一种适用狭窄空间作业的铰接式移动机器人的制作方法
1.本发明涉及移动机器人技术领域,特别涉及一种适用狭窄空间作业的铰接式移动机器人。
背景技术:
2.在一些强辐射场等人员无法达到区域,要想进行防护操作及探查任务需要通过机器人实现。目前,所设计的固定履带式移动机器人,虽然与轮式底盘相比其越障性能明显增强,但是越障性能相对还是具有局限性;摆臂履带式移动机器人结构复杂,空间利用率低。因此,急需一种结构紧凑,负载能力大,有很强的越障能力的移动机器人。
技术实现要素:
3.针对上述问题,本发明的目的在于提供一种适用狭窄空间作业的铰接式移动机器人,该铰接式移动机器人结构紧凑,负载能力大,有很强的越障能力。
4.为了实现上述目的,本发明采用以下技术方案:
5.一种适用狭窄空间作业的铰接式移动机器人,包括驱动控制舱、铰接传动系统、供电舱、行走系统及机械手,其中驱动控制舱和供电舱通过铰接传动系统连接,所述机械手设置于所述铰接传动系统上,并且与所述铰接传动系统连接;所述铰接传动系统用于驱动所述供电舱及所述机械手摆动;所述行走系统设置于所述驱动控制舱和所述供电舱的两侧,所述驱动控制舱用于控制所述行走系统运动;所述供电舱给移动机器人提供动力。
6.所述铰接传动系统包括电池舱摆臂电机箱体、铰接轴、齿轮传动机构ⅰ、齿轮传动机构ⅱ、机械手摆臂电机、机械手摆臂电机箱体及电池舱摆臂电机;
7.所述电池舱摆臂电机箱体与所述驱动控制舱连接,所述齿轮传动机构ⅰ、齿轮传动机构ⅱ、铰接轴及电池舱摆臂电机设置于所述电池舱摆臂电机箱体内,并且所述铰接轴可转动,所述电池舱摆臂电机通过齿轮传动机构ⅱ与所述铰接轴传动连接,所述铰接轴与所述供电舱连接;
8.所述机械手摆臂电机箱体与所述铰接轴转动连接;所述机械手摆臂电机设置于所述机械手摆臂电机箱体内,并且通过齿轮传动机构ⅰ与所述铰接轴连接,所述机械手设置于所述机械手摆臂电机箱体上。
9.所述铰接轴的两端穿出所述电池舱摆臂电机箱体,并且与所述行走系统连接。
10.所述铰接轴通过转接法兰盘与所述供电舱连接。
11.所述供电舱的两侧分别设有与所述转接法兰盘连接的延伸臂,所述机械手摆臂电机箱体位于两个所述延伸臂之间。
12.所述齿轮传动机构ⅰ包括小锥齿轮ⅰ和大锥齿轮ⅰ,其中大锥齿轮ⅰ键连接在所述铰接轴上,所述小锥齿轮ⅰ安装在所述机械手摆臂电机的输出端,并且与所述大锥齿轮ⅰ啮合,所述机械手摆臂电机驱动所述小锥齿轮ⅰ转动,从而通过所述小锥齿轮ⅰ带动所述机械手摆臂电机箱体及所述机械手前后摆动。
13.所述齿轮传动机构ⅱ包括小锥齿轮ⅱ和大锥齿轮ⅱ,其中大锥齿轮ⅱ套设于所述铰接轴上,并且与所述铰接轴键连接,所述小锥齿轮ⅱ安装在所述电池舱摆臂电机的输出轴上,并且与所述大锥齿轮ⅱ啮合;所述电池舱摆臂电机通过所述齿轮传动机构ⅱ驱动所述铰接轴转动,从而带动所述供电舱摆动。
14.所述行走系统包括驱动轴、驱动轮、驱动履带、双排带轮、从动履带、从动轴及从动带轮,其中双排带轮可转动地连接在所述铰接轴上;所述驱动轴可转动地连接在所述驱动控制舱上,所述驱动轮连接在所述驱动轴上,并且通过驱动履带与所述双排带轮传动连接;
15.所述从动轴可转动地连接在所述供电舱上,所述从动带轮连接在所述从动轴上,并且通过所述从动履带与所述双排带轮传动连接。
16.所述驱动控制舱包括驱动控制舱体及安装在所述驱动控制舱体内的控制元器件和两个驱动电机,其中控制元器件与两个驱动电机电连接,两个驱动电机分别与位于所述驱动控制舱两侧的所述行走系统连接。
17.所述供电舱包括电池舱体及设置于所述电池舱体内的电池。
18.本发明的优点及有益效果是:
19.本发明提供的一种适用狭窄空间作业的铰接式移动机器人,应用于核应急等狭窄作业空间领域,铰接式履带底盘结构紧凑,负载能力大;通过铰接轴转动抬高机器人前舱体可实现越障和攀爬楼梯;底盘上搭载的机械手,可实现清除障碍、开关门及抓取功能,也可搭载卷线桶实现有线供电,还可搭载其他检测设备来适用不同作业场合。
附图说明
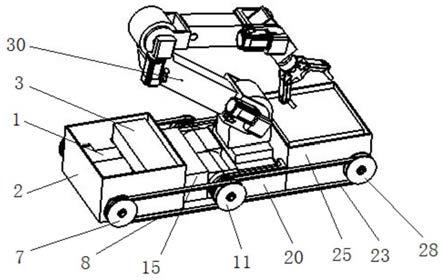
20.图1为本发明适用狭窄空间作业的铰接式移动机器人的结构示意图;
21.图2为本发明中驱动控制舱的结构示意图;
22.图3为本发明中铰接传动系统的结构示意图;
23.图4为本发明中供电舱的结构示意图;
24.图5为本发明适用狭窄空间作业的铰接式移动机器人爬台阶障碍物的示意图。
25.图中:1、驱动电机,2、驱动控制舱体,3、控制元器件,4、驱动轴轴承,5、驱动轴,6、驱动轮锁紧螺母,7、驱动轮,8、驱动履带,9、铰接轴锁紧螺母,10、圆锥滚子轴承,11、双排带轮,12、转接法兰盘,13、小铜套,14、大铜套,15、电池舱摆臂电机箱体,16、铰接轴,17、小锥齿轮ⅰ,18、大锥齿轮ⅰ,19、机械手摆臂电机,20、机械手摆臂电机箱体,21、深沟球轴承,22、角接触球轴承,23、从动履带,24、电池,25、电池舱体,26、带座轴承,27、从动轴,28、从动带轮,29从动轴锁紧螺母,30、机械手,31、台阶障碍物,32、电池舱摆臂电机,33、齿轮箱,34、小锥齿轮ⅱ,35、大锥齿轮ⅱ,36、延伸臂。
具体实施方式
26.为了使本发明的目的、技术方案和优点更加清楚,下面结合附图和具体实施例对本发明进行详细描述。
27.如图1所示,本发明提供的一种适用狭窄空间作业的铰接式移动机器人,包括驱动控制舱、铰接传动系统、供电舱、行走系统及机械手30,其中驱动控制舱和供电舱通过铰接传动系统连接,机械手30设置于铰接传动系统上,并且与铰接传动系统连接,铰接传动系统
用于驱动供电舱及机械手30摆动。行走系统设置于驱动控制舱和供电舱的两侧,驱动控制舱用于控制行走系统运动,供电舱为移动机器人提供动力。
28.如图2所示,本发明的实施例中,驱动控制舱包括驱动控制舱体2及设置于驱动控制舱体2内的控制元器件3和两个驱动电机1,其中控制元器件3与两个驱动电机1电连接,两个驱动电机1分别与位于驱动控制舱两侧的行走系统连接。
29.如图3所示,本发明的实施例中,铰接传动系统包括电池舱摆臂电机箱体15、铰接轴16、齿轮传动机构ⅰ、齿轮传动机构ⅱ、机械手摆臂电机19、机械手摆臂电机箱体20及电池舱摆臂电机32,其中电池舱摆臂电机箱体15与驱动控制舱连接,齿轮传动机构ⅰ、齿轮传动机构ⅱ、铰接轴16及电池舱摆臂电机32设置于电池舱摆臂电机箱体15内,并且铰接轴16可转动,电池舱摆臂电机32通过齿轮传动机构ⅱ与铰接轴16传动连接,铰接轴16与供电舱连接;机械手摆臂电机箱体20与供电舱转动连接,机械手摆臂电机19设置于机械手摆臂电机箱体20内,并且通过齿轮传动机构ⅰ与铰接轴16连接,机械手30连接在机械手摆臂电机箱体20的顶部。机械手摆臂电机19通过齿轮传动机构ⅰ驱动机械手摆臂电机箱体20及机械手30摆动。
30.进一步地,铰接轴16的两端穿出电池舱摆臂电机箱体15与行走系统连接,铰接轴16通过转接法兰盘12与供电舱连接。
31.如图4所示,本发明的实施例中,供电舱包括电池舱体25及设置于电池舱体25内的电池24。进一步地,电池舱体25的两侧分别设有与转接法兰盘12连接的延伸臂36,机械手摆臂电机箱体20位于两个延伸臂36之间,并且通过深沟球轴承21与铰接轴16转动连接。
32.具体地,如图3所示,齿轮传动机构ⅰ包括小锥齿轮ⅰ17和大锥齿轮ⅰ18,其中大锥齿轮ⅰ18连接在铰接轴16上,并且与铰接轴16键连接;小锥齿轮ⅰ17与机械手摆臂电机19的输出端连接,并且与大锥齿轮ⅰ18啮合。机械手摆臂电机19驱动小锥齿轮ⅰ17转动,当大锥齿轮ⅰ18与铰接轴16固定不动时,小锥齿轮ⅰ17绕大锥齿轮ⅰ18转动,从而带动机械手摆臂电机箱体20和机械手30摆动。
33.具体地,如图3所示,齿轮传动机构ⅱ包括小锥齿轮ⅱ34和大锥齿轮ⅱ35,其中大锥齿轮ⅱ35键连接在铰接轴16上小锥齿轮ⅱ34与电池舱摆臂电机32的输出轴连接,并且与大锥齿轮ⅱ35啮合。电池舱摆臂电机32驱动小锥齿轮ⅱ34转动,小锥齿轮ⅱ34通过大锥齿轮ⅱ35带动铰接轴16转动,从而带动供电舱一起转动。
34.铰接传动系统主要实现供电舱及机械手30的前后摆动,完成越障和攀爬楼梯运动。机械手30实现清除障碍、开关门及抓取功能,也可搭载卷线桶实现有线供电,还可搭载其他检测设备来适用不同作业场合。
35.如图2、图4所示,本发明的实施例中,行走系统包括驱动轴5、驱动轮7、驱动履带8、双排带轮11、从动履带23、从动轴27及从动带轮28,其中双排带轮11通过可转动地套设于铰接轴16上;驱动轴5可转动地设置于驱动控制舱体2上,驱动轮7连接在驱动轴5上,并且通过驱动履带8与双排带轮11传动连接;从动轴27可转动地连接在供电舱的电池舱体25上,从动带轮28套设于从动轴27上,并且通过从动履带23与双排带轮11传动连接。
36.本发明的工作原理是:
37.机器人直线行驶时,驱动控制舱的两个驱动电机1转速相同;转弯时,驱动控制舱的两个驱动电机1转速不同,实现转向;机器人底盘上搭载机械手30,实现开关门及物件拾
取等作业。
38.当遇到障碍物时,铰接传动系统后侧的电池舱摆臂电机32通过齿轮传动机构ⅱ带动铰接轴16转动,铰接轴16通过键与转接法兰盘12连接,转接法兰盘12通过螺钉与电池舱体25连接,最终实现电池舱摆臂电机32带动供电舱摆动,供电舱抬高实现越障,如图5所示。
39.当机器人爬楼梯时,铰接传动系统后侧的电池舱摆臂电机32启动抱闸,此时铰接轴16不转,铰接传动系统前侧的机械手摆臂电机19带动小锥齿轮ⅰ17转动,实现小锥齿轮ⅰ17围绕与其连接的大锥齿轮ⅰ18转动,从而实现机械手30前后摆动,调节整车重心前后位置,利于攀爬楼梯。
40.本发明的铰接式移动机器人特别适合在狭窄空间作业,机器人底盘采用铰接传动,结构紧凑,空间利用率高,负载能力大,有很强的越障能力。同时机器人底盘上搭载机械手,可实现清除障碍、开关门及抓取功能;也可搭载卷线桶实现有线供电,还可搭载其它检测设备来适用不同作业场合。
41.以上所述仅为本发明的实施方式,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内所作的任何修改、等同替换、改进、扩展等,均包含在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1