机器人的控制装置、机器人的控制方法及协同作业单元与流程
1.本发明涉及一种搭载于运输车的机器人的控制装置及控制方法、以及具备运输车及搭载于运输车的机器人的协同作业单元。
背景技术:
2.已知有一种协同作业单元,具备:与人协同的机器人;以及搭载有该机器人的运输车。该协同作业单元例如是日本专利特开2016-032858号公报的“机器人100”。该“机器人100”基于是否有意想不到的外力施加于自己来判断是否与人接触。
技术实现要素:
发明要解决的问题
3.机器人和运输车的各方存在被控制成在机器人与障碍物接触时停止的情况。在该情况下,机器人的控制装置有时会将运输车通过台阶而产生的外力识别成与障碍物接触而产生的外力。其结果是,运输车在试图通过台阶时被控制成停止,从而导致运输车无法通过台阶。
4.因此,本发明涉及一种具备运输车和搭载于运输车的机器人的协同作业单元,其目的在于,提供一种能够抑制运输车在通过台阶时停止的机器人的控制装置、机器人的控制方法及协同作业单元。解决问题的技术手段
5.本发明的一个形态是机器人的控制装置,其基于施加到搭载于运输车的所述机器人的外力使所述机器人停止,具备:判定部,其对所述运输车是否在行驶中进行判定;以及控制部,在所述运输车在行驶中的情况下,所述控制部使所述机器人停止,在所述运输车不在行驶中的情况下,所述控制部使所述机器人能够动作。
6.本发明的另一个形态是协同作业单元,其具备:上述形态的机器人的控制装置;机器人,其由所述控制装置控制;以及运输车,其搭载有所述控制装置和所述机器人。
7.本发明的另一个形态是机器人的控制方法,所述机器人搭载于运输车,该控制方法包括:判定步骤,对所述运输车是否在行驶中进行判定;机器人动作步骤,在所述运输车不在行驶中时,使所述机器人能够动作,并且,基于施加到所述机器人的外力对是否存在异常进行检测;以及机器人停止步骤,在所述运输车在行驶中的情况下、或者检测到所述异常的情况下,使所述机器人停止。发明的效果
8.根据本发明,能够提供一种能够抑制运输车在通过台阶时停止的机器人的控制装置、机器人的控制方法及协同作业单元。
9.根据参考附图而进行说明的以下实施方式的说明,将容易地了解上述的目的、特征及优点。
附图说明
10.图1是第一实施方式的协同作业单元的整体构成图。图2是第一实施方式的机器人的控制装置的功能构成图。图3是表示第一实施方式的机器人的控制方法的一例的流程图。图4是第二实施方式的协同作业单元的整体构成图。图5是第二实施方式的机器人的控制装置的功能构成图。图6是表示第二实施方式的机器人的控制方法的一例的流程图。图7是第三实施方式的协同作业单元的整体构成图。图8是第三实施方式的机器人的控制装置的功能构成图。图9是表示第三实施方式的机器人的控制方法的一例的流程图。
具体实施方式
11.以下,一边列举优选的实施方式并参照附图,一边详细地对本发明的机器人的控制装置、机器人的控制方法及协同作业单元进行说明。
12.[第一实施方式]图1是第一实施方式的协同作业单元10的整体构成图。
[0013]
协同作业单元10例如在制造工业产品的工厂中自身一边移动一边与人协同进行作业。协同作业单元10具备机器人12、机器人12的控制装置14、以及搭载有机器人12和控制装置14的运输车16。需要说明的是,在以下,在指“机器人12的控制装置14”时仅记载为“控制装置14”。
[0014]
本实施方式的机器人12是具有多个关节部的机器人臂。另外,本实施方式的运输车16通过行驶实现协同作业单元10的移动,通常也称为“无人运输车”、“agv(automated guided vehicle:自动导引运输车)”。由于这样的机器人12以及运输车16各自本身是已知的,因此在以下适当地省略其说明。
[0015]
机器人12所具有的多个关节部通过马达18的驱动而进行动作。马达18例如是伺服马达。马达18由通过未图示的馈电电路和放大器(增幅器)从控制装置14供应的驱动电流进行驱动。另外,在机器人12中设有传感器20,该传感器20对施加到该机器人12的外力f进行检测。
[0016]
传感器20设置在关节部的马达18,从而基于从控制装置14供应到马达18的驱动电流、马达18的旋转轴的旋转扭矩对外力f进行检测。另外,传感器20将与检测到的外力f相应的信号输出至控制装置14的监视部32(稍后描述)。
[0017]
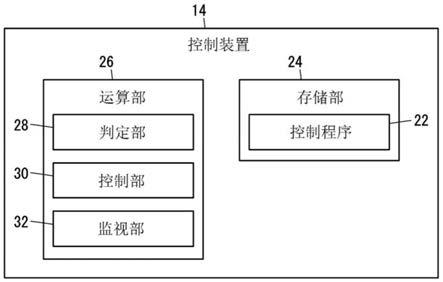
图2是第一实施方式的机器人12的控制装置14的功能构成图。
[0018]
控制装置14基于规定的控制程序22对机器人12进行控制。控制装置14具备存储部24和运算部26。
[0019]
存储部24在构成中包括例如rom(read only memory)、ram(random access memory)作为硬件。在存储部24中存储上述的规定的控制程序22。
[0020]
运算部26在构成中包括例如cpu(central processing unit)作为硬件。运算部26通过执行存储部24所存储的规定的控制程序22来实现机器人12的控制。与此相关地,运算部26具备判定部28、控制部30和监视部32。这些部分通过运算部26与存储部24协同执行控
制程序22来实现。以下,将按照顺序对此进行说明。
[0021]
判定部28对运输车16是否在行驶中进行判定。具体如何进行判定没有特别的限定。举例说明的话,例如,判定部28可以通过从运输车16接收表示运输车16是否在行驶中的信号来进行判定。或者,判定部28可以从设置于运输车16的速度传感器接收表示运输车16的行驶速度的信号来进行判定。或者,判定部28可以通过将gps(global positioning system,全球定位系统)应用于协同作业单元10来依次获取协同作业单元10的当前位置,并且基于该获取的位置的变化进行判定。
[0022]
基于判定部28的判定的结果,在运输车16在行驶中的情况下,控制部30使机器人12停止,在运输车16不在行驶中的情况下,控制部30使机器人12能够动作。在此,优选在运输车16在行驶中的情况下,控制部30切断向机器人12的电力供给。由此,能够更可靠地使机器人12停止。在使机器人12能够动作时,使电力供应返回到能够重新打开的状态即可。
[0023]
切断向机器人12的电力供给是指,即切断向马达18的驱动电流的供给。这可以通过在向马达18供应驱动电流的电线中插入开关元件并且将该开关元件切换成断开来容易地实现。
[0024]
另外,虽然将另行稍后描述,但有时也从监视部32将机器人12存在异常的主旨通知给控制部30。当从监视部32接收到该通知时,控制部30迅速使机器人12停止(固定机器人12的姿势)。
[0025]
表示外力f的信号从传感器20输入到监视部32。监视部32基于该信号监视是否对作业中的机器人12施加了异常外力f。外力f是否异常基于该外力f是否超过预先确定的阈值vth来进行判断。阈值vth是基于控制程序假定施加到正常作业的机器人的外力f的大小而确定的。另外,当监视部32判断异常的外力f施加到作业中的机器人12时,监视部32判断在机器人12的作业中发生了异常并将该结果通知给控制部30。
[0026]
例如,假设作业中的机器人12与障碍物接触(碰撞)。此时,传感器20从机器人12检测到超过阈值的异常的外力f。当表示超过预先确定的阈值vth的外力f的信号从传感器20输入到监视部32时,监视部32判断在机器人12的作业中产生了异常并将该主旨通知给控制部30。由此,本实施方式的控制装置14在机器人12与障碍物接触这样的发生异常的情况下可以迅速使机器人12停止。
[0027]
需要说明的是,若运输车16在行驶中,则本实施方式的机器人12不动作。因此,若运输车16在行驶中,则监视部32不需要对是否发生异常进行判断。
[0028]
图3是表示第一实施方式的机器人12的控制方法的一例的流程图。
[0029]
以下,对可由本实施方式的控制装置14执行的“机器人12的控制方法”(以下,简称为控制方法)进行说明。在该控制方法中,首先,对运输车16是否在行驶中进行判定(s1:第一判定步骤)。本步骤可以由判定部28进行。
[0030]
在运输车16不在行驶中的情况下(否),使机器人12能够动作(s2:机器人动作容许步骤)。机器人动作容许步骤包括如下两个步骤。即,机器人动作容许步骤包括基于控制程序22的机器人12的作业(s3:作业步骤)和对施加到机器人12的外力f是否在阈值vth内的(是否存在异常)的监视(s4:监视步骤)。可通过控制部30执行控制程序22来进行作业步骤。另外,可通过监视部32监视传感器20检测到的外力f来进行监视步骤。
[0031]
另一方面,在运输车16在行驶中的情况下(是),使机器人12停止(s5:机器人停止
步骤)。本步骤可由控制部30进行。在使机器人12停止时,如上所述,优选切断向机器人12的电力供给。
[0032]
需要说明的是,在通过监视步骤检测到异常的情况下也执行机器人停止步骤。由此,即使在机器人12的作业中产生了异常,也能够迅速中断该作业。
[0033]
在开始机器人停止步骤之后,进行是否结束该机器人停止步骤的判定(s6:第二判定步骤)。在本步骤中,根据是否满足规定的条件来判定是否结束机器人停止步骤。在此,可以适当确定规定的条件,规定的条件是指例如,在开始机器人停止步骤之后经过规定的时间、或者操作员指示解除停止。
[0034]
像这样,在本实施方式中,若运输车16不行驶中则容许机器人12作业,若运输车16在行驶中则不容许机器人12作业。另外,在机器人12不作业时,即在运输车16正在行驶时,即使外力f施加到机器人12,运输车16也不停止行驶。
[0035]
因此,根据本实施方式,对于具备机器人12和搭载有机器人12的运输车16的协同作业单元10,能够抑制运输车16在通过台阶时停止。
[0036]
[第二实施方式]以下,对第二实施方式进行说明。需要说明的是,对于与在第一实施方式已说明的要素相同的要素,适当省略其说明。
[0037]
图4是第二实施方式的协同作业单元10’的整体构成图。
[0038]
本实施方式的协同作业单元10’具备与第一实施方式相同的机器人12和运输车16。即、机器人12具有通过马达18进行动作的多个关节部,在马达18设有对外力f进行检测的传感器20。在本实施方式中,也将该传感器20称为第一传感器20。运输车16是在搭载有机器人12的状态下沿着行驶路径行驶的agv。
[0039]
另外,协同作业单元10’还具备第二实施方式的控制装置(机器人12的控制装置)14’和第二传感器34。本实施方式的控制装置14’是用于控制机器人12的装置,并且搭载于运输车16。第二传感器34用于对周边的地形进行检测,例如是视觉传感器。
[0040]
需要说明的是,第二传感器34只要是对周边的地形进行检测的话则不限定于视觉传感器,例如也可以是超声波传感器。只要至少能够对运输车16的行进方向的地形进行检测,第二传感器34的数量及配置并不限定于图4所示的构成。
[0041]
图5是第二实施方式的机器人12的控制装置14’的功能构成图。
[0042]
控制装置14’具备运算部26’和存储部24’。运算部26’及存储部24’可具备与第一实施方式的运算部26及存储部24相同的构成作为硬件。存储部24’除了存储用于实现本实施方式的控制的控制程序22’之外,还适当存储机器人12的控制所需的信息。机器人12的控制所需的信息是指例如稍后描述的地形信息。
[0043]
运算部26’具备控制部30’、台阶检测部36、监视部32’、判定部28’和紧急停止部38。这些部分通过运算部26’与存储部24’协同执行控制程序22’来实现。以下,将按照顺序对此进行说明。
[0044]
控制部30’基于控制程序22’对马达18的驱动进行控制从而使机器人12动作。由此,机器人12以与人协同作业的方式进行动作。
[0045]
另外,虽然将另行稍后描述,但有时会从紧急停止部要求控制部30’停止机器人12的动作。当从紧急停止部38要求控制部30’停止机器人12的动作时,通过停止马达18的驱动
来迅速地使机器人12停止(固定姿势)。
[0046]
台阶检测部36对运输车16的行驶路径上的台阶进行检测。本实施方式的台阶检测部36基于地形信息在行驶的运输车16到达台阶之前对该台阶进行检测。地形信息是指至少表示运输车16的行驶路径上的台阶的位置的信息。
[0047]
通过第二传感器34对协同作业单元10’的周边的地形进行检测,伴随着运输车16的行驶能够依次获取地形信息。该方法通常也称为slam(simultaneous localization and mapping:同时定位与地图构建)。
[0048]
另外,也可以通过在协同作业单元10’工作前预先调查台阶在工厂内的地面上的位置来获取地形信息。在该情况下,能够从协同作业单元10’的构成中省略第二传感器34。
[0049]
在外力f施加到机器人12的情况下,判定部28’对该外力f是否是在运输车16通过台阶的期间内施加的外力进行判定。该判定能够通过将台阶检测部36检测到的台阶的位置和施加外力f时的协同作业单元10’的位置进行对照来进行。协同作业单元10’的位置可以例如通过gps获取。判定部28’也可以根据slam匹配的结果来推定协同作业单元10’的位置。
[0050]
当例如外力f施加到机器人12时的协同作业单元10’的位置与台阶的位置一致时,上述判定部28’判定施加到机器人12的外力f是在运输车16通过台阶期间内施加的外力。或者,当外力f施加到机器人12时的协同作业单元10’的位置在以台阶为中心的规定的范围内时,判定施加到机器人12的外力f是在运输车16通过台阶的期间内施加的外力。
[0051]
在施加到机器人12的外力f不是在运输车16通过台阶的期间内施加的情况下,监视部32'基于该外力f对在作业中的机器人12中产生的异常进行检测。与第一实施方式的监视部32相同地,基于外力f是否在预先确定的阈值vth内来进行通过监视部32’对异常的检测。
[0052]
当检测到异常时,监视部32’将该主旨通知给紧急停止部38。在基于不是在运输车16通过台阶的期间内向机器人12施加的外力f而检测到异常的情况下,紧急停止部38向控制部30’要求停止机器人12。另外,要求运输车16停止行驶。
[0053]
当从紧急停止部38要求控制部30’停止机器人12时,控制部30’与此相应地迅速使机器人12停止(固定姿势)。另外,当从紧急停止部38要求运输车16停止行驶时,运输车16当场迅速停止。
[0054]
需要说明的是,在运输车16通过台阶的期间内向机器人12施加外力f的情况下,本来监视部32’就不会检测到异常。因此,在该情况下,紧急停止部38不会要求控制部30’停止机器人12的动作、以及要求运输车16停止行驶。
[0055]
图6是表示第二实施方式的机器人12的控制方法的一例的流程图。
[0056]
以下,对本实施方式的机器人12的控制方法进行说明。需要说明的是,在以下,除非另有说明,否则将说明运输车16沿着行驶路径行驶的情况。
[0057]
首先,对运输车16的行驶路径上的台阶进行检测(s11:台阶检测步骤)。台阶检测步骤基于地形信息由台阶检测部36进行。
[0058]
接下来,在向机器人12施加了外力f的情况下,对该外力f是否是在运输车16通过台阶的期间内施加的外力进行判定(s12:判定步骤)。该判定由判定部28’进行。
[0059]
可以通过将根据地形信息检测到的台阶的位置和协同作业单元10’的当前位置进行对照来进行判定。若是在协同作业单元10’通过台阶附近时施加的外力f的话,则能够判
定该外力f是在运输车16通过台阶的期间内施加的外力。
[0060]
在施加到机器人12的外力f不是在运输车16通过台阶的期间内施加的外力情况下(判定结果是否),停止机器人12并且要求运输车16停止(s13:紧急停止步骤)。基于紧急停止部38在判定步骤中进行判定的结果,通过紧急停止部38分别要求控制部30’和运输车16来进行紧急停止步骤。
[0061]
在外力f是在运输车16通过台阶的期间内施加的外力情况下(判定结果为是),不要求运输车16停止(结束)。因此,即使在运输车16通过台阶时向机器人12施加外力f,运输车16也继续照原样行驶。
[0062]
像这样,根据本实施方式的机器人12的控制装置14’及控制方法,对于具备机器人12和搭载有机器人12的运输车16的协同作业单元10’,能够抑制运输车16在通过台阶时停止。另外,在本实施方式中,可同时进行运输车16的行驶和机器人12的作业。
[0063]
[第三实施方式]以下,对第三实施方式进行说明。第三实施方式的协同作业单元10”在运输车16到达台阶之后对该台阶进行检测这一点上与第二实施方式不相同。以下,对这样的协同作业单元10”的构成进行说明。需要说明的是,对于与在第一实施方式及第二实施方式中已说明的要素相同的要素,将适当省略其说明。
[0064]
图7是第三实施方式的协同作业单元10”的整体构成图。
[0065]
协同作业单元10”具备:具有马达18的机器人12;设置于马达18的第一传感器20;运输车16;第三传感器40;以及控制装置14”。这些中的机器人12、运输车16、马达18和第一传感器20已经在其他实施方式中进行了说明,因此在此省略其说明。
[0066]
第三传感器40对基于施加到运输车16的外力f’的加速度进行检测。在向运输车16施加外力f’时,第三传感器40将与基于该外力f’的加速度相应的检测信号输出到控制装置14”。
[0067]
图8是第三实施方式的机器人12的控制装置14”的功能构成图。
[0068]
在本实施方式中,控制装置14”对机器人12进行控制。控制装置14”具备运算部26”和存储部24”。运算部26”和存储部24”可具备与运算部26和存储部24同样的构成作为硬件。在存储部24”中存储控制程序22”。运算部26”通过执行该控制程序22”来实现将在以下说明的控制方法。
[0069]
运算部26”具备控制部30”、监视部32”、台阶检测部36’、判定部28”和紧急停止部38’。这些部分通过运算部26”与存储部24”协同执行控制程序22”来实现。
[0070]
上述中的控制部30”基于控制程序22”使机器人12进行作业。另外,在控制部30”使机器人12进行作业时,监视部32”监视由第一传感器20检测到的外力f,从而对施加到作业中的机器人12的异常的外力f进行检测。
[0071]
台阶检测部36’计算基于监视部32”检测到的异常的外力f的加速度。由此,求得基于施加到机器人12的外力f的加速度。另外,台阶检测部36’计算基于外力f的加速度与基于从第三传感器40输入的外力f’的加速度的差值。优选将两者分解成三维方向的各轴向的成分,并针对每个成分计算该差值。
[0072]
并且,若计算出的差值在预先确定的范围内的话,则台阶检测部36’判断在运输车16经过的地方存在台阶(对台阶进行检测)。像这样,本实施方式的台阶检测部36’在运输车
16到达台阶之后对该台阶进行检测。需要说明的是,在针对多个方向的每个成分计算加速度的差值的情况下,台阶检测部36’对所有方向上的差值是否在上述范围内进行判定。
[0073]
台阶检测部36’判定是否检测到台阶,从而在向机器人12施加了外力f的情况下,判定部28”对该外力f是否是在运输车16通过台阶的期间内施加的外力进行判定。即、判定部28”对监视部32”是否检测到施加到机器人12的异常的外力f、且台阶检测部36’是否基于该外力f而检测到台阶进行判定。无论是否检测到异常的外力f,在台阶检测部36’没有基于该外力f而检测到台阶的情况下,判定部28”都呼叫紧急停止部38’。
[0074]
当紧急停止部38’被判定部28”呼叫时,紧急停止部38’要求控制部30”停止机器人12。另外,要求运输车16停止行驶。
[0075]
以上是本实施方式的协同作业单元10”的概要。接着,对可由本实施方式的控制装置14”执行的机器人12的控制方法进行说明。
[0076]
图9是表示第三实施方式的机器人12的控制方法的一例的流程图。需要说明的是,在以下,与第二实施方式时相同地,除非另有说明,否则将说明运输车16沿着行驶路径行驶的情况。
[0077]
在本实施方式的控制方法中,首先,监视部32”监视施加到机器人12的外力f,从而对在作业中的机器人12中发生的异常进行检测(s21:监视步骤)。在超过阈值vth的外力f施加到机器人12时,监视部32”判定发生了异常。另外,在此期间,机器人12可与人协同进行作业。控制部30”基于控制程序22”进行作业中的机器人12的动作的控制。
[0078]
当在监视步骤中检测到异常时(是),台阶检测部36’基于施加到机器人12的外力f对台阶进行检测(s22:台阶检测步骤)。如上所述,台阶检测部36’可根据基于施加到机器人12的外力f的加速度与基于施加到运输车16的外力f’的加速度的差值是否在预先确定的范围内对台阶进行检测。
[0079]
接下来,判定部28”接收台阶检测步骤的结果,并对外力f是否是在运输车16通过台阶的期间内施加的外力进行判定(s23:判定步骤)。在该判定中,在台阶检测部36’基于异常的外力f而检测到台阶时,则判定该外力f是在运输车16通过台阶的期间内施加的外力。
[0080]
在判定监视步骤中所检测到的外力f是在运输车16通过台阶的期间内施加的外力情况下(是),暂时结束图9的控制方法(结束)。在该情况下,运输车16若在行驶中,则继续行驶而不停止。
[0081]
另一方面,在异常的外力f不是在运输车16通过台阶的期间内施加的外力情况下(否),呼叫紧急停止部38’(s24:紧急停止步骤)。在紧急停止步骤中,若机器人12正在作业,则使机器人12停止,并且,若运输车16在行驶中,则使运输车16停止。
[0082]
根据本实施方式的机器人12的控制装置14”及控制方法,即使是在异常的外力f施加到机器人12的情况下,在基于该外力f检测到台阶时,也不会呼叫紧急停止部38’。因此,对于具备机器人12和搭载有机器人12的运输车16的协同作业单元10”,能够抑制运输车16在通过台阶时停止。
[0083]
[变形例]以上,作为本发明的一例已经说明了实施方式,但是当然能够对上述实施方式进行各种变更或改进。从技术方案的记载中可以明显知道,进行这样的变更或改进的方式也可以包含在本发明的技术范围内。
[0084]
[从实施方式中得到的发明]以下记载可以从上述实施方式及变形例中掌握的发明。
[0085]
<第一发明>一种机器人(12)的控制装置(14),其基于施加到搭载于运输车(16)的机器人(12)的外力(f)使所述机器人(12)停止,具备:判定部(28),其对所述运输车(16)是否在行驶中进行判定;以及控制部(30),在所述运输车(16)在行驶中的情况下,所述控制部使所述机器人(12)停止,在所述运输车(16)不在行驶中的情况下,所述控制部使所述机器人(12)能够动作。
[0086]
由此,提供一种能够抑制运输车(16)在通过台阶时停止的机器人(12)的控制装置(14)。
[0087]
也可以在所述运输车(16)在行驶中的情况下,所述控制部(30)切断向所述机器人(12)的电力供给,在所述运输车(16)停止的情况下,所述控制部(30)使向所述机器人(12)的电力供给能够进行。由此,能够更加可靠地使机器人(12)停止。
[0088]
<第二发明>一种协同作业单元(10),其具备:上述第一发明的机器人(12)的控制装置(14);机器人(12),其由所述控制装置(14)控制;以及运输车(16),其搭载有所述控制装置(14)和所述机器人(12)。
[0089]
由此,提供一种能够抑制运输车(16)在通过台阶时停止的协同作业单元(10)。
[0090]
<第三发明>一种机器人(12)的控制方法,所述机器人搭载于运输车(16),该控制方法包括:判定步骤,对所述运输车(16)是否在行驶中进行判定;机器人动作容许步骤,在所述运输车(16)不在行驶中时,使所述机器人(12)能够动作,并且,基于施加到所述机器人(12)的外力(f)对是否存在异常进行检测;以及机器人停止步骤,在所述运输车(16)在行驶中的情况下、或者检测到所述异常的情况下,使所述机器人(12)停止。
[0091]
由此,提供一种能够抑制运输车(16)在通过台阶时停止的机器人(12)的控制方法。
[0092]
在所述机器人停止步骤中,也可以通过切断向所述机器人(12)的电力供给来使所述机器人(12)停止。由此,能够更加可靠地使机器人(12)停止。
[0093]
<第四发明>一种所述机器人(12)的控制装置(14’、14”),其基于施加到搭载于运输车(16)的机器人(12)的外力(f)而要求所述运输车(16)停止,具备:台阶检测部(36、36’),其对所述运输车(16)的行驶路径上的台阶进行检测;判定部(28’、28”),在向所述机器人(12)施加了外力(f)的情况下,所述判定部对所述外力(f)是否是在所述运输车(16)经过所述台阶的期间内施加的外力进行判定;以及紧急停止部(38、38’),在所述外力(f)是在所述运输车(16)经过所述台阶的期间内施加的外力情况下,所述紧急停止部不要求所述运输车(16)停止。
[0094]
由此,提供一种能够抑制运输车(16)在通过台阶时停止的机器人(12)的控制装置(14’、14”)。
[0095]
也可以还具备存储部(24’、24”),其存储表示所述行驶路径上的所述台阶的位置的地形信息,所述台阶检测部(36、36’)基于所述地形信息对所述台阶进行检测。由此,基于
地形信息对台阶进行检测。
[0096]
所述台阶检测部(36’)也可以基于施加到所述机器人(12)的所述外力(f)和施加到所述运输车(16)的外力(f’)的差值是否在预先确定的范围内来对所述台阶进行检测。由此,在向机器人(12)施加了外力(f)时,基于该外力(f)对台阶进行检测。
[0097]
<第五发明>一种机器人(12)的控制方法,所述机器人搭载于运输车(16),该控制方法包括:台阶检测步骤,对所述运输车(16)的行驶路径上的台阶进行检测;判定步骤,在向所述机器人(12)施加了外力(f)的情况下,对所述外力(f)是否是所述运输车(16)在经过所述台阶的期间内施加的外力进行判定;以及紧急停止步骤,在所述外力(f)不是在所述运输车(16)经过所述台阶的期间内施加的外力情况下,要求所述运输车(16)紧急停止,在所述外力(f)是在所述运输车(16)经过所述台阶的期间内施加的外力情况下,不要求所述运输车(16)紧急停止。
[0098]
由此,提供一种能够抑制运输车(16)在通过台阶时停止的机器人(12)的控制方法。
[0099]
在所述台阶检测步骤中,也可以基于表示所述行驶路径上的所述台阶的位置的地形信息来进行判定。由此,基于地形信息对台阶进行检测。
[0100]
在所述台阶检测步骤中,也可以基于施加到所述机器人(12)的所述外力(f)与施加到所述运输车(16)的外力(f’)的差值是否在预先确定的范围内来对所述台阶进行检测。由此,在向机器人(12)施加了外力(f)时,基于该外力(f)对台阶进行检测。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1