用于机器人的模块化关节的制作方法
[0001]
本发明涉及机器人技术,特别涉及一种用于机器人的模块化关节。
背景技术:
[0002]
机器人通常利用末端的执行器来执行各类任务,并且,机器人可以利用其关节来调节执行器的位姿,以适配不同的任务需求。
[0003]
其中,机器人的末端的灵活度会影响执行器的位姿调节精度,因此,现有技术中尝试设计具有两个自由度的二自由度关节应用在机器人的末端。
[0004]
然而,用于机器人的二自由度关节通常都是以集成化的形态布置在机器人的末端骨架,不利于关节的灵活部署;而且,用于机器人的二自由度关节通常使用成本较高的谐波减速器,导致关节和机器人的成本较高。
技术实现要素:
[0005]
在一个实施例中,提供了一种用于机器人的模块化关节,有助于二自由度关节的模块化和低成本化,包括:
[0006]
关节连接座;
[0007]
双自由度减速模组,所述双自由度减速模组具有第一行星减速机构和第二行星减速机构;
[0008]
动力输出驱控模组,所述动力输出驱控模组具有与所述第一行星减速机构传动连接的第一动力机构、以及与所述第二行星减速机构传动连接的第二动力机构;
[0009]
其中,所述第一行星减速机构提供所述双自由度减速模组与所述关节连接座之间绕第一轴线转动的第一自由度,所述第二行星减速机构提供所述动力输出驱控模组与所述双自由度减速模组之间绕第二轴线转动的第二自由度,并且,所述第二轴线与所述第一轴线相交。
[0010]
可选地,所述动力输出驱控模组进一步具有用于控制所述第一动力机构和所述第二动力机构的控制模组。
[0011]
可选地,所述关节连接座具有与所述控制模组电连接的第一线路接头,并且所述第一线路接头通过贯穿所述第一行星减速机构的过线模组与所述控制模组电连接。
[0012]
可选地,所述动力输出驱控模组进一步具有与所述控制模组电连接的第二线路接头,所述第一线路接头与所述第二线路接头具有互补的插接结构。
[0013]
可选地,所述双自由度减速模组包括第一壳体,所述第一壳体承载所述第一行星减速机构和所述第二行星减速机构;所述动力输出驱控模组包括第二壳体,所述第二壳体承载所述第一动力机构和所述第二动力机构以及所述控制模组,并且,所述第二壳体具有耳板;其中,所述关节连接座在所述第一壳体沿所述第一轴线延伸的所述端部连接所述第一行星减速机构,并且,所述耳板在所述第一壳体沿所述第二轴线侧展的侧部连接所述第二行星减速机构。
[0014]
可选地,所述第一行星减速机构包括:第一动力输入轮,所述第一动力输入轮与所述第一动力机构传动连接;第一锥齿轮轴,所述第一锥齿轮轴沿所述第二轴线布置,并且所述第一锥齿轮轴与所述第一动力输入轮同轴装设;第二锥齿轮轴,所述第二锥齿轮轴沿所述第一轴线布置,并且所述第二锥齿轮轴与所述第一锥齿轮轴传动连接;第一齿圈,所述第一齿圈同轴环绕在所述第二锥齿轮轴的外周,并且所述第一齿圈集成于所述第一壳体的所述端部的内周;第一行星齿轮组,所述第一行星齿轮组啮合在所述第二锥齿轮轴与所述第一齿圈之间;第一行星架,所述第一行星架装设于所述第一行星齿轮组,并且所述第一行星架与所述关节安装座固定连接。
[0015]
可选地,所述第二行星减速机构包括:第二动力输入轮,所述第二动力输入轮与所述第二动力机构传动连接;柱齿轮轴,所述柱齿轮轴沿所述第二轴线布置,并且所述柱齿轮轴与所述第二动力输入轮同轴装设;第二齿圈,所述第二齿圈同轴环绕在所述柱齿轮轴的外周,并且所述第二齿圈与所述第二壳体的所述耳板固定连接;第二行星齿轮组,所述第二行星齿轮组啮合在所述柱齿轮轴与所述第二齿圈之间;第二行星架,所述第二行星架集成于所述第一壳体的所述侧部。
[0016]
可选地,所述关节连接座具有第一线路接头,所述第一线路接头通过过线模组与所述控制模组电连接,其中,所述过线模组的一部分位于折弯贯穿所述第一锥齿轮轴和所述第二锥齿轮轴的线束护管内,并且,所述过线模组的另一部分经由在所述第二壳体的外部与所述线束护管对接的线束护套穿入在所述第二壳体的内部。
[0017]
可选地,所述过线模组包括第一线束和第二线束、以及第一滑环和第二滑环,其中:所述第一滑环部署在所述线束护管邻接所述第一线路接头的端部,并且所述第一滑环连接所述第一线路接头;所述第二滑环部署在所述线束护管穿过所述第一壳体的侧部而暴露的端部;所述第一线束在所述线束护管内连接在所述第一滑环与所述第二滑环之间;所述第二线束经由所述线束护套穿入在所述第二壳体的内部,并且所述第二线束在所述线束护套与所述线束护管对接的端部连接所述第二滑环。
[0018]
可选地,所述线束护管通过护管支撑轴承被转动支撑在所述第一锥齿轮轴和所述第二锥齿轮轴中。
[0019]
基于上述实施例,模块化关节可以具有独立的模块形态,而不是必须依赖于在机器人骨架的集成,从而有助于关节的灵活部署;而且,模块化关节可以利用关节连接座和动力输出驱控模组之间的双自由度减速模组来提供方向不同的第一自由度和第二自由度,其中,由于双自由度减速模组使用比谐波减速器具有更低成本的第一行星减速机构和第二行星减速机构,因此,可以有助于二自由度的模块化关节的低成本化。
附图说明
[0020]
以下附图仅对本发明做示意性说明和解释,并不限定本发明的范围:
[0021]
图1a和图1b为本发明的一个实施例中用于机器人的模块化关节的结构示意图;
[0022]
图2为如图1a和图1b所示的模块化关节的分解结构示意图;
[0023]
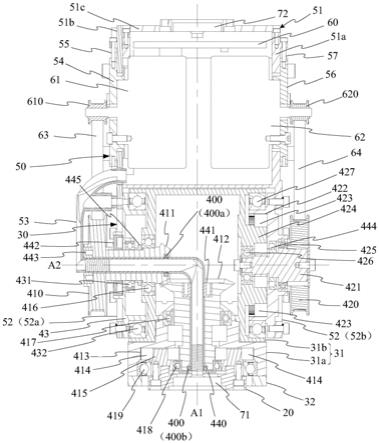
图3为如图1a和图1b所示的模块化关节的内部结构剖视图;
[0024]
图4为如图1a和图1b所示的模块化关节的行星减速机构的结构示意图;
[0025]
图5a和图5b为如图1a和图1b所示模块化关节的替代结构示意图;
[0026]
图6为如图1a和图1b所示的模块化关节的内部过线部署示意图;
[0027]
图7为如图1a和图1b所示的模块化关节的部署实例示意图。
[0028]
附图标记说明
[0029]
10、10
’ꢀꢀ
模块化关节
[0030]
20
ꢀꢀꢀꢀꢀꢀꢀꢀ
关节连接座
[0031]
30
ꢀꢀꢀꢀꢀꢀꢀꢀ
双自由度减速模组
[0032]
31
ꢀꢀꢀꢀꢀꢀꢀꢀ
第一壳体
[0033]
31a
ꢀꢀꢀꢀꢀꢀꢀ
第一筒壳
[0034]
31b
ꢀꢀꢀꢀꢀꢀꢀ
第二筒壳
[0035]
32
ꢀꢀꢀꢀꢀꢀꢀꢀ
端环
[0036]
40
ꢀꢀꢀꢀꢀꢀꢀꢀ
线束护管
[0037]
400
ꢀꢀꢀꢀꢀꢀꢀ
护管支撑轴承
[0038]
400a
ꢀꢀꢀꢀꢀ
第一护管支撑轴承
[0039]
400b
ꢀꢀꢀꢀꢀꢀ
第二护管支撑轴承
[0040]
41、41
’ꢀꢀ
第一行星减速机构
[0041]
410、410’第一动力输入轮
[0042]
411
ꢀꢀꢀꢀꢀꢀꢀ
第一锥齿轮轴
[0043]
412
ꢀꢀꢀꢀꢀꢀꢀ
第二锥齿轮轴
[0044]
413
ꢀꢀꢀꢀꢀꢀꢀ
第一齿圈
[0045]
414
ꢀꢀꢀꢀꢀꢀꢀꢀ
第一行星齿轮组
[0046]
415
ꢀꢀꢀꢀꢀꢀꢀꢀ
第一行星架
[0047]
416
ꢀꢀꢀꢀꢀꢀꢀꢀ
第一轴承
[0048]
417
ꢀꢀꢀꢀꢀꢀꢀꢀ
第二轴承
[0049]
418
ꢀꢀꢀꢀꢀꢀꢀꢀ
第三轴承
[0050]
419
ꢀꢀꢀꢀꢀꢀꢀꢀ
第四轴承
[0051]
42、42
’ꢀꢀꢀ
第二行星减速机构
[0052]
420、420
’ꢀ
第二动力输入轮
[0053]
421
ꢀꢀꢀꢀꢀꢀꢀꢀ
柱齿轮轴
[0054]
422
ꢀꢀꢀꢀꢀꢀꢀꢀ
第二齿圈
[0055]
423
ꢀꢀꢀꢀꢀꢀꢀꢀ
第二行星齿轮组
[0056]
424
ꢀꢀꢀꢀꢀꢀꢀꢀ
第二行星架
[0057]
425
ꢀꢀꢀꢀꢀꢀꢀꢀ
第五轴承
[0058]
426
ꢀꢀꢀꢀꢀꢀꢀꢀ
第六轴承
[0059]
427
ꢀꢀꢀꢀꢀꢀꢀꢀ
第七轴承
[0060]
43
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
从动轮板
[0061]
431
ꢀꢀꢀꢀꢀꢀꢀꢀ
第八轴承
[0062]
432
ꢀꢀꢀꢀꢀꢀꢀꢀ
第九轴承
[0063]
440
ꢀꢀꢀꢀꢀꢀꢀꢀ
挡片
[0064]
441
ꢀꢀꢀꢀꢀꢀꢀꢀ
第一密封圈
[0065]
442
ꢀꢀꢀꢀꢀꢀꢀꢀ
第二密封圈
[0066]
443
ꢀꢀꢀꢀꢀꢀꢀꢀ
第三密封圈
[0067]
444
ꢀꢀꢀꢀꢀꢀꢀꢀ
第四密封圈
[0068]
445
ꢀꢀꢀꢀꢀꢀꢀꢀ
套环
[0069]
50
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
动力输出驱控模组
[0070]
51
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第二壳体
[0071]
51a
ꢀꢀꢀꢀꢀꢀꢀꢀ
腔壳
[0072]
51b
ꢀꢀꢀꢀꢀꢀꢀꢀ
盖板
[0073]
51c
ꢀꢀꢀꢀꢀꢀꢀꢀ
端板
[0074]
52
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
耳板
[0075]
52a
ꢀꢀꢀꢀꢀꢀꢀꢀ
第一耳板
[0076]
52b
ꢀꢀꢀꢀꢀꢀꢀꢀ
第二耳板
[0077]
53、53
’ꢀꢀꢀ
线束护套
[0078]
54
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第一安装板
[0079]
55
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第一调节螺钉
[0080]
56
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第二安装板
[0081]
57
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第二调节螺钉
[0082]
60
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
控制模组
[0083]
61
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第一动力机构
[0084]
610、610
’ꢀ
第一动力输出轮
[0085]
62
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第二动力机构
[0086]
620、620
’ꢀ
第二动力输出轮
[0087]
63
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第一同步带
[0088]
64
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第二同步带
[0089]
65
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第一传动齿轮
[0090]
66
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第二传动齿轮
[0091]
71
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第一线路接头
[0092]
710
ꢀꢀꢀꢀꢀꢀꢀꢀ
过线模组
[0093]
711
ꢀꢀꢀꢀꢀꢀꢀꢀ
第一线束
[0094]
712
ꢀꢀꢀꢀꢀꢀꢀꢀ
第二线束
[0095]
713
ꢀꢀꢀꢀꢀꢀꢀꢀ
第一滑环
[0096]
714
ꢀꢀꢀꢀꢀꢀꢀꢀ
第二滑环
[0097]
72
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第二线路接头
[0098]
720
ꢀꢀꢀꢀꢀꢀꢀꢀ
腔内线束
[0099]
80
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
执行器
具体实施方式
[0100]
为使本发明的目的、技术方案及优点更加清楚明白,以下参照附图并举实施例,对本发明进一步详细说明。
[0101]
图1a和图1b为本发明的一个实施例中用于机器人的模块化关节的结构示意图。图2为如图1a和图1b所示的模块化关节的分解结构示意图。图3为如图1a和图1b所示的模块化关节的内部结构剖视图。请参见图1a和图1b并同时结合图2和图3,在该实施例中,用于机器人的模块化关节10可以包括关节连接座20、双自由度减速模组30以及动力输出驱控模组50。
[0102]
关节连接座20用于模块化关节10与其他部件的对接安装,例如,关节连接座20可以是例如法兰盘等易于可拆卸安装的元件。
[0103]
双自由度减速模组30可以具有第一行星减速机构41和第二行星减速机构42。例如,双自由度减速模组30可以包括第一壳体31,该第一壳体31可以承载第一行星减速机构41和第二行星减速机构42。在图1a和图1b以及图2和图3的图示中,以第一壳体31包括交叉固定拼接的第一筒壳31a(沿第一轴线a1延伸)和第二筒壳31b(沿与第一轴线a1相交的第二轴线a2侧展)为例,相应地,第一行星减速机构41可以布设在第一筒壳31a和第二筒壳32b,而第二行星减速机构42则可以只布设在第二筒壳32b,但实际实现第一关节30时也可以采用其他的壳体结构以及承载部署。
[0104]
动力输出驱控模组50可以具有与第一行星减速机构41传动连接的第一动力机构61、以及与第二行星减速机构42传动连接的第二动力机构62。例如,动力输出驱控模组50可以包括第二壳体51,第二壳体51承载第一动力机构61和第二动力机构62以及控制模组60,并且,第二壳体51具有耳板52,耳板52可以成对地形成在第二壳体51的相对两侧。例如,第二壳体51可以包括容纳第一动力机构61和第二动力机构62的腔壳51a、封盖腔壳51a的一侧的盖板51b、以及封盖腔壳51a背向第一壳体30的一端的端盖51c,其中一个耳板52(其可以称为第一耳板52a)可以形成于盖板51b,另一个耳板52(其可以称为第二耳板52b)则可以从腔壳51a与盖板51b所在侧相反的另一侧突出。
[0105]
其中,第一动力机构61和第二动力机构62可以包括内置编码器和制动器的伺服电机,并且,第一动力机构61和第二动力机构62可以不包括为伺服电机的闭环控制而额外配置的外置编码器(例如可以由控制模组60基于电流环控制使电机控制达到闭环)。
[0106]
在上述结构中,第一行星减速机构41可以提供双自由度减速模组30与关节连接座20之间绕第一轴线a1转动的第一自由度,例如,关节连接座20可以在双自由度减速模组30的第一壳体31沿第一轴线a1的端部(第一筒壳31a的端部)连接第一行星减速机构41;并且,第二行星减速机构42可以提供动力输出驱控模组50与双自由度减速模组30之间绕第二轴线a2转动的第二自由度,例如,动力输出驱控模组50的耳板52可以在双自由度减速模组30的第一壳体31沿第二轴线a2的侧部(第二筒壳31b的一端)连接第二行星减速机构42。
[0107]
基于上述实施例,模块化关节10可以具有独立的模块形态,而不是必须依赖于在机器人骨架的集成,例如可以替代机器人骨架(不限于末端)、或者通过与骨架的可拆卸装配而与骨架组合使用,从而有助于关节的灵活部署;而且,模块化关节10可以利用关节连接座20和动力输出驱控模组50之间的双自由度减速模组30来提供方向不同的第一自由度和第二自由度,其中,由于双自由度减速模组30使用比谐波减速器具有更低成本的第一行星减速机构41和第二行星减速机构42,因此,可以有助于二自由度的模块化关节10的低成本化,即,模块化关节10至少比使用谐波减速器的二自由度关节具有更低的成本。另外,包括第一动力机构61和第二动力机构62的模块化关节10还可以同时包括控制模组60,以减少模
块化关节10的外部接线。
[0108]
图4为如图1a和图1b所示的模块化关节的行星减速机构的结构示意图。
[0109]
请参见图4并同时回看图2和图3,第一行星减速机构41可以包括第一动力输入轮410、第一锥齿轮轴411、第二锥齿轮轴412、第一齿圈413、第一行星齿轮组414以及第一行星架415,以实现三级减速。
[0110]
第一动力输入轮410可以与第一动力机构61传动连接。例如,该第一动力输入轮410可以与装设在第一动力机构61的输出轴的第一动力输出轮610通过第一同步带63传动连接,即,第一级减速。
[0111]
其中,第一动力机构61可以通过第一安装板54装设在第二壳体51,该第一安装板54在第二壳体51的安装位置可以具有在第一同步带63的部署方向上存在预设的调节余量,通过第二壳体51的外壁装设的第一调节螺钉55,可以控制第一安装板54在调节余量的范围内的位置调节,以控制第一同步带63在第一动力输出轮610与第一动力输入轮410之间的张紧程度。
[0112]
第一锥齿轮轴411可以沿第二轴线a2布置,并且第一锥齿轮轴411可以与第一动力输入轮410同轴装设,以使第一动力机构61产生的力矩能够通过第一动力输入轮410而在第一锥齿轮轴411转换形成绕第二轴线a2的输入力矩,即,第二级减速。
[0113]
第二锥齿轮轴412沿第一轴线a1布置,并且第二锥齿轮轴412可以与第一锥齿轮轴411传动连接,以在第一锥齿轮轴411转换形成绕第二轴线a2的输入力矩转换为在第二锥齿轮轴412绕第一轴线a1的驱动力矩,即,第三级减速。例如,第二锥齿轮轴412的一端可以具有与第一锥齿轮轴411啮合的锥齿面,而另一端则可以具有用于对关节连接座20产生驱动输出的柱齿面。
[0114]
第一齿圈413可以同轴环绕在第二锥齿轮轴412的外周,并且第一齿圈413可以集成于第一壳体31在第一轴线a1方向上的端部(第一筒壳31a)的内周。
[0115]
第一行星齿轮组414可以啮合在第二锥齿轮轴412(例如前述的柱齿面)与第一齿圈413之间。
[0116]
第一行星架415可以装设于第一行星齿轮组414,并且第一行星架415可以与关节安装座20固定连接。
[0117]
从而,当第一动力机构61产生的力矩经过三级减速而驱动第一行星齿轮组414产生以第二锥齿轮轴412为太阳轮的行星运动时,装设于第一行星齿轮组414的第一行星架415可以相对于第一齿圈413绕第一轴线a1相对旋转,从而可以使得与第一行星架415固定连接的关节安装座20与第一齿圈413所在的第一壳体31(即双自由度减速模组30)之间形成绕第一轴线a1的相对旋转。
[0118]
可以理解的是,上述的减速级数仅仅是一个设计实例,而不应当构成对第一行星减速机构41的不必要的限制。例如,第一行星减速机构41自身的内部减速级数可以是一级或者多级。再例如,以第一动力输出轮610起算,第一行星减速机构41的减速级数可以根据需要设定为例如单级或除三级之外的其他级数。
[0119]
而且,第一锥齿轮轴411可以通过第一轴承416被第一壳体31(第二筒壳31b)可旋转地支撑,第二锥齿轮轴412可以通过第二轴承417被第一壳体31(第一筒壳31a)可旋转地支撑,第一行星架415与第二锥齿轮轴412之间可以通过第三轴承418转动配合,并且,第一
行星架415可以通过第四轴承419第一壳体31(第一筒壳31a)可旋转地支撑。
[0120]
另外,从图1a中可以看出,双自由度减速模组30还可以包括装设在第一壳体31(第一筒壳31a)在第一轴线a1方向上的端部的端环32,该端环32可以便于第一行星架415和关节安装座20以及第三轴承418和第四轴承419的拆装,并且有利于对关节安装座20形成周向防护。
[0121]
仍请参见图4并同时回看图2和图3,第二行星减速机构42可以包括第二动力输入轮420、柱齿轮轴421、第二齿圈422、第二行星齿轮组423以及第二行星架424,以实现两级减速。
[0122]
第二动力输入轮420可以与第二动力机构62传动连接。例如,该第二动力输入轮420可以与装设在第二动力机构62的输出轴的第二动力输出轮620通过第二同步带64传动连接,即,第一级减速。
[0123]
与第一动力机构61同理,第二动力机构62可以通过第二安装板56装设在第二壳体51,该第二安装板56在第二壳体51的安装位置可以具有在第二同步带64的部署方向上存在预设的调节余量,通过第二壳体51的外壁装设的第二调节螺钉57,可以控制第二安装板56在调节余量的范围内的位置调节,以控制第二同步带64在第二动力输出轮620与第二动力输入轮420之间的张紧程度。
[0124]
柱齿轮轴421可以沿第二轴线a2布置,并且柱齿轮轴421可以与第二动力输入轮420同轴装设,以使第二动力机构62产生的力矩能够通过第二动力输入轮420而在柱齿轮轴421转换形成绕第二轴线a2的输入力矩,即,第二级减速。
[0125]
第二齿圈422可以同轴环绕在柱齿轮轴421的外周,并且第二齿圈422可以与第二壳体51的耳板52固定连接。
[0126]
第二行星齿轮组423可以啮合在柱齿轮轴421与第二齿圈422之间。
[0127]
第二行星架424可以集成于第一壳体31(第二筒壳31b)在第二轴线a2方向上的一侧的侧部。
[0128]
从而,当第二动力机构62产生的力矩经过两级减速而驱动第二行星齿轮组423产生以柱齿轮轴421为太阳轮的行星运动时,装设于第二行星齿轮组423的第二行星架424可以相对于第二齿圈422绕第二轴线a2相对旋转,从而可以使得集成了第二行星架424的第一壳体31(即双自由度减速模组30)与固定连接第一齿圈413的耳板52(即动力输出驱控模组50)之间形成绕第二轴线a2的相对旋转。
[0129]
可以理解的是,上述的减速级数仅仅是一个设计实例,而不应当构成对第二行星减速机构42的不必要的限制。例如,第二行星减速机构42自身的内部减速级数可以是一级或者多级。再例如,以第二动力输出轮620起算,第二行星减速机构42的减速级数可以根据需要设定为单级或不同于两级的其他级数。
[0130]
而且,柱齿轮轴421可以通过第五轴承425与第二齿框422转动配合、并通过第六轴承426被第一壳体31(第二筒壳31b)可旋转地支撑,并且,第二齿框422可以通过第七轴承427被第一壳体31(第一筒壳31a)可旋转地支撑。
[0131]
对于在单关节实现双自由度的模块化关节10而言,当基于第二行星减速机构42实现双自由度减速模组30与动力输出驱控模组50之间绕第二轴线a2的第二自由度的相对旋转时,第一行星减速机构41中的第一锥齿轮轴411也有可能会由于双自由度减速模组30绕
第二轴线a2的摆动而被动旋转,此时容易引发关节安装座20与双自由度减速模组30之间绕第一轴线a1的第一自由度的附带旋转,为了避免这样的不期望发生的附带旋转,控制模组60可以在控制第二动力机构62驱动第而自由度的相对旋转时,同时控制第一动力机构61对第一行星减速机构41产生用于消除附带旋转的动力补偿,以实现运动解耦。
[0132]
另外,为了提高双自由度减速模组30与动力输出驱控模组50之间的第二自由度的连接强度,第二壳体50的耳板52可以在第二轴线a2的方向上成对地间隔布置,其中一个耳板52可以按照如前述方式在第一壳体30的一侧侧部连接第二行星减速机构42的第二齿圈422,而另一个耳板53则可以通过从动轮板43转动装设在在第二壳体30的另一侧侧部,例如,该从动轮板43与第一锥齿轮轴411之间可以通过第八轴承431转动配合、并且通过第九轴承432被第一壳体31(第二筒壳31b)可旋转地支撑。
[0133]
可以理解的是,对于为模块化关节10提供双自由度的第一行星减速机构41和第二行星减速机构42来说,与第一动力机构61和动力第二动力机构62之间的传动方式,不应当被认为必须局限于基于第一同步带61和第二同步带62的带传动方式,而是也可以支持诸如齿轮传动等其他方式。
[0134]
图5a和图5b为如图1a和图1b所示模块化关节的替代结构示意图。请参见图5a和图5b,作为模块化关节10’的一种替代方式,第一行星减速机构41’的第一动力输入轮410’可以通过第一传动齿轮65与装设在第一动力机构61的输出轴的第一动力输出轮610’传动连接,同理,第二第行星减速机构42’的第二动力输入轮420’可以通过第二传动齿轮66与装设在第二动力机构62的输出轴的第二动力输出轮620’传动连接。
[0135]
还可以理解的是,图1a和图1b以及图5a和图5b所示的结构都采用第一动力机构61和第二动力机构62的输出轴均沿第二轴线a2布置,但第一动力机构61和第二动力机构62的输出轴的布设方向也可以彼此不同、并且可以通过进一步引入传动元件而允许布置在偏离第二轴线a2的任意方向上。
[0136]
请再回看图1a和图1b、或图5a和图5b,关节连接座20可以具有与控制模组60电连接的第一线路接头71,并且,动力输出驱控模组50可以具有与控制模组60电连接的第二线路接头72。例如,第一线路接头71和第二线路接头72与控制模组60之间的电连接可以包括电源线和信号线的两类线路。
[0137]
在关节连接座20和动力输出驱控模组50还分布部署与控制模组60电连接的第一线路接头71和第二线路接头72的情况下,可以有助于避免部署外部引线。
[0138]
图6为如图1a和图1b所示的模块化关节的内部过线部署示意图。请参见图6并同时回看图2和图3,第一线路接头71可以通过过线模组710与控制模组60电连接。
[0139]
其中,过线模组710的一部分可以位于贯穿第一行星减速机构41(折弯贯穿第一锥齿轮轴411和第二锥齿轮轴412)的线束护管40内。
[0140]
例如,该线束护管40可以呈折弯状、且折弯的两部分分别穿透第一锥齿轮轴411和第二锥齿轮轴412,并且,线束护管40通过护管支撑轴承400而与第一锥齿轮轴411和第二锥齿轮轴412转动配合,以被转动支撑在第一锥齿轮轴411和第二锥齿轮轴412中,从而可以弱化甚至消除第一行星减速机构41的运动对过线模组710的扭转。例如,线束护管40与第一锥齿轮轴411之间的护管支撑轴承400可以被称为护管支撑轴承400a,线束护管40与第二锥齿轮轴412之间的护管支撑轴承400可以被称为第二护管支撑轴承400b。
[0141]
而且,过线模组710的另一部分可以经由在第二壳体51的外部与线束护管40对接的线束护套53或53’而穿入在第二壳体51的内部。
[0142]
例如,过线模组710可以包括第一线束711和第二线束712、以及第一滑环713和第二滑环714,其中:
[0143]
第一滑环713可以部署在线束护管40邻接第一线路接头71的端部,并且第一滑环713可以连接第一线路接头71;
[0144]
第二滑环714可以部署在线束护管40穿过第一壳体31(第二筒壳31b)的侧部而暴露的端部,例如在第二壳体51的耳部52暴露。
[0145]
第一线束711可以在线束护管40内连接在第一滑环713与第二滑环714之间。
[0146]
第二线束712可以经由线束护套53(槽状)或线束护套53’(管状)穿入在第二壳体51的内部,并且第二线束712在线束护套53(槽状)或线束护套53’(管状)与线束护管(40)对接的端部连接第二滑环714。
[0147]
由此,过线模组710基于第一滑环713和第二滑环714的扭转释放,可以减少第一线束711和第二线束712由于第一自由度和第二自由度的相对旋转而产生的扭转及摩擦损耗。
[0148]
另外,在线束护管40途经的布设路径中:
[0149]
线束护管40与第二锥齿轮轴412之间还可以通过第一套环441形成具有密封作用的同轴支撑;
[0150]
第一锥齿轮轴411与其所在侧的从动轮板43之间还可以通过第二密封圈442形成具有密封作用的同轴支撑;
[0151]
线束护管40位于第一动力输入轮410处的端部与第一动力输入轮410之间可以通过第三密封圈443形成具有密封效果的同轴支撑;
[0152]
第一轴承416和第八轴承431之间可以通过套设于第一锥齿轮轴411的套环445形成轴向限位;
[0153]
线束护管40位于关节连接座20处的另一端部可以套设有对第三轴承418形成轴向限位的挡片440。
[0154]
而且,柱齿轮轴421与其所在一侧的耳板52之间,可以通过第四密封圈444形成具有密封效果的同轴支撑。
[0155]
请再参见图6并同时回看图2和图3,第二壳体51可以装设有通过第三线束720与控制模组60电连接的第二线路接头72,例如,第二线路接头72可以布置在第二壳体51沿第一轴线a1背向双自由度减速模组30的端板51c,该端板51c可以将控制模组60封盖在第二壳体51的腔壳51a的内部,并且,为了对第二线路接头72提供在第一轴线a1方向上的插接操作余量,第二线路接头72可以浮动装设在第二壳体51,即,第二线路接头72在第二壳体51(端板51c)的装设位置具有相对于控制模组60的位移缓冲。
[0156]
另外,第一线路接头71与第二线路接头72可以具有互补的插接结构,例如,在图1a和图1b以及图5a和图5b所示的结构中,第一线路接头71被设置为公头、第二线路接头72被设置为母头。
[0157]
若第一线路接头71与第二线路接头72具有互补的插接结构,则还可以实现多个模块化关节10或10’的快速拆装,由此可以有利于降低机器人的装配成本并提高机器人的装配效率。
[0158]
图7为如图1a和图1b所示的模块化关节的部署实例示意图。请参见图7,多个模块化关节10通过关节连接座20的第一线路接头71与动力输出驱控模组50的第二线路接头72的插接级联,可以无需外部引线即可组装形成末端安装执行器80的多关节机械臂,从而有助于缩短机器人的研发周期、降低装配成本。
[0159]
可以理解的是,虽然图7中都以相同的多模块化关节10来进行视图表达,但在实际设计时,可能存在采用上述实施例的设计原理的不同规格的模块化关节,此时,只要第一线路接头71与第二线路接头72具有互补的插接结构,都可以按照如图7所示的级联方式组装形成不同规格的机械臂。
[0160]
而且,模块化关节10之间的连接方式还可以进一步引入螺栓固定、螺纹连接、快换机构等辅助连接。
[0161]
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明保护的范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1