盘吸附在变压器狭小空间的内壁上,通过搭载的多功能机械手臂配合不同工具的组合便可以完成一些人工难以完成的任务,对变压器内部进行绝缘修复、部件紧固、绕组复位作业,解决人员无法进入的狭小空间作业的问题。适宜作为爬壁式狭小空间作业机器人应用,但由于其结构复杂,如作业空间内壁上存在障碍物,无法有效的进行越障作业。
4.中国专利cn201710194767中公开了一种适用于狭小空间的深井救援机器人及救援方法,救援机器人可以依靠飞行机构或支腿在井下实现飞行运动或爬行运动,体积紧凑且可以满足水下救援,探路体下降时遇到障碍物可以进行躲避,通过能力强,适合狭小空间救援。探路体下降时绘制第一类深井地图、第二类深井地图有利于提高救援体、探路体的下降速度以及上升速度。其结构较为复杂,操作困难,对机器维护成本大,对于机器在下降过程中,实时调整和对信号传递的稳定性要求较高。
5.中国专利cn201210176880中公开了一种狭小空间内履带行驶装置,该机器人能够有效的在狭小空间内移动和完成探测工作其操作简单,适于废墟搜救及管道探测等应用。但于狭小空间内较大的障碍物无法越障,主要针对探测工作,救援功能弱化,无法有效完成。
6.中国专利cn201611237593中公开了一种适应狭小空间的模块化机器人,该机器人可在狭小空间内行走越障,并具有多种监测功能。但是其贵,不适用大规模有损耗的部署探测,对于信号传输以及机器稳定性具有较高要求。
技术实现要素:
7.为解决上述技术问题,本发明提供一种用于狭小空间救援分体式机器人,为被困在狭小空间内的施工待救人员提供救援,该发明为应对环境不明,具有多种可能存在的危险有害因素,诸如有毒气体、环境缺氧、易燃易爆气体、空间结构复杂等狭小空间提供环境
探测、有毒气体监测和供氧等多种功能于一体的救援帮助。由于救援机器人的天然因素,可以有效的避免由救援人员进行救援工作带来的救援人员救人心切,盲目进入有限的空间,造成救援人员自身危险的问题。
8.为实现上述技术目的,本发明采用的技术方案如下:
9.一种用于狭小空间救援分体式机器人,包括救援机器人和蠕动机器人,所述蠕动机器人安装在救援机器人内部,所述蠕动机器人包括前伸缩板和后伸缩板,所述前伸缩板连接有前驱动装置和前刹车滚轮,所述后伸缩板连接有后驱动装置和后刹车滚轮,所述后伸缩板连接有钢丝绳,所述救援机器人安装有与钢丝绳相匹配的缠绕机,所述前伸缩板连接有氧气管,所述前伸缩板设有与氧气管连通的氧气口,所述救援机器人安装有绳索挂钩,所述救援机器人安装有摄像头、气体探测装置,所述救援机器人安装有两个机械臂,所述机械臂设有机械爪,所述救援机器人内安装有可伸缩的固定夹持装置。
10.作为本发明的一种优选方案,所述固定夹持装置包括固定板,所述固定板连接有电动气缸,所述固定板安装有两个夹持抓。
11.作为本发明的一种优选方案,所述夹持抓和机械爪均设有软质保护垫。
12.作为本发明的一种优选方案,所述后伸缩板上设有四个防摔落挡片。
13.作为本发明的一种优选方案,所述救援机器人安装有电动撑杆。
14.作为本发明的一种优选方案,所述前伸缩板的右侧为弧形板设计,所述氧气口设置在弧形板处。
15.作为本发明的一种优选方案,所述前伸缩板右侧弧形板设计处连接有软质材料透气垫。
16.作为本发明的一种优选方案,所述救援机器人安装有氧气喷头,所述氧气喷头连接有第一氧气管。
17.本发明的有益效果:
18.本发明提供一种用于狭小空间救援分体式机器人,可突破狭小空间救援中的困难,如由于狭小空间洞口太小,造成的救援人员进出受限,进入之后的活动范围小,救援体力消耗过大,环境造成救援人员心理压力过大,供氧困难,准备器械不足等缺点,能够有效的救出待救人员,避免因救援不当造成的二次伤害,提供充足供氧,亦可减少因氧气不足带来的伤害。
附图说明
19.本发明可以通过附图给出的非限定性实施例进一步说明;
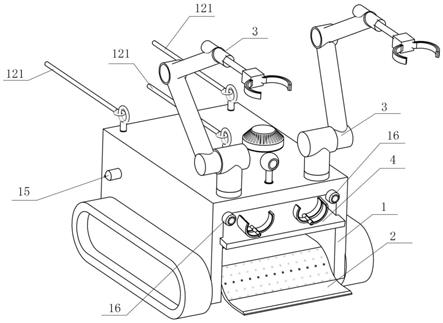
20.图1为本发明实施例一种用于狭小空间救援分体式机器人的结构示意图一;
21.图2为本发明实施例一种用于狭小空间救援分体式机器人的结构示意图二;
22.图3为本发明实施例一种用于狭小空间救援分体式机器人隐藏蠕动机器人后的结构示意图;
23.图4为本发明实施例一种用于狭小空间救援分体式机器人中的固定夹持装置结构示意图;
24.图5为本发明实施例一种用于狭小空间救援分体式机器人中的蠕动机器人结构示意图;
25.图6为本发明实施例一种用于狭小空间救援分体式机器人中前伸缩板处的结构示意图;
26.主要元件符号说明如下:
27.救援机器人1、缠绕机11、绳索挂钩12、摄像头13、气体探测装置14、电动撑杆15、氧气喷头16、第一氧气管17、蠕动机器人2、前伸缩板21、前驱动装置211、前刹车滚轮212、氧气管213、氧气口214、后伸缩板22、后驱动装置221、后刹车滚轮222、防摔落挡片223、钢丝绳23、机械臂3、机械爪31、固定夹持装置4、固定板41、电动气缸42、软质保护垫 43、夹持抓44。
具体实施方式
28.为了使本领域的技术人员可以更好地理解本发明,下面结合附图和实施例对本发明技术方案进一步说明。
29.如图1~图6所示,本发明的一种用于狭小空间救援分体式机器人,包括救援机器人1 和蠕动机器人2,蠕动机器人2安装在救援机器人1内部,蠕动机器人2包括前伸缩板21和后伸缩板22,前伸缩板21连接有前驱动装置211和前刹车滚轮212,后伸缩板22连接有后驱动装置221和后刹车滚轮222,后伸缩板22连接有钢丝绳23,救援机器人1安装有与钢丝绳23相匹配的缠绕机11,前伸缩板21连接有氧气管213,前伸缩板21设有与氧气管213连通的氧气口214,救援机器人1安装有绳索挂钩12,救援机器人1安装有摄像头13、气体探测装置14,救援机器人1安装有两个机械臂3,机械臂3设有机械爪31,救援机器人1内安装有可伸缩的固定夹持装置4。
30.其中,固定夹持装置4包括固定板41,固定板41连接有电动气缸42,固定板41安装有两个夹持抓44。这样的设计,使得固定夹持装置4能够更好的对人体夹持效果好。
31.其中,夹持抓44和机械爪31均设有软质保护垫43。这样的设计,避免救援过程中因机械结构造成对待救人员的二次损伤。
32.其中,后伸缩板22上设有四个防摔落挡片223。这样的设计,防止待救人员从蠕动机器人2摔下,造成二次伤害。
33.其中,救援机器人1安装有电动撑杆15。若由于狭小空间管道环境原因,在固定待救人员时,救援机器人1无法提供足够的摩擦力,则伸出位于救援机器人1上的电动撑杆15,与管道内壁固定,为该机器人动作提供足够的反作用力。
34.其中,前伸缩板21的右侧为弧形板设计,氧气口214设置在弧形板处。这样的设计,使得前伸缩板21能够更好的取匹配待救援人。
35.其中,前伸缩板21右侧弧形板设计处连接有软质材料透气垫。这样的设计,对待救援人其保护作用,防止其受到二次伤害。
36.其中,救援机器人1安装有氧气喷头16,氧气喷头16连接有第一氧气管17。可以通过氧气喷头16提供氧气。
37.在使用一种用于狭小空间救援分体式机器人的时候,将三脚架置于洞口处,卷扬机提供动力,伸出绳索121与救援机器人上的绳索挂钩12相连,为吊装提供动力;将救援机器人沿垂直管道吊装至待救人员被困的水平管道处,救援机器人本身携带氧气管213,为救援工作提供氧气,救援机器人配置的摄像头13和气体探测装置14通过信号传至地面终端,为救援工作提供参考,分析狭小空间内的环境,并为整个救援操作过程提供可靠的视频图
像,保证救援工作顺利进行;
38.通过绳索121将救援机器人下降到水平管道时,由上方操作人员操作救援机器人行至待救人员跟前:
39.若待救人员头部朝外,则控制救援机器人1通过机械臂3抓起待救人员手臂,释放蠕动机器人2进入待救人员头部下方位置,起到防护头部损伤的作用,并同时开启位于救援机器人1 上的氧气喷头16,为待救人员提供氧气,伸出固定夹持装置4,将待救人员手腕固定于此;
40.若待救人员头部朝里,则控制救援机器人1通过机械臂3抓起待救人员脚踝,释放蠕动机器人2,蠕动机器人2与救援机器人1通过钢丝绳23连接,前驱动装置211和后驱动装置221,为蠕动机器人前进提供动力,氧气管213和氧气口214的配合为待救人员提供氧气,为待救人员提供氧气,该蠕动机器人前进至被救人员头部处,用以托举被救人员头部,防止救援过程中的二次损伤;
41.后伸缩板22和前伸缩板21的配合,减少空间使用,提高便携性,且在尾部设有钢丝绳23 与救援机器人相连,在吊起待救人员后,通过缠绕机11释放钢丝绳23,避免蠕动机器人2与待救人员相撞;当蠕动机器人进入人员下方前进时采用蠕动前行方式,将人体逐渐托起;
42.当固定待救人员后,上方人员操作救援机器人1,通过与蠕动机器人1相连的绳索121,将蠕动机器人1与待救人员拉至水平管道与垂直管道拐角处。操作上方卷扬机,缓慢提起救援机器人1,可以有效安全地通过管道拐角,当上升至垂直管道足够高度时,待救人员完全进入垂直管道,则在此释放蠕动机器人2,远离待救人员,避免在上升的过程中,由于摆动造成待救人员与蠕动机器人2的碰撞,造成待救人员的二次伤害,提高救援工作效率,保证救援工作的顺利进行。
43.上述实施例仅示例性说明本发明的原理及其功效,而非用于限制本发明。任何熟悉此技术的人士皆可在不违背本发明的精神及范畴下,对上述实施例进行修饰或改变。因此,凡所属技术领域中具有通常知识者在未脱离本发明所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本发明的权利要求所涵盖。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1