一种仿人面部表情机器人头部的制作方法
[0001]
本发明用于机器人领域,特别是涉及一种仿人面部表情机器人头部。
背景技术:
[0002]
目前,关于仿人面部表情机器人实现理论和方法研究匮乏,绝大多数仿人面部表情机器人没有表情丰富的脸;少数有表情的面部表情机器人,面部表情僵硬,惊悚,不逼真。
技术实现要素:
[0003]
本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明提出一种仿人面部表情机器人头部,其面部表情丰富、逼真。
[0004]
本发明解决其技术问题所采用的技术方案是:一种仿人面部表情机器人头部,包括嘴部机构、鼻翼机构和眼部机构,所述嘴部机构和所述鼻翼机构均具有各自的舵机进行驱动,所述眼部机构包括眼球驱动装置和眼眉舵机,所述眼球驱动装置的动力输出端设有眼球传动装置,所述眼球传动装置与眼球模型连接,所述眼球驱动装置驱动所述眼球传动装置,以使所述眼球传动装置带动眼球模型多方位转动,所述眼眉舵机的动力输出端设有眼眉传动装置,所述眼眉舵机驱动所述眼眉传动装置,以使所述眼眉传动装置带动眼眉模型上下跳动。
[0005]
上述技术方案中至少具有如下优点或有益效果:在工作过程中,嘴部机构和鼻翼机构能够实现各自的嘴部表情动作和鼻翼表情动作,眼球驱动装置带动眼球做出多方位的转动,使得眼球实现的表情更加丰富逼真,而且眼眉模型还能够在眼眉传动装置的带动下进行上下跳动,使得机器人的面部表情更加丰富。
[0006]
进一步作为本发明技术方案的改进,所述嘴部机构包括嘴唇舵机,所述嘴唇舵机的动力输出端安装有嘴唇绞盘,所述嘴唇绞盘上缠绕有嘴唇柔索,所述嘴唇柔索的活动端用于连接嘴唇模型,所述嘴唇绞盘带动所述嘴唇柔索,以使所述嘴唇柔索拉动嘴唇模型实现抿嘴动作。
[0007]
进一步作为本发明技术方案的改进,所述嘴部机构还包括下颌板和下颌舵机,所述下颌舵机的动力输出端安装有下颌舵盘,所述下颌舵盘上安装有下颌连接件,所述下颌连接件与所述下颌板连接,所述下颌舵机驱动所述下颌舵盘,所述下颌舵盘带动下颌连接件转动,以使所述下颌连接件带动所述下颌板转动,从而做出张口或闭口的动作。
[0008]
进一步作为本发明技术方案的改进,所述仿人面部表情机器人头部还包括第一底板和第二底板,所述第一底板高于所述第二底板,所述第二底板高于所述下颌板,所述第二底板的下侧安装有上齿模型,所述下颌板的上侧安装有下齿模型,所述下颌板用于带动所述下齿模型运动,实现牙齿咬合或分开的动作。
[0009]
进一步作为本发明技术方案的改进,所述嘴部机构还包括嘴角舵机,所述嘴角舵机的动力输出端安装有嘴角舵盘,所述嘴角舵盘上铰接有嘴角驱动杆,所述嘴角驱动杆用于连接嘴角模型,所述嘴角驱动杆的中部铰接有拉杆装置,所述拉杆装置能够对所述嘴角
驱动杆形成支撑。
[0010]
进一步作为本发明技术方案的改进,所述鼻翼机构包括鼻翼舵机,所述鼻翼舵机的动力输出端安装有鼻翼绞盘,所述鼻翼绞盘上缠绕有鼻翼柔索,所述鼻翼柔索的活动端连接有鼻翼滑块,所述鼻翼滑块用于连接鼻翼模型,所述鼻翼柔索牵引所述鼻翼柔索,以使所述鼻翼柔索带动所述鼻翼滑块进行运动,实现鼻翼模型的提拉动作。
[0011]
进一步作为本发明技术方案的改进,所述眼部机构还包括眼睑舵机,所述眼睑舵机的动力输出端安装有眼睑舵机臂,所述眼睑舵机臂上铰接有眼睑连杆,所述眼睑连杆用于连接眼睑模型,所述眼睑舵机臂带动所述眼睑连杆运动,以使所述眼睑连杆带动眼睑模型在眼球模型上转动,实现眨眼动作。
[0012]
进一步作为本发明技术方案的改进,所述眼眉传动装置包括眼眉连杆和眼眉摇杆,所述眼眉舵机的动力输出端安装有眼眉舵机臂,所述眼眉连杆与所述眼眉舵机臂铰接,所述眼眉摇杆的一端与所述眼眉连杆铰接,所述眼眉摇杆的另一端安装有眼眉固定件,所述眼眉摇杆能够以所述眼眉摇杆的中部为轴心进行转动,以使所述眼眉固定件带动眼眉模型实现上下跳动。
[0013]
进一步作为本发明技术方案的改进,所述眼球驱动装置包括第一眼球舵机和第二眼球舵机,所述第一眼球舵机通过第一眼球舵机固定件安装在所述第一底板上,所述第二眼球舵机通过第二眼球舵机固定件安装在所述第一底板上,所述眼球传动装置包括第一眼球舵机臂和第二眼球舵机臂,所述第一眼球舵机臂安装在所述第一眼球舵机的动力输出端,所述第二眼球舵机臂安装在所述第二眼球舵机的动力输出端,所述第一眼球舵机臂上铰接有第一眼球连杆,所述第一眼球连杆用于带动眼球模型沿第一方向转动,所述第二眼球舵机臂上铰接有第二眼球连杆,所述第二眼球连杆用于带动眼球模型沿第二方向转动,其中所述第一方向与所述第二方向垂直。
[0014]
进一步作为本发明技术方案的改进,所述第二眼球舵机固定件能够沿所述第一方向转动,所述第一眼球连杆与所述第二眼球舵机固定件铰接,以使所述第一眼球连杆带动眼球模型沿第一方向转动的同时所述第二眼球连杆能够带动眼球模型沿所述第二方向转动。
附图说明
[0015]
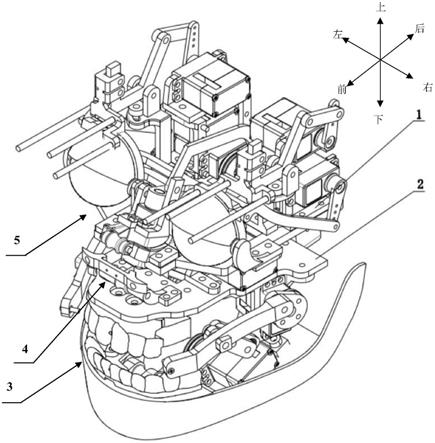
图1是本发明一个实施例结构示意图;
[0016]
图2是图1所示的一个实施例的部分结构示意图;
[0017]
图3是图1所示的一个实施例中用于驱动上唇模型的结构示意图;
[0018]
图4是图1所示的一个实施例中用于驱动嘴角模型的结构示意图;
[0019]
图5是图1所示的一个实施例中用于驱动下颌板的结构示意图;
[0020]
图6是图1所示的一个实施例中用于驱动下唇模型的结构示意图;
[0021]
图7是图1所示的一个实施例中用于驱动鼻翼模型的结构示意图;
[0022]
图8是图1所示的一个实施例中用于驱动眼眉模型的结构示意图;
[0023]
图9是图1所示的一个实施例中用于驱动眼睑模型的结构示意图;
[0024]
图10是图1所示的一个实施例中用于驱动眼球模型的结构示意图;
[0025]
图11是图1所示的一个实施例中眼球模型与的第二眼球连杆的连接关系示意图。
具体实施方式
[0026]
以下将结合实施例对本发明的构思及产生的技术效果进行清楚、完整地描述,以充分地理解本发明的目的、特征和效果。显然,所描述的实施例只是本发明的一部分实施例,而不是全部实施例,基于本发明的实施例,本领域的技术人员在不付出创造性劳动的前提下所获得的其他实施例,均属于本发明保护的范围。
[0027]
在本发明实施例的描述中,如果涉及到方位描述,例如“上”、“下”、“前”、“后”、“左”、“右”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
[0028]
在本发明实施例的描述中,如果某一特征被称为“设置”、“固定”、“连接”、“安装”在另一个特征,它可以直接设置、固定、连接在另一个特征上,也可以间接地设置、固定、连接、安装在另一个特征上。在本发明实施例的描述中,如果涉及到“若干”,其含义是一个以上,如果涉及到“多个”,其含义是两个以上,如果涉及到“大于”、“小于”、“超过”,均应理解为不包括本数,如果涉及到“以上”、“以下”、“以内”,均应理解为包括本数。如果涉及到“第一”、“第二”,应当理解为用于区分技术特征,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量或者隐含指明所指示的技术特征的先后关系。
[0029]
参见图1-图11,本发明的实施例提供了一种仿人面部表情机器人头部,其主要包括嘴部机构3、鼻翼机构4和眼部机构5,嘴部机构3和鼻翼机构4均具有各自的舵机进行驱动,眼部机构5包括眼球驱动装置和眼眉舵机502,眼球驱动装置的动力输出端设有眼球传动装置,眼球传动装置与眼球模型521连接,眼球驱动装置驱动眼球传动装置,以使眼球传动装置能够带动眼球模型521进行多方位转动,眼眉舵机502的动力输出端设有眼眉传动装置,眼眉舵机502驱动眼眉传动装置,以使眼眉传动装置带动眼眉模型上下跳动。
[0030]
在工作过程中,嘴部机构3和鼻翼机构4能够实现各自的嘴部表情动作和鼻翼表情动作,眼球驱动装置带动眼球做出多方位的转动,使得眼球实现的表情更加丰富逼真,而且眼眉模型还能够在眼眉传动装置的带动下进行上下跳动,使得机器人的面部表情更加丰富。
[0031]
参见图1、图10,具体的,仿人面部表情机器人头部包括第一底板1和第二底板2,第一底板1高于第二底板2,在一些实施例中,眼球驱动装置包括第一眼球舵机524和第二眼球舵机533,第一眼球舵机524通过第一眼球舵机固定件522安装在第一底板1的上侧,第二眼球舵机533通过第二眼球舵机固定件535安装在第一底板1,眼球传动装置包括第一眼球舵机臂525和第二眼球舵机臂534,第一眼球舵机臂525安装在第一眼球舵机524的动力输出端,第二眼球舵机臂534安装在第二眼球舵机533的动力输出端,第一眼球舵机臂525上铰接有第一眼球连杆523,第一眼球连杆523用于带动眼球模型521沿第一方向转动,第二眼球舵机臂534上铰接有第二眼球连杆531,第二眼球连杆531用于带动眼球模型521沿第二方向转动。
[0032]
参见图1、图10、图11,具体的,第一眼球舵机臂525带动第一眼球连杆523运动,使得第一眼球连杆523带动眼球模型521沿第一方向转动,使得眼球模型521做出沿第一方向转动的表情,其中第一方向为上下方向,第二眼球连杆531的两端分别通过眼球连接件532与两个眼球模型521铰接,第二眼球连杆531与眼球连接件532活动连接,眼球连接件532与
眼球模型521固定连接,第二眼球舵机533驱动第二眼球舵机臂534旋转,第二眼球舵机臂534带动第二眼球连杆531运动,使得第二眼球连杆531带动眼球模型521沿第二方向转动,从而使得两个眼球模型521做出沿第二方向转动的表情动作,其中第二方向为左右方向。
[0033]
参见图9,在一些实施例中,眼部机构5还包括眼睑舵机511,眼睑舵机511通过眼睑舵机固定件512安装在第一底板1上侧,眼睑舵机511的动力输出端安装有眼睑舵机臂513,眼睑舵机臂513上铰接有眼睑连杆514,眼睑连杆514用于连接眼睑模型515。
[0034]
参见图9、图10,具体的,眼球模型521的两侧分别设有眼睑模型定位座526,眼睑模型515的两端与眼睑模型定位座526铰接,且眼睑模型515扣在眼球模型521上方,在工作过程中,眼睑舵机511驱动眼睑舵机臂513旋转,眼睑舵机臂513带动眼睑连杆514传动,以使眼睑连杆514带动眼睑模型515环绕眼球模型521翻转,从而做出眨眼的动作表情。
[0035]
参见图10,在一些实施例中,第二眼球舵机固定件535能够在第一底板1上沿第一方向转动,第一眼球连杆523与第二眼球舵机固定件535铰接,这样在第二眼球连杆531带动眼球模型521沿第二方向转动的同时第一眼球连杆523还能够带动眼球模型521沿第一方向转动。
[0036]
具体的,第二眼球舵机固定件535设在两个眼球模型521之间,第二眼球舵机固定件535两侧分别与相邻的两个眼睑模型定位座526铰接,以使第二眼球舵机固定件535能够在第一底板1上沿第一方向转动,这样第一眼球连杆523能够带动第二眼球舵机固定件535、第二眼球舵机臂534、第二眼球连杆531以及位于第二眼球连杆531两端的眼球模型521一起上下转动,使得眼球模型521在左右转动的同时也能够上下转动,从而做出更加丰富的眼部动作。
[0037]
参见图8,在一些实施例中,眼眉舵机502与第一底板1通过眼眉舵机支撑架501连接,眼眉舵机502通过眼眉舵机固定件503安装在眼眉舵机支撑架501上,眼眉舵机502的动力输出端安装有眼眉舵机臂504,眼眉传动装置包括眼眉连杆505和眼眉摇杆506,眼眉连杆505的一端与眼眉摇杆506铰接,眼眉连杆505的另一端与眼眉舵机臂504铰接,眼眉摇杆506通过眼眉摇杆支撑架509与第一底板1连接,眼眉摇杆支撑架509上设有眼眉摇杆固定件507,眼眉摇杆506的中部与眼眉摇杆固定件507铰接,眼眉摇杆506的一端与眼眉连杆505铰接,眼眉摇杆506的另一端安装有眼眉固定件508,眼眉固定件508上用于安装眼眉模型。
[0038]
在工作过程中,眼眉舵机502驱动眼眉舵机臂504旋转,眼眉舵机臂504带动眼眉连杆505转动,眼眉连杆505带动眼眉摇杆506以眼眉摇杆固定件507为轴心转动,从而使得眼眉摇杆506带动眼眉固定件508实现上下移动,眼眉固定件508上下移动从而能够实现眼眉模型上下跳动。
[0039]
参见图7,在一些实施例中,鼻翼机构4包括鼻翼舵机406,鼻翼舵机406通过鼻翼舵机固定件401安装在第二底板2上侧,鼻翼舵机406的动力输出端安装有鼻翼绞盘407,鼻翼绞盘407上缠绕有鼻翼柔索405,鼻翼柔索405的活动端连接有鼻翼滑块403,鼻翼滑块403用于连接鼻翼模型,鼻翼柔索405牵引鼻翼滑块403,以使鼻翼滑块403带动鼻翼进行运动,实现鼻翼模型的提拉动作,具体的,第一底板1的前端设有第一鼻翼滚动杆404,第二底板2前端设有第二鼻翼滚动杆402,鼻翼柔索405的活动端先后绕过第二鼻翼滚动杆402和第一鼻翼滚动杆404将鼻翼滑块403吊在第一底板1与第二底板2之间,在工作过程中,鼻翼舵机406驱动鼻翼绞盘407转动,鼻翼绞盘407带动鼻翼柔索405拉动鼻翼滑块403上下运动,从而实
现鼻翼模型做出上下运动的表情动作。
[0040]
参见图5,在一些实施例中,嘴部机构3包括下颌板332和下颌舵机334,下颌板332位于第二底板2的下方,下颌舵机334通过下颌舵机固定件333安装在第一底板1下侧,下颌舵机334的动力输出端安装有下颌舵盘335,下颌舵盘335上安装有下颌连接件331,下颌连接件331向下延伸并与下颌板332连接,在下颌舵机334的驱动下,下颌舵盘335能够带动下颌连接件331进行转动,从而使得下颌连接件331带动下颌板332转动,实现张口动作。
[0041]
参见图2、图5,其中第二底板2的下侧安装有上齿模型304,上齿模型304位于第二底板2的前方,下颌板332的上侧安装有下齿模型328,下齿模型328位于下颌板332的前方,下颌板332能够带动下齿模型328运动,使得下齿模型328与上齿模型304咬合或分离,从而做出牙齿开合的动作。
[0042]
参见图3、图6,在一些实施例中,嘴唇舵机包括上唇舵机301和下唇舵机323,嘴唇绞盘包括上唇绞盘307和下唇绞盘327,嘴唇柔索包括上唇柔索306和下唇柔索326,上齿模型304的中部具有上齿通孔305,下齿模型328的中部具有下齿通孔325,上唇舵机301的动力输出端安装上唇绞盘307,上唇绞盘307上缠绕上唇柔索306,上唇柔索306的活动端用于连接上唇模型,下唇舵机323的动力输出端安装下唇绞盘327,下唇绞盘327上缠绕下唇柔索326,下唇柔索326的活动端用于连接下唇模型。
[0043]
具体的,上唇舵机301固定在第一底板1上侧,下唇舵机323通过下唇舵机固定件322固定在下颌板332上,第二底板2的下侧设有第一上唇滚轴303和第二上唇滚轴302,第一上唇滚轴303靠近上齿模型304,第二上唇滚轴302远离上齿模型304,上唇柔索306的活动端先后绕过第二上唇滚轴302和第一上唇滚轴303,并穿过上齿通孔305用于连接上唇模型,下颌板332靠近下齿模型328的一侧设有下唇滚轴324,下唇柔索326的活动端绕过下唇滚轴324,并穿过下齿通孔325用于连接下唇模型。在工作过程中,上唇绞盘307带动上唇柔索306,以使上唇柔索306拉动上唇模型运动,下唇绞盘327带动下唇柔索326,以使下唇柔索326拉动下唇模型运动,从而使得上唇模型与下唇模型相互运动做出抿嘴的动作。
[0044]
参见图4,在一些实施例中,嘴部机构3还包括嘴角舵机310,嘴角舵机310通过嘴角舵机固定件311安装在第二底板2的下侧,嘴角舵机310的动力输出端安装有嘴角舵盘313,嘴角舵盘313上铰接有嘴角驱动杆315,嘴角驱动杆315的一端用于连接嘴角模型,嘴角驱动杆315的中部铰接有拉杆装置,拉杆装置能够对嘴角驱动杆315形成支撑,
[0045]
具体的,拉杆装置包括第一拉杆314和第二拉杆312,其中嘴角驱动杆315的中部与第一拉杆314铰接,嘴角舵机固定件311与第二拉杆312铰接,第二拉杆312与第一拉杆314通过螺栓316连接。
[0046]
其中嘴角舵盘313为凸轮型结构,在工作过程中,嘴角舵机310带动嘴角舵盘313旋转,嘴角舵盘313带动嘴角驱动杆315前后运动,实现嘴角模型做出前后伸缩的动作,嘴角驱动杆315在前后运动过程中,中间的第一拉杆314能够对嘴角驱动杆315形成支撑,使得嘴角驱动杆315带动嘴角做出向上提拉的动作,从而使得嘴角做出微笑的表情动作。
[0047]
上面结合附图对本发明实施例作了详细说明,但是本发明不限于上述实施例,在所述技术领域普通技术人员所具备的知识范围内,还可以在不脱离本发明宗旨的前提下作出各种变化。此外,在不冲突的情况下,本发明的实施例及实施例中的特征可以相互组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1