一种旋转式装卸货物机械臂的制作方法
1.本实用新型涉及一种旋转式装卸货物机械臂,属于自动上料技术领域。
背景技术:
2.目前,许多工厂的磨床仍然依靠人工上料,不仅劳动强度大、而且生产成本高。随着工业化水平的进一步提高,制造业的生产方式将开始发生根本转变,从传统的劳动力密集型生产制造转型为技术密集型的现代化智能工厂。许多厂家也纷纷开始用工业机器人来代替这些重体力活动,以此来降低工人的劳动强度、提高工厂生产效率。
3.无心外圆磨床的磨削方式易于实现高速、强力和宽砂轮磨削,适合生产中的大批量生产,易于实现自动化生产。无心外圆磨床在磨削加工中能实现较高的加工精度,是加工轴类零件的有效加工方式之一。生产中通常作为最后一道加工工序,多作为加工轴类零件回转面的精加工磨削方法。为了实现无心外圆磨床在生产加工过程中的高效率、安全可靠的加工,配备自动上下料设备无疑很有必要,这样既降低了工人的劳动强度、增加了工厂的生产效率、缩短了零件的加工周期、提高了企业的核心竞争力。
4.为无心外圆磨床设计自动化上下料设备将可以实现机器部分代替人类的工作,尤其是在温度高、湿度大、易爆、污染等恶劣的工作环境下给无心外圆磨床配有自动上下料设备尤为重要,且自动上料机的使用对于企业自动化生产有着十分重要的意义。目前,国内大部分工厂为了提高生产效率都开始采用柔性制造系统fms,而生产设备的自动化也成为柔性制造系统fms的重要一环。把磨床和上料机组合构成一个柔性制造单元,能够适应于不同批量零件的生产,并且有利于节省工件输送费用。因此,设计出自动上料机是非常有意义的。
5.目前,随着工业信息化和自动化的发展进程,上下料机械手得到了飞速发展。由于工业机械手的自动化程度高,方便在机床间传送待加工的工件,因此,工业机械手在机械零件加工方面得到了广泛的应用。工业机械手的广泛应用为其技术创新积累了大量的经验,目前许多企业在工业机械手研发与设计方面有着成熟的技术。如:加工环类零件的沈阳手泵厂,设计出了一种用于加工深井轴承体的自动化加工生产线;加工盘类的上海柴油机厂,设计出了一种工业机械手用于在自动化生产线上加工曲拐和座圈;加工轴类零件的,如大连电机厂的电机轴配有工业机械手的自动化生产线;沈阳第三机床厂用于加工齿轮的y38滚齿机机械手;大连第二机床厂用于仿形的液压循环自动机械手;青海第二机床厂用于加工花键的自动化生产线上使用的工业机械手。目前,国内一些机床厂在机械手的设计与使用更加普遍,一些待出厂的产品在离开工厂前就已经装上了相应的机械手,方便使用者自行安装机械手。工业机械手在注塑机上也得到了广泛的应用,注塑机的开模、加料、合模等需借助于机械手的帮助。机械手在冲床上也有大量使用,装上机械手可实现冲压自动化生产。目前,工业自动化机械手运用于冲床主要在两个方面。一是用于多个工位的冲床,如天津二轻局技术研究所设计的多工位冲床机械手和上海第二汽车配件厂的自动化灯壳冲压加工生产线机械手,这类机
6.械手多用于自动化冲压件工位间的步进操作。二是大型冲床多使用工业机械手来方便机械零件生产过程中的加工操作,如天津拖拉机工厂冲床的下料机械手和沈阳低压开关厂加工磁力起动器的大型冲床的下料机械手。
技术实现要素:
7.本实用新型所要解决的技术问题:针对许多工厂的磨床仍然依靠人工上料,不仅劳动强度大、而且生产成本高的问题,提供了一种旋转式装卸货物机械臂。
8.为解决上述技术问题,本实用新型是通过以下技术方案实现的:
9.一种旋转式装卸货物机械臂,由圆盘底座(1)、大臂回转摆动缸(2)、小臂液压伸缩缸(3)、大臂小臂连接架(4)、大臂液压升降缸(5)、小臂手爪连接板(6)、手爪固定板(7)、手爪主体(8)、左机械爪(9)、右机械爪(10)组成。
10.所述的圆盘底座(1)的直径为60cm、高度为20cm。
11.所述的大臂回转摆动缸(2)的直径为40cm,高度为45cm。
12.所述的小臂液压伸缩缸(3)的长度为60cm,小臂液压伸缩缸(3)的传动速率为8cm/s。
13.所述的大臂小臂连接架(4)的承重为800kg。
14.所述的大臂液压升降缸(5)的高度为80cm,大臂液压升降缸(5)的牵引速率为10cm/s。
15.所述的小臂手爪连接板(6)的厚度为6cm。
16.所述的左机械爪(9)和右机械爪(10)的抓重为20kg,夹紧力为120~140n。
17.所述的圆盘底座(1)、大臂回转摆动缸(2)、小臂液压伸缩缸(3)、大臂小臂连接架(4)、大臂液压升降缸(5)、小臂手爪连接板(6)、手爪固定板(7)、手爪主体(8)、左机械爪(9)、右机械爪(10)的材质均为45号钢。
18.本实用新型与其他技术相比,有益效果在于:
19.本实用新型通过液压传动的方式运作旋转式装卸货物机械臂,液压传动是以具有一定压力能的液体为工作介质,通过液体的压力能来进行能量转换、传递和控制的一种传动方式,液体压力能的转化实现了原动机机械能的传输,再通过液压执行元件对外做功,可以有效实现自动化生产和提高工件的加工质量,通过调节油液的流量、控制油液流动的方向和通断可以实现对液压自行元器件速度和力的控制和调节,液压传动具有较大的抓取力,等体积能够产生更大的功率。液压传动靠液压油的压力能通过能量转换、传递和控制来驱动执行机构动作,由于油液属于液体可以对系统起到一定的润滑作用,延长系统的使用时间。液压系统结构紧凑、控制性能好,易实现自动化作业,本实用新型采用45号钢制备旋转式装卸货物机械臂,45号钢是一种高强度结构钢,具强度大,耐蚀性好、耐磨性和抗拉强度高的优点,可以有效提高旋转式装卸货物机械臂的使用寿命。
附图说明
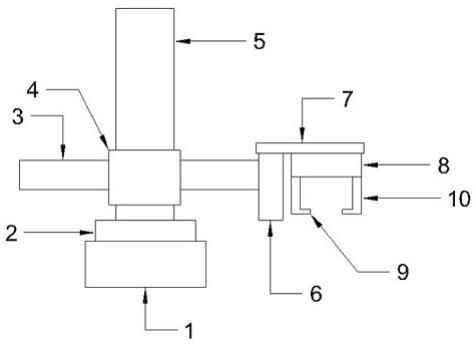
20.图1为本实用新型的正视图。
21.图2为本实用新型的侧视图。
22.图3为本实用新型的俯视图。
23.图中:1、圆盘底座,2、大臂回转摆动缸,3、小臂液压伸缩缸,4、大臂小臂连接架,5、大臂液压升降缸,6、小臂手爪连接板,7、手爪固定板,8、手爪主体,9、左机械爪,10、右机械爪。
具体实施方式
24.下面将结合本实用新型中的附图,对本实用新型实施例中的技术方案进行清楚、完整的描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通的技术人员在没有做出创造性劳动的前提下所获得的所有其它实施例,都属于本实用新型的保护范围。下文中如出现“上”、“下”、“左”、“右”字样,仅表示与附图本身的上、下、左、右方向一致,并不对结构起限定作用。
25.如图1、图2和图3所示,一种旋转式装卸货物机械臂,由圆盘底座1、大臂回转摆动缸2、小臂液压伸缩缸3、大臂小臂连接架4、大臂液压升降缸5、小臂手爪连接板6、手爪固定板7、手爪主体8、左机械爪9、右机械爪10组成。所述的圆盘底座1的直径为60cm、高度为20cm。所述的大臂回转摆动缸2的直径为40cm,高度为45cm。所述的小臂液压伸缩缸3的长度为60cm,小臂液压伸缩缸3的传动速率为8cm/s。所述的大臂小臂连接架4的承重为800kg。
26.所述的大臂液压升降缸5的高度为80cm,大臂液压升降缸5的牵引速率为10cm/s。所述的小臂手爪连接板6的厚度为6cm。所述的左机械爪9和右机械爪10的抓重为20kg,夹紧力为120~140n。所述的圆盘底座1、大臂回转摆动缸2、小臂液压伸缩缸3、大臂小臂连接架4、大臂液压升降缸5、小臂手爪连接板6、手爪固定板7、手爪主体8、左机械爪9、右机械爪10的材质均为45号钢。
27.如图1所示大臂回转摆动缸2位于圆盘底座1的中心,大臂液压升降缸5通过焊接工艺固定在大臂回转摆动缸2上,大臂液压升降缸5与小臂液压伸缩缸3通过大臂小臂连接架4连接,小臂液压伸缩缸3前端连接小臂手爪连接板6,手爪固定板7焊接在小臂手爪连接板6顶部,手爪主体8位于手爪固定板7下方,左机械爪9和右机械爪10分别位于手爪主体8的左右两侧。
28.如图1、图2和图3所示,物料被左机械爪9和右机械爪10抓取,在大臂回转摆动缸2和小臂液压伸缩缸3的运动下以大臂液压升降缸5为圆心作圆轴运动,再通过大臂液压升降缸5的运动作z轴上下运动,从而实现对物料的抓取运输。
29.以上借助具体实施例对本实用新型做了进一步描述,但是应该理解的是,这里具体的描述,不应理解为对本实用新型的实质和范围的限定,本领域内的普通技术人员在阅读本说明书后对上述实施例做出的各种修改,都属于本实用新型所保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1