一种三轴串联式旋转关节机器人的制作方法
1.本实用新型涉及驱动设备领域,具体涉及一种三轴串联式旋转关节机器人。
背景技术:
2.关节机器人,也称关节手臂机器人或关节机械手臂,是当今工业领域中最常见的工业机器人的形态之一,适合用于诸多工业领域的机械自动化作业。
3.当前,在增材制造、焊接、喷涂、搬运等应用领域,六自由度的机器人作为执行运动机构,获得广泛应用。然而,在这些机器人应用中,经常遇到对运动路径复杂程度要求低的情况,比如仅仅需要xyz三个方向的运动,采用常规的6轴机器人会造成功能浪费,且提高成本,而采用3轴直线运动机器人或桁架型机器人的结构容易存在设备结构复杂、灵活性差的问题,不利于操作的正常进行。
技术实现要素:
4.本实用新型的目的在于提供一种降低成本且增大操作范围的三轴串联式旋转关节机器人。
5.本实用新型解决上述问题所采用的技术方案是:
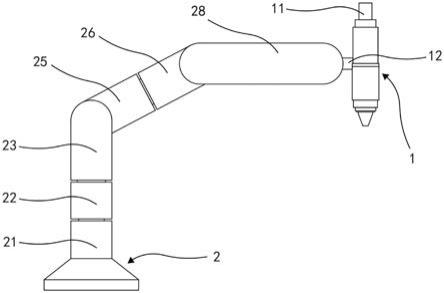
6.一种三轴串联式旋转关节机器人,包括激光修复头以及用于驱动激光修复头多轴移动的驱动装置,所述激光修复头包括开设有激光传输通道、粉末输入通道的主体件和延伸臂,延伸臂的一端与主体件的外侧壁一体式连接,所述驱动装置包括底座、第一连接管、第一直角管、第二连接管、第一延伸管、第二直角管、第三连接管以及第二延伸管,所述底座的底端设有用于驱动装置固定于待修复工件上的固定装置,底座的顶端与第一连接管的底端转动连接,底座内设有用于驱动第一连接管水平方向转动的第一驱动模块,所述第一连接管的顶端与第一直角管的底端固定连接,第一直角管的顶端与第二连接管的一端转动连接,第一直角管内设有用于驱动第二连接管竖直方向转动的第二驱动模块,所述第二连接管的另一端与第一延伸管的底端固定连接,第一延伸管的顶端与第二直角管的底端固定连接,第二直角管的顶端与第三连接管的一端转动连接,第二直角管内设有用于驱动第三连接管竖直方向转动的第三驱动模块,所述第三连接管的另一端与第二延伸管的底端固定连接,第二延伸管的顶端与延伸臂的另一端转动连接,第二延伸管内设有用于调整激光修复头照射方向的调整模块,通过第一驱动装置控制第一连接管转动、第二驱动装置控制第二连接管的转动以及第三驱动装置对第三连接管的转动,从而达到控制激光修复头活动范围的目的。
7.作为上述技术方案的进一步改进,所述第一驱动模块包括第一电机和第一齿轮,第一电机固定连接于底座上,第一电机的输出轴与第一齿轮固定连接,第一连接管内设有内齿圈,第一齿轮与第一连接管啮合。第一电机转动并带动第一齿轮,从而使得第一连接管转动,实现了激光修复头水平方向360
°
转动,从而达到激光修复头水平方向上以底座为圆心进行圆形范围内修复的目的。
8.作为上述技术方案的进一步改进,所述第二驱动模块包括第二电机、第一锥齿轮组、第一螺纹杆、第一滑块、第一槽柱以及第二齿轮,第二电机固定连接于第一直角管上,第一锥齿轮组包括第一锥齿轮和第二锥齿轮,第一锥齿轮固定连接于第二电机的输出轴上,第一锥齿轮和第二锥齿轮啮合,第二锥齿轮固定连接于第一螺纹杆上,第一螺纹杆与第一直角管转动连接,所述第一滑块包括第一主体、第一延伸块以及第一滑动销,第一主体的顶端与第一直角管滑动连接,第一主体底端的右端与第一延伸块的顶端一体式连接,第一延伸块的底端开设有螺纹孔,第一延伸块与第一螺纹杆螺纹配合,第一主体底端的左端与第一滑动销的顶端一体式连接,所述第一槽柱与第一直角管转动连接,第一槽柱上开设有第一循环槽,第一滑动销的底端位于第一循环槽内以使得第一滑块滑动时第一滑块驱动第一槽柱转动,所述第二齿轮固定连接与第一槽柱上,第二连接管内设有内齿圈,第二齿轮与第二连接管啮合。第二电机转动并通过第一锥齿轮组带动第一螺纹杆转动,使得第一滑块滑动且带动第一滑动销在第一循环槽内移动,从而使得第一槽柱转动,第一槽柱通过第二齿轮带动第二连接管转动,实现了激光修复头竖直方向360
°
的转动,从而达到激光修复头竖直方向上以第二连接管为圆心进行圆形范围内修复的目的。
9.作为上述技术方案的进一步改进,所述第三驱动模块包括第三电机、第二锥齿轮组、第二螺纹杆、第二滑块、第二槽柱以及第三齿轮,第三电机固定连接于第二直角管上,第二锥齿轮组包括第三锥齿轮和第四锥齿轮,第三锥齿轮固定连接于第三电机的输出轴上,第三锥齿轮和第四锥齿轮啮合,第四锥齿轮固定连接于第二螺纹杆上,第二螺纹杆与第二直角管转动连接,所述第二滑块包括第二主体、第二延伸块以及第二滑动销,第二主体的顶端与第二直角管滑动连接,第二主体底端的左端与第二延伸块的顶端一体式连接,第二延伸块的底端开设有螺纹孔,第二延伸块与第二螺纹杆螺纹配合,第二主体底端的右端与第二滑动销的顶端一体式连接,所述第二槽柱与第二直角管转动连接,第二槽柱上开设有第二循环槽,第二滑动销的底端位于第二循环槽内以使得第二滑块滑动时第二滑块驱动第二槽柱转动,所述第三齿轮固定连接于第二槽柱上,第三连接管内设有内齿圈,第三齿轮与第三连接管啮合。第三电机转动并通过第二锥齿轮组带动第二螺纹杆转动,使得第二滑块滑动且带动第二滑动销在第二循环槽内移动,从而使得第二槽柱转动,第二槽柱通过第三齿轮带动第三连接管转动,实现了激光修复头竖直方向360
°
的转动,从而达到激光修复头竖直方向上以第三连接管为圆心进行圆形范围内修复的目的。
10.作为上述技术方案的进一步改进,所述调整模块包括滑动杆、u形连杆、转动柱、第三锥齿轮组、转动杆以及旋钮件,滑动杆的一端与第二延伸管滑动连接,滑动杆的另一端与u 形连杆的底端的中央铰接,所述延伸臂的另一端的两侧均一体式连接有圆盘,u形连杆顶端的左右两端分别铰接于圆盘侧面的边缘位置上,所述转动柱与第二延伸管转动连接,转动柱上开设有螺纹孔,滑动杆上设有螺纹,转动柱与滑动杆螺纹配合,所述第三锥齿轮组包括第五锥齿轮和第六锥齿轮,第五锥齿轮固定连接于转动柱上,第五锥齿轮与第六锥齿轮啮合,第六锥齿轮与转动杆的一端固定连接,转动杆的另一端穿过第二延伸管以使得转动杆的另一端外露于第二延伸管外,转动杆的另一端设有v型弹簧片,v型弹簧片的两端均固定连接有卡块,卡块外露于转动杆另一端的侧壁外,所述旋钮件插接于第二延伸管上,旋钮件与第二延伸管转动连接,旋钮件上开设有转动槽,转动槽的一端的侧壁上开设有六个用于容纳卡块的凹槽以使得卡块进入凹槽内时旋钮件与转动杆卡接固定,凹槽绕旋钮件的中
心轴等角度分布,通过设置多组凹槽提高卡块进入凹槽的概率,避免卡块无法进入凹槽从而无法进行激光修复头的激光照射角度的调节,转动槽的另一端开设有用于容纳卡块的环形槽以使得卡块进入环形槽内时旋钮件与转动杆转动连接。使用时,向外拉动旋钮件使得卡块进入凹槽内,转动旋钮件带动转动杆转动,通过第三锥齿轮组使得转动柱转动,从而滑动杆直线运动,滑动杆通过u形连杆带动圆盘转动,从而达到控制激光修复头激光照射角度的目的;使用结束后,向内推动旋钮件使得卡块进入环形内,旋钮件与转动杆解除固定,实现对激光修复头的激光照射角度的调整,满足在特殊位置进行修复时激光修复头无法自动校准激光照射角度的需求,提高设备的适用性。
11.作为上述技术方案的进一步改进,所述第一连接管、第一直角管、第二连接管、第一延伸管、第二直角管、第三连接管以及第二延伸管均为两端开口的中空结构,减低设备重量且方便内部走线,避免出现驱动装置运作时外部线路缠绕设备的情况。
12.作为上述技术方案的进一步改进,所述固定装置为电磁铁,便于驱动装置固定于待修复部件表面以及从待修复部件表面取下,方便驱动装置在待修复部件表面的位置调整,提高工作效率。
13.本实用新型与现有技术相比,具有以下优点和效果:
14.本实用新型通过采用三个运动关节的结构使得驱动装置能够以底座为圆心控制激光修复头进行半球体范围内的修复工作,相较于六轴机器人结构减少了三个运动关节,减少了驱动装置的制造成本和后期维护成本,利于市场推广。同时,通过驱动装置上多个管部件的中空结构设置,降低驱动装置的重量和制造成本,且利于于驱动装置在待修复部件表面的位置调整操作,缩短修复总时长,实现现场快速修复,提高工作效率,降低修复成本。进一步的,通过采用三轴串联式旋转关节结构,使得关节能够转向同一方向,相较于三轴直线运动机器人增大了驱动装置控制激光修复头进行修复的直线距离,进而扩大了激光修复头的运动范围,减少了移动设备进行修复的操作频率,提高工作效率。
附图说明
15.图1是本实用新型一种采用三轴关节机器人的便携修复设备的驱动装置的结构示意图。
16.图2是本实用新型一种采用三轴关节机器人的便携修复设备的外接箱柜的结构示意图。
17.图3是图1中所示驱动装置内部的结构示意图。
18.图4是图3中所示第一直角管内部的结构示意图。
19.图5是图3中所示第二直角管内部的结构示意图。
20.图6是图3中所示第二延伸管内部的结构示意图。
21.图7是图6中所示卡块的结构示意图。
22.其中,1
‑
激光修复头,11
‑
主体件,12
‑
延伸臂,121
‑
圆盘,2
‑
驱动装置,21
‑
底座,211
‑ꢀ
固定装置,212第一驱动模块,2121
‑
第一电机,2122
‑
第一齿轮,22
‑
第一连接管,23
‑
第一直角管,231
‑
第二驱动模块,2311
‑
第二电机,2312
‑
第一锥齿轮组,23121
‑
第一锥齿轮, 23122
‑
第二锥齿轮,2313
‑
第一螺纹杆,2314
‑
第一滑块,23141
‑
第一主体,23142
‑
第一延伸块,23143
‑
第一滑动销,2315
‑
第一槽柱,23151
‑
第一循环槽,2316第二齿轮,24
‑
第二连接
管,25
‑
第一延伸管,26
‑
第二直角管,261
‑
第三驱动模块,2611
‑
第三电机,2612
‑
第二锥齿轮组,26121
‑
第三锥齿轮,26122
‑
第四锥齿轮,2613
‑
第二螺纹杆,2614
‑
第二滑块, 26141
‑
第二主体,26142
‑
第二延伸块,26143
‑
第二滑动销,2615
‑
第二槽柱,26151
‑
第二循环槽,2616
‑
第三齿轮,27
‑
第三连接管,28
‑
第二延伸管,281
‑
调整模块,2811
‑
滑动杆, 2812
‑
u形连杆,2813
‑
转动柱,2814
‑
第三锥齿轮组,28141
‑
第五锥齿轮,28142
‑
第六锥齿轮,2815
‑
转动杆,28151
‑
v型弹簧片,28152
‑
卡块,2816
‑
旋钮件,28161
‑
转动槽,28162
‑ꢀ
凹槽,28163
‑
环形槽,3
‑
外接箱柜,31
‑
控制器,32
‑
激光器,33
‑
冷水机,34
‑
送粉模块, 35
‑
滚轮,36
‑
储物仓,4
‑
内齿圈。
具体实施方式
23.下面结合附图并通过实施例对本实用新型作进一步的详细说明,以下实施例是对本实用新型的解释而本实用新型并不局限于以下实施例。
24.参见图1
‑
图7,本实施例一种采用三轴关节机器人的便携修复设备,包括激光修复头1、用于驱动激光修复头1多轴移动的驱动装置2以及外接箱柜3,所述激光修复头1包括开设有激光传输通道、粉末输入通道的主体件11和延伸臂12,延伸臂12的一端与主体件11的外侧壁一体式连接,所述驱动装置2包括底座21、第一连接管22、第一直角管23、第二连接管24、第一延伸管25、第二直角管26、第三连接管27以及第二延伸管28,所述底座21 的底端设有用于驱动装置2固定于待修复工件上的固定装置211,底座21的顶端与第一连接管22的底端转动连接,底座21内设有用于驱动第一连接管22水平方向转动的第一驱动模块212,所述第一连接管22的顶端与第一直角管23的底端固定连接,第一直角管23的顶端与第二连接管24的一端转动连接,第一直角管23内设有用于驱动第二连接管24竖直方向转动的第二驱动模块231,所述第二连接管24的另一端与第一延伸管25的底端固定连接,第一延伸管25的顶端与第二直角管26的底端固定连接,第二直角管26的顶端与第三连接管27的一端转动连接,第二直角管26内设有用于驱动第三连接管27竖直方向转动的第三驱动模块261,所述第三连接管27的另一端与第二延伸管28的底端固定连接,第二延伸管28的顶端与延伸臂12的另一端转动连接,第二延伸管28内设有用于调整激光修复头 1照射方向的调整模块281,所述外接箱柜3包括用于控制驱动装置2的控制器31、激光器 32、冷水机33以及送粉模块34,所述控制器31与驱动装置2连接,激光器32的激光发射口与激光传输通道的进口之间通过光纤连接,冷水机33与激光器32连接,送粉模块34的出粉口与粉末输入通道的进口之间通过柔性管连通,所述第一驱动模块212包括第一电机 2121和第一齿轮2122,第一电机2121固定连接于底座21上,第一电机2121的输出轴与第一齿轮2122固定连接,第一连接管22内设有内齿圈4,第一齿轮2122与第一连接管22 啮合,所述第二驱动模块231包括第二电机2311、第一锥齿轮组2312、第一螺纹杆2313、第一滑块2314、第一槽柱2315以及第二齿轮2316,第二电机2311固定连接于第一直角管23上,第一锥齿轮组2312包括第一锥齿轮23121和第二锥齿轮23122,第一锥齿轮23121 固定连接于第二电机2311的输出轴上,第一锥齿轮23121和第二锥齿轮23122啮合,第二锥齿轮23122固定连接于第一螺纹杆2313上,第一螺纹杆2313与第一直角管23转动连接,所述第一滑块2314包括第一主体23141、第一延伸块23142以及第一滑动销23143,第一主体23141的顶端与第一直角管23滑动连接,第一主体23141底端的右端与第一延伸块 23142的顶端一体式连接,第一延伸块23142的底端开设有
螺纹孔,第一延伸块23142与第一螺纹杆2313螺纹配合,第一主体23141底端的左端与第一滑动销23143的顶端一体式连接,所述第一槽柱2315与第一直角管23转动连接,第一槽柱2315上开设有第一循环槽 23151,第一滑动销23143的底端位于第一循环槽23151内以使得第一滑块2314滑动时第一滑块2314驱动第一槽柱2315转动,所述第二齿轮2316固定连接与第一槽柱2315上,第二连接管24内设有内齿圈4,第二齿轮2316与第二连接管24啮合,所述第三驱动模块 261包括第三电机2611、第二锥齿轮组2612、第二螺纹杆2613、第二滑块2614、第二槽柱 2615以及第三齿轮2616,第三电机2611固定连接于第二直角管26上,第二锥齿轮组2612 包括第三锥齿轮26121和第四锥齿轮26122,第三锥齿轮26121固定连接于第三电机2611 的输出轴上,第三锥齿轮26121和第四锥齿轮26122啮合,第四锥齿轮26122固定连接于第二螺纹杆2613上,第二螺纹杆2613与第二直角管26转动连接,所述第二滑块2614包括第二主体26141、第二延伸块26142以及第二滑动销26143,第二主体26141的顶端与第二直角管26滑动连接,第二主体26141底端的左端与第二延伸块26142的顶端一体式连接,第二延伸块26142的底端开设有螺纹孔,第二延伸块26142与第二螺纹杆2613螺纹配合,第二主体26141底端的右端与第二滑动销26143的顶端一体式连接,所述第二槽柱2615与第二直角管26转动连接,第二槽柱2615上开设有第二循环槽26151,第二滑动销26143的底端位于第二循环槽26151内以使得第二滑块2614滑动时第二滑块2614驱动第二槽柱2615 转动,所述第三齿轮2616固定连接于第二槽柱2615上,第三连接管27内设有内齿圈4,第三齿轮2616与第三连接管27啮合,所述调整模块281包括滑动杆2811、u形连杆2812、转动柱2813、第三锥齿轮组2814、转动杆2815以及旋钮件2816,滑动杆2811的一端与第二延伸管28滑动连接,滑动杆2811的另一端与u形连杆2812的底端的中央铰接,所述延伸臂12的另一端的两侧均一体式连接有圆盘121,u形连杆2812顶端的左右两端分别铰接于圆盘121侧面的边缘位置上,所述转动柱2813与第二延伸管28转动连接,转动柱2813 上开设有螺纹孔,滑动杆2811上设有螺纹,转动柱2813与滑动杆2811螺纹配合,所述第三锥齿轮组2814包括第五锥齿轮28141和第六锥齿轮28142,第五锥齿轮28141固定连接于转动柱2813上,第五锥齿轮28141与第六锥齿轮28142啮合,第六锥齿轮28142与转动杆2815的一端固定连接,转动杆2815的另一端穿过第二延伸管28以使得转动杆2815的另一端外露于第二延伸管28外,转动杆2815的另一端设有v型弹簧片28151,v型弹簧片 28151的两端均固定连接有卡块28152,卡块28152外露于转动杆2815另一端的侧壁外,所述旋钮件2816插接于第二延伸管28上,旋钮件2816与第二延伸管28转动连接,旋钮件2816上开设有转动槽28161,转动槽28161的一端的侧壁上开设有六个用于容纳卡块 28152的凹槽28162以使得卡块28152进入凹槽28162内时旋钮件2816与转动杆2815卡接固定,凹槽28162绕旋钮件2816的中心轴等角度分布,转动槽28161的另一端开设有用于容纳卡块28152的环形槽28163以使得卡块28152进入环形槽28163内时旋钮件2816与转动杆2815转动连接,所述第一连接管22、第一直角管23、第二连接管24、第一延伸管25、第二直角管26、第三连接管27以及第二延伸管28均为两端开口的中空结构,所述外接箱柜3的底端安装有滚轮35,外接箱柜3上设有用于容纳驱动装置2的储物仓36,所述固定装置211为电磁铁。
25.综上所述,本实用新型使用方法如下:
26.步骤一:将驱动装置通过固定装置固定于待修复工件表面;
27.步骤二:第一驱动模块运作,调整激光修复头水平方向上的朝向;
28.步骤三:第二驱动模块和第三驱动模块运作,激光修复头与待修复位置之间的距离,将待修复位置置于激光修复头下;
29.步骤四:向外拉出旋钮件并转动,调整激光修复头的激光照射角度,使其对准待修复位置;
30.步骤五:调整结束后,向内推入旋钮件;
31.步骤六:激光器工作,激光出口件射出激光;
32.步骤七:送粉模块将粉末送入激光修复件内,粉末经激光照射加热后变为熔融状态,并滴在待修复位置。
33.本说明书中所描述的以上内容仅仅是对本实用新型所作的举例说明。本实用新型所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,只要不偏离本实用新型说明书的内容或者超越本权利要求书所定义的范围,均应属于本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1