一种老人锻炼运动陪伴的多功能智能机器人的制作方法
1.本发明涉及机器人领域,特别涉及一种老人锻炼运动陪伴的多功能智能机器人。
背景技术:
2.老人锻炼运动陪伴的多功能智能机器人是对锻炼运动时进行陪伴使用的机器人,能够进行专业的运动陪护,看护陪伴,具备提醒、监测血压等功能,来方便老人运动时的使用,不仅适用于养老机构,更适用于子女不在身边的独居老人,广泛使用在各种老人生活场合,随着人们对老人锻炼运动陪伴的多功能智能机器的使用需求增加,但现有的老人锻炼运动陪伴的多功能智能机器已经无法满足使用的需求,因此需要更方便使用的老人锻炼运动陪伴的多功能智能机器;在老人锻炼运动陪伴的多功能智能机器使用时,老人运动时无法进行搀扶,导致了老人锻炼时容易摔倒,同时,在机器人进行安装使用时,不能够对机器人上身部分进行旋转活动,不方便机器人不同方向的使用。
技术实现要素:
3.本发明的主要目的在于提供一种老人锻炼运动陪伴的多功能智能机器人,可以有效解决背景中的问题。
4.为实现上述目的,本发明采取的技术方案为:
5.一种老人锻炼运动陪伴的多功能智能机器人,包括机器人主机箱,所述机器人主机箱的前表面固定安装有交流显示屏,所述机器人主机箱的前表面位于交流显示屏的下方位置活动安装有多个操控按钮,所述机器人主机箱的后表面固定安装有电机固定箱,所述电机固定箱的一侧外表面活动安装有旋转右臂,所述旋转右臂的外侧固定安装有右臂连接杆,所述电机固定箱的另一侧外表面活动安装有旋转左臂,所述旋转左臂的外侧固定安装有左臂连接杆,所述右臂连接杆和左臂连接杆的中间位置固定安装有抓握支撑杆,所述抓握支撑杆的外侧固定安装有防滑把套,所述电机固定箱的后表面固定安装有电源插头,所述电机固定箱的内表面固定安装有电机安装架,所述电机安装架的内侧固定安装有驱动电机,所述驱动电机的上表面转动安装有电机转轴,所述电机转轴的上端外表面设置有转角齿轮,所述转角齿轮的两侧外表面均固定连接有传动连接杆,所述机器人主机箱的上表面固定安装有头部支撑杆,所述头部支撑杆的上端外表面固定安装有机器人头部,所述机器人头部的前表面固定安装有表情安装板,所述表情安装板的前表面固定安装有播放喇叭,所述表情安装板的前表面位于播放喇叭的上方位置固定安装有两个监控摄像头,所述机器人头部的后表面固定安装有接头固定板,所述接头固定板的后表面固定安装有数据插头,所述接头固定板的后表面位于数据插头的一侧位置固定安装有网线插头,所述机器人主机箱的下表面固定安装连接底座有,所述连接底座的下表面固定连接有旋转连接柱,所述旋转连接柱的下端外表面活动连接有固定底座,所述固定底座的内表面固定安装有旋转电机,所述旋转电机的上表面转动安装有旋转连接轴,所述固定底座的下表面固定安装有移动底板,所述移动底板的下表面固定安装有多个转轮支架,所述转轮支架的内侧转动安装
有移动转轮。
6.优选的,所述电机固定箱的后表面位于电源插头的上方位置活动安装有电机密封门,所述电机密封门的后表面固定安装有密封门把手。
7.优选的,所述右臂连接杆和左臂连接杆的长度相同,所述右臂连接杆和左臂连接杆平行排列,所述抓握支撑杆位于连接底座的前方位置。
8.优选的,所述旋转右臂和旋转左臂均插入至电机固定箱的内部位置,两个所述传动连接杆分别与旋转右臂和旋转左臂固定连接。
9.优选的,所述旋转右臂和旋转左臂分别位于机器人主机箱的两侧位置,所述旋转右臂与旋转左臂围绕机器人主机箱对称排列安装。
10.优选的,所述转角齿轮的数量为三个,三个所述转角齿轮之间配合连接,所述电机转轴通过转角齿轮与传动连接杆同步旋转连接。
11.优选的,所述监控摄像头的数量为两个,所述播放喇叭为弧形结构设计。
12.优选的,所述旋转连接轴的上端贯穿固定底座与旋转连接柱固定连接,所述旋转连接柱围绕固定底座的顶部旋转活动。
13.优选的,所述转轮支架和移动转轮呈四方形排列安装,多个所述移动转轮呈平行放置安装。
14.与现有技术相比,本发明具有如下有益效果:该老人看护用一键呼叫报警智能机器人,通过设置的电机固定箱、旋转右臂、右臂连接杆、旋转左臂、左臂连接杆、抓握支撑杆、防滑把套、电机安装架、驱动电机、电机转轴、转角齿轮和传动连接杆,能够在机器人进行使用时,通过驱动电机带动使右臂连接杆和左臂连接杆中间的抓握支撑杆进行升起,然后老人便可抓握抓握支撑杆外侧的防滑把套进行搀扶,来防止老人锻炼时摔倒,通过设置的连接底座、旋转连接柱、固定底座、旋转电机和旋转连接轴,能够在机器人进行安装使用时,通过旋转连接柱带动机器人上身部分围绕固定底座的顶部旋转活动,从而使机器人多角度方位的旋转,方便机器人不同方向的使用。
附图说明
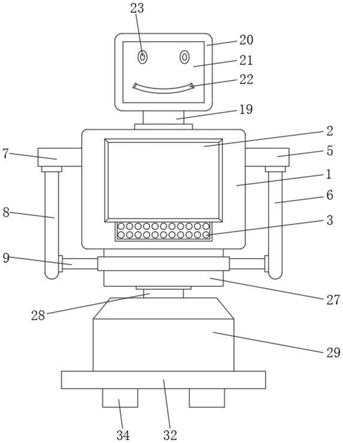
15.图1为本发明一种老人锻炼运动陪伴的多功能智能机器人的整体结构示意图;
16.图2为本发明一种老人锻炼运动陪伴的多功能智能机器人的机器人主机箱的后视图;
17.图3为本发明一种老人锻炼运动陪伴的多功能智能机器人的电机固定箱的剖析图;
18.图4为本发明一种老人锻炼运动陪伴的多功能智能机器人的固定底座的剖析图;
19.图5为本发明一种老人锻炼运动陪伴的多功能智能机器人的移动底板的仰视图。
20.图中:1、机器人主机箱;2、交流显示屏;3、操控按钮;4、电机固定箱;5、旋转右臂;6、右臂连接杆;7、旋转左臂;8、左臂连接杆;9、抓握支撑杆;10、防滑把套;11、电机密封门;12、密封门把手;13、电源插头;14、电机安装架;15、驱动电机;16、电机转轴;17、转角齿轮;18、传动连接杆;19、头部支撑杆;20、机器人头部;21、表情安装板;22、播放喇叭;23、监控摄像头;24、接头固定板;25、数据插头;26、网线插头;27、连接底座;28、旋转连接柱;29、固定底座;30、旋转电机;31、旋转连接轴;32、移动底板;33、转轮支架;34、移动转轮。
具体实施方式
21.为使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本发明。
22.在本发明的描述中,需要说明的是,术语“上”、“下”、“内”、“外”“前端”、“后端”、“两端”、“一端”、“另一端”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性。
23.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“设置有”、“连接”等,应做广义理解,例如“连接”,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
24.如图1-5所示,一种老人锻炼运动陪伴的多功能智能机器人,包括机器人主机箱1,机器人主机箱1的前表面固定安装有交流显示屏2,机器人主机箱1的前表面位于交流显示屏2的下方位置活动安装有多个操控按钮3,机器人主机箱1的后表面固定安装有电机固定箱4,电机固定箱4的一侧外表面活动安装有旋转右臂5,旋转右臂5的外侧固定安装有右臂连接杆6,电机固定箱4的另一侧外表面活动安装有旋转左臂7,旋转左臂7的外侧固定安装有左臂连接杆8,右臂连接杆6和左臂连接杆8的中间位置固定安装有抓握支撑杆9,抓握支撑杆9的外侧固定安装有防滑把套10,电机固定箱4的后表面固定安装有电源插头13,电机固定箱4的内表面固定安装有电机安装架14,电机安装架14的内侧固定安装有驱动电机15,驱动电机15的上表面转动安装有电机转轴16,电机转轴16的上端外表面设置有转角齿轮17,转角齿轮17的两侧外表面均固定连接有传动连接杆18,机器人主机箱1的上表面固定安装有头部支撑杆19,头部支撑杆19的上端外表面固定安装有机器人头部20,机器人头部20的前表面固定安装有表情安装板21,表情安装板21的前表面固定安装有播放喇叭22,表情安装板21的前表面位于播放喇叭22的上方位置固定安装有两个监控摄像头23,机器人头部20的后表面固定安装有接头固定板24,接头固定板24的后表面固定安装有数据插头25,接头固定板24的后表面位于数据插头25的一侧位置固定安装有网线插头26,机器人主机箱1的下表面固定安装连接底座有27,连接底座27的下表面固定连接有旋转连接柱28,旋转连接柱28的下端外表面活动连接有固定底座29,固定底座29的内表面固定安装有旋转电机30,旋转电机30的上表面转动安装有旋转连接轴31,固定底座29的下表面固定安装有移动底板32,移动底板32的下表面固定安装有多个转轮支架33,转轮支架33的内侧转动安装有移动转轮34;
25.在本实施例中,为了对电机固定箱4进行密封固定,电机固定箱4的后表面位于电源插头13的上方位置活动安装有电机密封门11,电机密封门11的后表面固定安装有密封门把手12,电机密封门11用于对电机固定箱4进行密封固定。
26.在本实施例中,为了方便老人进行搀扶,右臂连接杆6和左臂连接杆8的长度相同,右臂连接杆6和左臂连接杆8平行排列,抓握支撑杆9位于连接底座27的前方位置,抓握支撑杆9位于机器人的前方位置方便老人进行搀扶。
27.在本实施例中,为了带动旋转右臂5和旋转左臂7进行旋转,旋转右臂5和旋转左臂7均插入至电机固定箱4的内部位置,两个传动连接杆18分别与旋转右臂5和旋转左臂7固定连接,传动连接杆18用于带动旋转右臂5和旋转左臂7进行旋转。
28.在本实施例中,旋转右臂5和旋转左臂7分别位于机器人主机箱1的两侧位置,旋转右臂5与旋转左臂7围绕机器人主机箱1对称排列安装。
29.在本实施例中,为了使传动连接杆18进行旋转,转角齿轮17的数量为三个,三个转角齿轮17之间配合连接,电机转轴16通过转角齿轮17与传动连接杆18同步旋转连接,电机转轴16通过转角齿轮17使传动连接杆18进行旋转。
30.在本实施例中,为了构成人脸表情,监控摄像头23的数量为两个,播放喇叭22为弧形结构设计,监控摄像头23和播放喇叭22构成了人眼和嘴巴的表情形状。
31.在本实施例中,为了带动机器人上半身进行旋转,旋转连接轴31的上端贯穿固定底座29与旋转连接柱28固定连接,旋转连接柱28围绕固定底座29的顶部旋转活动,旋转连接柱28用于带动机器人上半身进行旋转。
32.在本实施例中,为了对机器人进行支撑和移动,转轮支架33和移动转轮34呈四方形排列安装,多个移动转轮34呈平行放置安装,移动转轮34起到了对机器人进行支撑和移动的作用。
33.需要说明的是,本发明为一种老人锻炼运动陪伴的多功能智能机器人,机器人主机箱1、机器人头部20和固定底座29构成了机器人的主体结构部分,在使用时通过移动底板32下方的移动转轮34对机器人进行支撑和移动,然后机器人主机箱1前方的交流显示屏2能够显示画面,对老人进行锻炼运动陪伴,操控按钮3用于对机器人进行操作控制,机器人头部20的表情安装板21,通过播放喇叭22和监控摄像头23构成了机器人的表情,同时播放喇叭22能够进行声音的播放,监控摄像头23能够进行画面的监控拍摄,接头固定板24上的数据插头25和网线插头26,分别用于数据和网线的传输连接,在机器人对老人锻炼运动陪伴时,电机固定箱4内的驱动电机15能够在通电后运行,带动电机转轴16进行旋转,电机转轴16的旋转通过转角齿轮17与传动连接杆18的同步旋转连接,带动两个传动连接杆18进行旋转,从而使传动连接杆18带动旋转右臂5和旋转左臂7进行旋转,再通过旋转右臂5和旋转左臂7带动右臂连接杆6和左臂连接杆8升起,使右臂连接杆6和左臂连接杆8中间的抓握支撑杆9进行升起,然后老人便可抓握抓握支撑杆9外侧的防滑把套10进行搀扶,来防止老人锻炼时摔倒,在机器人进行移动和站立使用时,固定底座29内的旋转电机30能够运行带动旋转连接轴31进行旋转,然后旋转连接轴31带动固定底座29上方的旋转连接柱28进行旋转,使旋转连接柱28带动机器人上身部分围绕固定底座29的顶部旋转活动,从而使机器人多角度方位的旋转,方便机器人不同方向的使用。
34.以上显示和描述了本发明的基本原理和主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1