特种作业机器人越沟宽和爬台阶性能的测试系统的制作方法
1.本实用新型涉及特种作业机器人测试技术领域,特别是特种作业机器人越沟宽和爬台阶性能的测试系统。
背景技术:
2.特种作业机器人也称特种机器人,一般专指专业服务机器人,是近年来得到快速发展和广泛应用的一类机器人,在我国国民经济各行业均有应用。其应用范围主要包括:农业、电力、建筑、物流、医疗、护理、康复、安防与救援、军用、核工业、矿业、石油化工、市政工程等。
3.由于特种作业机器人需要面对各种复杂的作业环境,因此,对于特种作业机器人的性能要求较高,而且不同环境对应的性能要求也各不相同,因此特种作业机器人一般需要进行性能测试。
4.现需要设计一款测试设备,需要对特种作业机器人的越沟宽性能、爬台阶性能进行测试。
技术实现要素:
5.本实用新型要解决的技术问题,在于提供一种特种作业机器人越沟宽和爬台阶性能的测试系统,能够对特种作业机器人的越沟宽性能、爬台阶的性能进行测试。
6.本实用新型是这样实现的:一种特种作业机器人越沟宽和爬台阶性能的测试系统,包括
7.越沟宽测试装置,包括宽度调节装置;所述宽度调节装置包括驱动装置和水平移动平台;所述驱动装置的输出端连接于所述水平移动平台;
8.爬台阶测试装置,包括同步升降台阶和同步升降支撑平台;所述同步升降支撑平台包括第二升降机构和第二升降平台,所述第二升降机构的输出端连接于所述第二升降平台,所述第二升降平台间隔设置在所述水平移动平台的后方;所述同步升降台阶包括若干个台阶和第三升降机构;所述第三升降机构驱动若干个所述台阶进行同步升降;若干个所述台阶设置在所述第二升降平台的后方;
9.控制器,与所述驱动装置、第二升降机构及第三升降机构分别通信连接。
10.进一步地,所述宽度调节装置还包括
11.第三支撑架;所述水平移动平台固定连接于所述第三支撑架的顶部;
12.轻轨,所述轻轨有两条,两所述轻轨沿前后方向平行铺设;
13.轨道轮,所述轨道轮至少有四个,且为偶数个;所述轨道轮呈对称布置且旋转地连接于所述第三支撑架;每所述轨道轮还滚动连接于所述轻轨。
14.进一步地,所述驱动装置包括第三执行元件,所述第三执行元件的输出端连接于所述第三支撑架。
15.进一步地,所述驱动装置还包括第三传动模块,所述第三执行元件的输出端连接
于所述第三传动模块;所述第三传动模块连接于所述第三支撑架。
16.进一步地,所述第三执行元件为电机;
17.所述驱动装置还包括第三编码器;所述第三编码器还通信连接于所述控制器;
18.所述第三传动模块包括第三减速机、第二主动链轮、第二从动链轮、第二转轴、转轴固定座、第四链轮、第五链轮、第二链条连接张紧杆、第二链条、第二主动力链条及链轮固定座;
19.所述第四链轮和第五链轮的大小和齿数分别相等;
20.所述第四链轮有两个;
21.所述第五链轮有两个;
22.所述第二链条连接张紧杆有4个;
23.所述第二链条有两个;
24.所述链轮固定座有两个;每所述链轮固定座上设有旋转轴;
25.所述第三执行元件的输出轴固定连接于所述第三减速机的输入端;
26.所述第三减速机的输出轴固定套设有所述第二主动链轮;
27.所述第二转轴上固定套设有所述第二从动链轮和第四链轮;所述第二转轴的两端分别旋转地连接有一所述转轴固定座;所述第三编码器连接于所述第二转轴;
28.所述第五链轮一一对应固定套在所述旋转轴上;且所述第四链轮和第五链轮等高布置,两所述第四链轮和两所述第五链轮呈矩形布置;
29.每所述第二链条分别套在一所述第四链轮和一所述第五链轮上;
30.每所述第二链条固定连接有两所述第二链条连接张紧杆,且4个所述第二链条连接张紧杆还分别固定连接于所述第三支撑架。
31.进一步地,所述第二升降机构包括
32.第四支撑架;
33.第四执行元件,所述第四执行元件的输出端连接于所述第二升降平台;所述第四执行元件通信连接于所述控制器;
34.第二滑动组,所述第二滑动组滑动连接于所述第四支撑架;所述第二升降平台固定连接于所述第二滑动组。
35.进一步地,所述第二升降机构还包括第四传动模块;所述第四执行元件的输出端连接于所述第四传动模块;所述第四传动模块还连接于所述第二升降平台。
36.进一步地,所述第二升降机构还包括第四编码器,所述第四编码器通信连接于所述控制器;
37.所述第四执行元件为电机;
38.所述第四传动模块包括第四减速机、第三转轴、第三主动链轮、第三从动链轮、第六链轮、第七链轮、第八链轮、第二链轮轴、第三链条连接张紧杆、第三主动力链条及第三链条;
39.所述第六链轮、第七链轮、第八链轮分别有4个;所述第六链轮、第七链轮、第八链轮的大小和齿数都相等;
40.所述第三链条有6根;
41.所述第二链轮轴有6根;
42.所述第三链条连接张紧杆有8个;
43.所述第四执行元件的输出轴固定连接于所述第四减速机的输入端;所述第三主动链轮固定套在所述第四减速机的输出轴上;
44.所述第三转轴旋转地连接于所述第四支撑架上;所述第四编码器连接于所述第三转轴;
45.所述第三从动链轮、两所述第六链轮和两所述第七链轮都固定套在第三转轴上;
46.所述第三主动链轮和第三从动链轮分别与所述第三主动力链条啮合;
47.6根所述第二链轮轴旋转地连接于所述第四支撑架,且每所述第二链轮轴和所述第三转轴平行;
48.其中两根所述第二链轮轴和所述第三转轴等高布置,并位于所述第二升降平台下方,且每根所述第二链轮轴固定套设有一所述第七链轮和一所述第八链轮;
49.另外四根所述第二链轮轴呈矩形等高布置在所述第四支撑架的顶部,并位于所述第二升降平台的上方;
50.所述第四支撑架的顶部的其中两根所述第二链轮轴,和所述第三转轴位于同一竖直平面内,且每所述第二链轮轴固定套设有一所述第六链轮;
51.所述第四支撑架的顶部的另外两根第二链轮轴,和第二升降平台下方的两所述第二链轮轴位于同一竖直平面内,且每所述第二链轮轴固定套设有一所述第八链轮;
52.其中,所述第二升降平台上方和下方的所述第六链轮一一对应套上一所述第三链条,且每所述第三链条固定连接有两所述第三链条连接张紧杆;
53.所述第三转轴上的所述第七链轮和等高布置的第二链轮轴上的所述第七链轮一一对应套上一所述第三链条;
54.所述第二升降平台上方和下方的所述第八链轮一一对应套上一所述第三链条,且每所述第三链条固定连接有两所述第三链条连接张紧杆;
55.8个所述第三链条连接张紧杆还分别固定连接于所述第二升降平台。
56.进一步地,所述第三升降机构包括
57.驱动电机;所述驱动电机通信连接于所述控制器;
58.第五减速机;所述驱动电机的输出轴连接于所述第五减速机的输入端;
59.第四主动链轮,所述第四主动链轮固定套在所述第五减速机的输出轴上;
60.第四转轴;
61.第四从动链轮,所述第四从动链轮固定套在所述第四转轴上;
62.第四主动力链条,所述第四主动力链条和所述第四主动链轮与第四从动链轮啮合;
63.第二螺旋升降机,每所述第二螺旋升降机包括输入端、输出丝杆和输出螺母;所述输出丝杆和输出螺母连接在一起;所述第二螺旋升降机的数量等于所述台阶的数量的两倍;每所述台阶的两端一一对应固定连接于两所述输出螺母,且所述输出丝杆穿过所述台阶,所述输出丝杆呈竖直布置;其中一所述台阶对应的两所述第二螺旋升降机的输入端一一对应固定连接于所述第四转轴的两端;同一侧的相邻的两所述第二螺旋升降机的输入端通过链轮
ꢀ‑
链条传动机构连接在一起,且各个链轮
‑
链条传动机构的链轮齿数相同或不同。
64.进一步地,还包括
65.台阶框架,所述台阶框架具有一台阶容纳空腔;每所述第二螺旋升降机固定连接于所述台阶框架;各个所述台阶位于所述台阶容空腔内;
66.导向轴,所述导向轴固定连接于所述台阶框架;
67.直线轴承,直线轴承的数量等于所述导向轴的数量;所述导向轴一一对应嵌入直线轴承的内圈;每所述台阶的两端分别固定连接有直线轴承,且所述导向轴穿过所述台阶,所述导向轴呈竖直布置。
68.进一步地,所述台阶有5个,5个所述台阶从低到高依次命名为:第一台阶、第二台阶、第三台阶、第四台阶和第五台阶;
69.所述第二螺旋升降机有10个;
70.所述链轮
‑
链条传动机构包括两个第一链轮
‑
链条传动机构、两个第二链轮
‑
链条传动机构、两个第三链轮
‑
链条传动机构和两个第四链轮
‑
链条传动机构;
71.每所述第一链轮
‑
链条传动机构包括第九链轮、第十链轮和第四链条;所述第九链轮的齿数为12;所述第十链轮的齿数为15;
72.每所述第二链轮
‑
链条传动机构包括第十一链轮、第十二链轮和第五链条;所述第十一链轮的齿数为15;所述第十二链轮的齿数为20;
73.每所述第三链轮
‑
链条传动机构包括第十三链轮、第十四链轮和第六链条;所述第十三链轮的齿数为10;所述第十四链轮的齿数为15;
74.每所述第四链轮
‑
链条传动机构包括第十五链轮、第十六链轮和第七链条;所述第十五链轮的齿数为15;所述第十六链轮的齿数为15;
75.其中,每所述台阶的两边分别用一个所述第二螺旋升降机进行升降;
76.升降所述第一台阶的两所述第二螺旋升降机的输入端分别固定连接有一所述第十六链轮;
77.升降所述第二台阶的两所述第二螺旋升降机的输入端分别固定连接有一所述第十四链轮和一所述第十五链轮;其中位于同一边的所述第十六链轮和第十五链轮分别和一所述第七链条啮合;
78.升降所述第三台阶的两所述第二螺旋升降机的输入端一一对应固定连接于所述第五减速机的输出轴;且这两个所述第二螺旋升降机的输入端分别固定连接于有一所述第十二链轮和一所述第十三链轮;其中位于同一边的所述第十四链轮和第十三链轮分别和一所述第六链条啮合;
79.升降所述第四台阶的两所述第二螺旋升降机的输入端分别固定连接有一所述第十链轮和一所述第十一链轮;其中位于同一边的所述第十二链轮和第十一链轮分别和一所述第五链条啮合;
80.升降所述第五台阶的两所述第二螺旋升降机的输入端分别固定连接有一所述第九链轮;其中位于同一边的所述第九链轮和第十链轮分别和一所述第四链条啮合。
81.进一步地,还包括
82.第五编码器;所述第五编码器还通信连接于所述控制器;
83.编码器支座,所述第五编码器固定在所述编码器支座上;
84.第二同步带轮,有两个,其中一个所述第二同步带轮固定套在所述第四转轴上;另一个所述第二同步带轮固定套在所述第五编码器上;
85.第二同步带;所述第二同步带套在两所述第二同步带轮上。
86.进一步地,还包括垫高平台;所述垫高平台包括相互连接的水平部和斜坡部;所述水平部设置在所述同步升降台阶的入口前。
87.本实用新型具有如下优点:本实用新型提供一种特种作业机器人越沟宽和爬台阶性能的测试系统,包括越沟宽测试装置、爬台阶测试装置及控制器。通过控制器控制驱动装置,来驱动水平移动平台进行移动,从而调节水平移动平台和所述同步升降支撑平台的间距,从而适应不同沟宽的测试要求;通过控制器控制同步升降支撑平台和同步升降台阶进行升降,以满足台阶之间不同高度差的测试要求。
附图说明
88.下面参照附图结合实施例对本实用新型作进一步的说明。
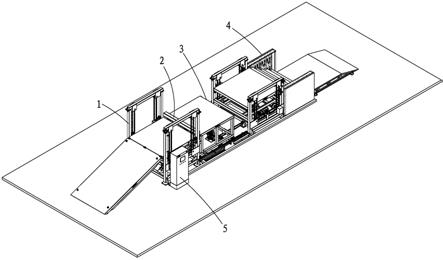
89.图1为本实用新型所述的测试系统实施例的立体图。
90.图2是本实用新型所述的测试系统实施例的主视图。
91.图3是本实用新型所述的测试系统实施例的的俯视图。
92.图4和图5是本实用新型所述的爬斜坡测试装置的立体图。
93.图6和图7是本实用新型所述的斜板的立体图。
94.图8和图9是本实用新型所述的第一升降平台的立体图。
95.图10是本实用新型所述的第一升降机构的立体图。
96.图11是图10中a的局部放大示意图。
97.图12是本实用新型所述的第一升降机构的立体图。
98.图13是图12中b的局部放大示意图。
99.图14是本实用新型所述的第一升降机构隐藏第一升降平台后的立体图。
100.图15是本实用新型所述的第一传动模块的立体图。
101.图16和图17是本实用新型所述的越路障测试装置的立体图。
102.图18是本实用新型所述的越路障测试装置和水平移动平台连接的立体图。
103.图19是本实用新型所述的越沟宽测试装置的立体图。
104.图20是图19中c的局部放大示意图。
105.图21和图22是本实用新型所述的越沟宽测试装置的立体图。
106.图23和图24是本实用新型所述的越沟宽测试装置和第二升降机构的立体图。
107.图25是本实用新型所述的爬台阶测试装置的立体图。
108.图26是本实用新型所述的垫高平台的爆炸图。
109.图27和图28是本实用新型所述的同步升降台阶的立体图。
110.图29是本实用新型所述的同步升降台阶的主视图。
111.图30是图29中的d
‑
d剖视图。
112.图31是本实用新型所述的链轮
‑
链条传动机构的立体图。
113.图32是本实用新型所述第二升降机构的立体图。
114.图33是本实用新型所述的第二升降机构隐藏第二升降平台后的立体图。
115.附图标记说明:
116.爬斜坡测试装置1,斜板11,连接块111,轮子112,
117.坡度调节装置12,第一升降机构121,第一支撑架1211,第一执行元件1212,第一滑动组1213,轮座12131,滚轮12132,椭圆孔12133,第一传动模块1214,第一减速机12141,第一转轴12142,第一主动链轮12143,第一从动链轮12144,第一链轮12145,第二链轮12146,第三链轮12147,第一链轮轴12148,第一链条连接张紧杆12149,第一链条121410,第一编码器1215,
118.第一升降平台122,连接板1221,固定架1222,调节通孔12221,支撑板12222,调节螺孔122221,转轴123,弹簧卡扣124,
119.越路障测试装置2,路障21,升降装置22,第二支撑架221,第二执行元件222,第二传动模块223,第二减速机2231,第一螺旋升降机2232,第一同步带轮2233,第二编码器2234,导向杆224,直线轴承225,
120.越沟宽测试装置3,宽度调节装置31,驱动装置311,第三执行元件3111,第三传动模块3112,第三减速机31121,第二主动链轮31122,第二从动链轮31123,第二转轴31124,转轴固定座31125,第四链轮31126,第五链轮 31127,第二链条连接张紧杆31128,第二链条31129,链轮固定座311210,第三编码器3113,水平移动平台312,第三支撑架313,轻轨314,轨道轮 315,
121.爬台阶测试装置4,同步升降台阶41,台阶411,第一台阶4111,第二台阶4112,第三台阶4113,第四台阶4114,第五台阶4115,第三升降机构 412,驱动电机4121,第五减速机4122,第四主动链轮4123,第四转轴4124,第四从动链轮4125,第四主动力链条4126,第二螺旋升降机4127,输入端 41271,输出丝杆41272,输出螺母41273,台阶框架413,台阶容纳空腔4131,导向轴414,直线轴承415,第九链轮4161,第十链轮4162,第四链条4163,第十一链轮4171,第十二链轮4172,第五链条4173,第十三链轮4181,第十四链轮4182,第六链条4183,第十五链轮4191,第十六链轮4192,第七链条4193,
122.同步升降支撑平台42,第二升降机构421,第四支撑架4211,第四执行元件4212,第二滑动组4213,第四传动模块4214,第四减速机42141,第三转轴42142,第三主动链轮42143,第三从动链轮42144,第六链轮42145,第七链轮42146,第八链轮42147,第二链轮轴42148,第三链条连接张紧杆42149,第三链条421410,第四编码器4215,第二升降平台422,
123.第五编码器43,编码器支座44,第二同步带轮45,垫高平台46,水平部461,斜坡部462;
124.控制器5。
具体实施方式
125.本实用新型的实用新型构思如下:
126.通过控制器5控制驱动装置311,来驱动水平移动平台312进行移动,从而调节水平移动平台312和所述同步升降支撑平台42的间距,从而适应不同沟宽的测试要求;通过控制器5控制同步升降支撑平台42和同步升降台阶41进行升降,以满足台阶411之间不同高度差的测试要求。四个测试装置可根据实际需要进行选择全部进行测试,或者选择其中某个或某几个去测试。
127.请参阅图1至图33所示。
128.实施例:
129.本实用新型的一种特种作业机器人越沟宽和爬台阶性能的测试系统用于特种作业机器人一体化性能的测试平台,和爬斜坡、越障碍性能测试装置组合起来使用。当然在其它实施例中,还可将所述的测试系统单独使用,用于越沟宽和爬台阶性能测试。
130.特种作业机器人一体化性能的测试平台,包括
131.爬斜坡测试装置1,包括斜板11和坡度调节装置12;所述坡度调节装置12包括第一升降机构121和第一升降平台122;所述第一升降平台122 连接于所述第一升降机构121的输出端,从而由所述第一升降机构121驱动所述第一升降平台122进行升降;所述斜板11的末端和第一升降平台122 的前端活动连接,在具体实施中,所述斜板11和第一升降平台122可通过铰接、轴承和轴、螺栓等方式连接;例如还可以采用附图所示的实施例中的结构,两者通过转轴连接,如图6至图9所示,在斜板11的上端设有连接块111,连接块111开设有轴孔;在第一升降平台122的前端设有连接板 1221,连接板1221也开设有轴孔;每个连接块111的两侧布置有两个连接板1221,用一转轴123嵌入三者的轴孔内,转轴123和轴孔采用间隙配合;在转轴的两端设有弹簧卡扣124,将转轴123两端限位住,从而实现所述斜板11和第一升降平台122活动连接;而所述斜板11和所述第一升降平台 122活动连接的作用是,可通过第一升降机构121调节第一升降平台122的高度,来调节斜板11和第一升降平台122的夹角,最终实现调节所述斜板 11的坡度,从而满足不同坡度的爬坡测试要求;
132.具体一爬坡测试方式:预设好控制程序,通过控制器5控制第一升降机构121驱动所述第一升降平台122进行升降,将第一升降平台122调节到对应的高度,从而将斜板11调节到所需的坡度,然后测试人员操控特种作业机器人从而斜板11底端向上爬坡,看其能否爬上所述第一升降平台122;
133.还可以进行半坡启动测试,操控特种作业机器人爬到斜板11上,然后特种作业机器人停机,然后操控其重新启动,进行爬坡,看其能否爬上第一升降平台122;
134.当该坡度测试完成后,可调节第一升降平台122的高度,将斜板调节到另一测试坡度,进行重新测试。
135.越路障测试装置2,包括路障21和升降装置22,所述升降装置22设置在所述第一升降平台122的后方;所述路障21连接于所述升降装置22的输出端,从而由所述升降装置22驱动所述路障21进行升降;所述路障21可根据需要设计成各种结构,如图16所示的实施例中,所述路障21为一横杆。在具体实施中,所述升降装置22可架设在地面、支撑物上,或者如图所示的实施例中,所述升降装置22还可以和所述水平移动平台312的第三支撑架固定在一起。
136.通过升降装置22驱动路障21进行升降,从而适应不同高度的路障的测试要求。
137.具体一越路障测试方式:
138.先通过控制器5控制第一升降机构121,将第一升降平台122的高度调节到和所述水平移动平台312等高;
139.然后,通控制器5控制所述驱动装置311,将所述水平移动平台312和升降装置22一起移动移动至最前端,和所述第一升降平台122相邻;
140.接着,通过控制器5控制升降装置22驱动路障21进行升降,至预定的高度;
141.最后,测试人员操控特种作业机器人从所述第一升降平台122往路障 21和水平移动平台312移动,看特种作业机器人是否能够越过所述路障21。测试完后,可根据需要,通过
控制器5将所述路障21降低到和所述水平移动平台312平齐,或位于水平移动平台312的下方。
142.越沟宽测试装置3,包括宽度调节装置31;所述宽度调节装置31包括驱动装置311和水平移动平台312;所述驱动装置311的输出端连接于所述水平移动平台312,从而由所述驱动装置311驱动所述水平移动平台312进行移动,进而调节水平移动平台312和第二升降平台之间的间距,即为沟宽;在本实施例中,所述水平移动平台312设置在所述升降装置22的后方;当然,在其它实施例中,例如所述的测试系统单独使用时,可在底面外凹槽,将所述的测试系统安装在凹槽内,而水平移动平台312和底面平齐,或者所述的测试系统也可直接安装在底面上,在水平移动平台312和底面之间搭一块连接斜板,测试时,连接斜板先不搭在水平移动平台上312,待水平移动平台312的位置调节好,达到预定的沟宽时,再搭连接斜板,然后操作特种作业机器人从连接斜板上移动到水平移动平台312上即可。当然在其它实施例中,还可以有其它布置方式。
143.具体一测试方式:先通过控制器5控制第二升降机构,将所述第二升降平台的高度调节到和所述水平移动平台312等高;
144.然后,通过控制器5控制所述驱动装置311,驱动所述水平移动平台312 移动,将所述水平移动平台312和所述第二升降平台的间距调节到预定的值,即为预定的沟宽;
145.接着,测试人员操控特种作业机器人从水平移动平台312往第二升降平台上移动,看特征作业机器人能否移动至第二升降平台上。
146.爬台阶测试装置4,包括同步升降台阶41和同步升降支撑平台42;所述同步升降支撑平台42包括第二升降机构421和第二升降平台422,所述第二升降机构421的输出端连接于所述第二升降平台422,从而由所述第二升降机构421驱动所述第二升降平台422进行升降,所述第二升降平台422 间隔设置在所述水平移动平台312的后方;所述同步升降台阶41包括若干个台阶411和第三升降机构412;所述第三升降机构412驱动若干个所述台阶411进行同步升降;若干个所述台阶411设置在所述第二升降平台422 的后方;各个所述台阶411进行同步升降,同步升降完成后,实现相邻台阶的高度差相等,从而满足相邻台阶不同高度差的测试要求。
147.而所述第二升降平台422作为爬台阶后的停放平台,同时其也可以作为最后一个台阶使用,这样可节约一个台阶,此时只需将第二升降平台422 和最高的所述台阶411的高度差,保持和其余相邻台阶的高度差相等即可。
148.具体一爬台阶测试方式:可根据需要进行下台阶或上台阶测试;
149.下台阶时:
150.先通过控制器5控制第二升降机构421、第三升降机构412进行工作,将第二升降平台422和各个所述台阶411调节到预定的高度,使得相邻的台阶高度差达到预定的测试要求;
151.然后,测试人人员操控特种作业机器人从第二升降平台422往各个所述台阶411移动,向下下台阶,看特种作业机器人的下台阶测试情况是否符合预定的要求;例如,看特种作业机器人是否会翻车。
152.上台阶时:
153.也先通过控制器5控制第二升降机构421、第三升降机构412进行工作,将第二升降
平台422和各个所述台阶411调节到预定的高度,使得相邻的台阶高度差达到预定的测试要求;
154.然后,测试人员操控特种作业机器人从最低的台阶向所述第二升降平台 422方向爬台阶,看能否爬上去。
155.而上台阶测试时,还可以和下台阶连着测试,即如果下台阶测试的高度差和上台阶的相同,则下台阶测试完成后,可操控特种作业机器人掉头直接进行爬台阶。
156.控制器5,与所述第一升降机构121、升降装置22、驱动装置311、第二升降机构421及第三升降机构412分别通信连接,从而实现由控制器进行控制。在具体一实施例中,所述控制器可采用plc,例如plc的型号为:西门子 6es7215
‑
1ag40
‑
0xb0。
157.在具体一实施例中,所述第一升降机构121包括
158.第一支撑架1211;
159.第一执行元件1212,所述第一执行元件1212的输出端连接于所述第一升降平台122;所述第一执行元件1212通信连接于所述控制器5;由所述控制器5控制第一执行元件1212工作,驱动第一升降平台122进行升降。
160.第一滑动组1213,所述第一滑动组1213滑动连接于所述第一支撑架1211;所述第一升降平台122固定连接于所述第一滑动组1213。通过第一滑动组1213对所述第一升降平台122的升降进行导向,提高升降方向的精准性。在具体一实施例中,如图8至图13所示,所述第一滑动组1213包括轮座12131,所述轮座12131内设有滚轮12132;所述轮座12131的两边开设有椭圆孔12133;所述第一升降平台122四边设有固定架1222,固定架 1222的底面开设有调节通孔12221,固定架1222设有一支撑板12222,支撑板12222开设有调节螺孔122221。所述轮座12131通过螺栓穿过所述椭圆孔12133、调节通孔12221后用螺母锁紧,而滚轮12132则贴合所述第一支撑架1211的内侧面,并通过螺丝锁入调节螺孔122221顶住轮座12131,进一步保证滚轮12132和第一支撑架1211的内侧面贴合。椭圆孔12133的结构,使得可以调节滚轮12132的位置,使其更贴合所述第一支撑架1211 的内侧面,这样可降低第一支撑架1211表面凹凸不平,造成的滚轮12131 和第一支撑架1211的内侧面脱离的情况发生;
161.在具体一实施例中,所述第一升降机构121还包括第一传动模块1214;所述第一执行元件1212的输出端连接于所述第一传动模块1214;所述第一传动模块1214还连接于所述第一升降平台122。通过所述第一传动模块1214 将第一执行元件1212的驱动力传递给所述第一升降平台122。
162.在具体一实施例中,所述第一升降机构121还包括第一编码器1215,所述第一编码器1215通信连接于所述控制器5;控制器5按照预定的程序,控制所述第一执行元件1212工作,所述第一编码器1215对第一转轴12142 的旋转圈数进行脉冲计数,第一编码器1215将脉冲数据发送给所述控制器 5,控制器5根据接收到的脉冲数据,即第一转轴12142的旋转圈数,调节第一执行元件1212的输出轴的旋转圈数,使得第一转轴12142的旋转圈数达到预定的数值,从而调节所述第一升降平台122至预定的高度,最终实现将所述斜板11调节至预定的坡度。
163.所述第一执行元件1212为电机;
164.所述第一传动模块1214包括第一减速机12141、第一转轴12142、第一主动链轮
12143、第一从动链轮12144、第一链轮12145、第二链轮12146、第三链轮12147、第一链轮轴12148、第一链条连接张紧杆12149、第一主动力链条(未图示)及第一链条121410;
165.所述第一链轮12145、第二链轮12146、第三链轮12147分别有4个;所述第一链轮12145、第二链轮12146、第三链轮12147的大小和齿数都相等;
166.所述第一链条121410有6根;所述第一链轮轴12148有6根;
167.所述第一链条连接张紧杆12149有8个;
168.所述第一执行元件1212的输出轴固定连接于所述第一减速机12141的输入端;所述第一主动链轮12143固定套在所述第一减速机12141的输出轴上;在具体一实施例中,所述第一主动链轮12143、第一从动链轮12144分别可采用双排链轮;当然在其它实施例中,也可采用单排链轮;
169.所述第一从动链轮12144、两所述第一链轮12145和两所述第二链轮 12146都固定套在第一转轴12142上;所述第一转轴12142旋转地连接于所述第一支撑架1211,所述第一编码器1215连接于所述第一转轴12142;在具体实施中,第一链轮12145和第二链轮12146可采单排链轮,或者两者合起来也可以采用双排链轮替代,附图所示的实施中,采用的是双排链轮。在具体一实施中,所述第一链轮12145、第二链轮12146、第一从动链轮12144 分别通过键连接于第一转轴12142上,其中,第一链轮12145和第二链轮 12146两个为一组,呈对称布置;第一转轴12144的两端分别套上轴承,轴承安装在轴承座内,轴承座则通过螺丝锁紧在所述第一支撑架1211的侧面;第一编码器1215通过支架安装在所述第一支撑架1211的侧面,同时第一编码器1215的旋转输出端则通过簧片式联轴器固定连接于第一转轴12142。
170.所述第一主动链轮12143和第一从动链轮12144分别与所述第一主动力链条(未图示)啮合;
171.6根所述第一链轮轴12148旋转地连接于所述第一支撑架1211,在具体一实施例中,如图12和图15所示,每个第一链轮轴1211的两端嵌入一支撑竖板的穿孔内,支撑竖板则固定连接于第一支撑架1211,第一链轮轴 12148和穿孔采用间隙配合,在第一链轮轴12148的两端面固定连接有被动轮垫片,避免第一链轮轴12148从穿孔内脱落,且每所述第一链轮轴12148 和所述第一转轴12142平行;
172.其中两根所述第一链轮轴12148和所述第一转轴12142等高布置,并位于所述第一升降平台122下方,且每根所述第一链轮轴12148固定套设有一所述第二链轮12146和一所述第三链轮12147;
173.另外四根所述第一链轮轴12148呈矩形等高布置在所述第一支撑架 1211的顶部,并位于所述第一升降平台122的上方;
174.所述第一支撑架1211的顶部的其中两根所述第一链轮轴12148,和所述第一转轴12144位于同一竖直平面内,且每所述第一链轮轴12148固定套设有一所述第一链轮12145;
175.所述第一支撑架1211的顶部的另外两根第一链轮轴12145,和第一升降平台122下方的两所述第一链轮轴12148位于同一竖直平面内,且每所述第一链轮轴12148固定套设有一所述第三链轮12147;
176.其中,所述第一升降平台122上方和下方的所述第一链轮12145一一对应和一所述第一链条12140啮合,且每所述第一链条121410固定连接有两所述第一链条连接张紧杆12149;
177.所述第一转轴12142上的所述第二链轮12146和等高布置的第一链轮轴 12148上的所述第二链轮12146一一对应和一所述第一链条121410啮合;
178.所述第一升降平台122上方和下方的所述第三链轮12147一一对应和一所述第一链条121410啮合,且每所述第一链条121410固定连接有两所述第一链条连接张紧杆12149;
179.8个所述第一链条连接张紧杆12149还分别固定连接于所述第一升降平台122。
180.所述第一传动模块1214的工作原理:所述第一执行元件1211的输出轴旋转,带动所述第一主动链轮12143旋转,然后带动所述第一从动链轮12144 旋转,进而带动所述第一转轴12142及其上的第一链轮12145和第二链轮 12146旋转;第一链轮12145通过链轮啮合传动来带动另一第一链轮12145 及竖直布置的第一链条121410转动,从而通过所述第一链条连接张紧杆12149来带动第一升降平台122进行升降;第二链轮12146通过链轮啮合传动带动另一等高布置的第二链轮12146进行传动,再带动第三链轮12147 进行旋转,从而带动竖直布置的第一链条121410转动,最终带动和其连接的第一链条连接张紧杆12149上下运动。第一升降平台122通过对称布置的 8个第一链条连接张紧杆12149带动,进行升降;从而实现平稳升降。
181.在具体一实施例中,所述斜板11的前端底面还设有轮子112,且所述轮子112的旋转轴线沿左右方向水平布置。设置所述轮子112,便于所述斜板11的移动,降低摩擦力。如图6所示,在具体一实施例中,还可在所述斜板上设置吊环,便于组装时,吊装所述斜板11。
182.在具体一实施例中,所述升降装置22包括
183.第二支撑架221;
184.第二执行元件222,所述第二执行元件222固定连接于所述第二支撑架221上;所述第二执行元件222的输出端连接于所述路障21;所述第二执行元件222还通信连接于所述控制器5。通过控制器5控制所述第二执行元件 222工作,从而带动所述路障21进行升降。
185.在具体一实施例中,所述升降装置22还包括第二传动模块223;所述第二执行元件222连接于所述第二传动模块223,所述第二传动模块223还连接于所述路障21。所述第二执行元件222工作,带动第二传动模块223 运动,从而带动所述路障21进行升降。
186.在具体一实施例中,所述第二传动模块223包括
187.第二减速机2231,所述第二减速机2231为双输出轴;所述第二减速机 2231的输入端固定连接于所述第二执行元件222的输出端;
188.第一螺旋升降机2232,所述第一螺旋升降机2232有两个;所述第二减速机2231的输出轴一一对应固定连接于一所述第一螺旋升降机2232的输入端;两所述第一螺旋升降机2232的输出端分别固定连接于所述路障21;
189.第一同步带轮2233,所述第一同步带轮2233有两个,两所述第一同步带轮2233的大小可不同,其中一个所述第一同步带轮2233固定套在所述第二减速机2231的一输出轴上;
190.第二编码器2234,另一所述第一同步带轮2233固定连接于所述第二编码器2234;所述第二编码器2234通信连接于所述控制器5;所述第二编码器5还旋转地连接于所述第二支撑架221上;
191.第一同步带(未图示),所述第一同步带(未图示)套设在两所述第一同步带轮2233上;
192.其中,所述第二执行元件222为电机。
193.工作原理:第二执行元件22的输出轴旋转,驱动第二减速机2231工作,从而由第二减速机2231的输出轴来带动第一螺旋升降机2232进行工作,第一螺旋升降机2232的输出轴上下运动,最终带动所述路障21进行升降。其中,第二编码器2234通过脉冲计数,检测所述第二减速机2231的输出轴的旋转圈数,而第二编码器2234通过脉冲信号将第二减速机2231的输出轴的旋转圈数反馈给控制器5,控制器5根据接收到的脉冲数据,发送信号给第二执行元件222,调节第二执行元件222的转速,最终实现调节所述第二减速机2231的旋转圈数至预定的要求,从而调节所述路障21升降的高度。
194.在具体一实施例中,所述升降装置22还包括
195.导向杆224,所述导向杆224有两根,两所述导向杆224的顶端固定连接于所述路障21;通过所述导向杆224对所述路障21的升降进行导向,提高运动精度。
196.直线轴承225,直线轴承225有两个,两直线轴承225固定连接于所述第二支撑架221上;所述导向杆224还一一对应嵌入直线轴承225内。
197.在具体实施中,所述升降装置22可单独架设在地面或者其它支撑物上;如图所示的实施例中,所述升降装置22的第二支撑架221固定连接于所述第三支撑架313。
198.在具体一实施例中,所述宽度调节装置31还包括
199.第三支撑架313;所述水平移动平台312固定连接于所述第三支撑架313 的顶部;
200.轻轨314,所述轻轨314有两条,两所述轻轨314沿前后方向平行铺设;
201.轨道轮315,所述轨道轮315至少有四个,且为偶数个;所述轨道轮315 呈对称布置且旋转地连接于所述第三支撑架313;每所述轨道轮315还滚动连接于所述轻轨314。
202.通过所述轻轨314和轨道轮315对所述第三支撑架313的水平运动进行导向,保证运动精度。
203.在具体一实施例中,所述驱动装置311包括第三执行元件3111,所述第三执行元件3111的输出端连接于所述第三支撑架313。由所述第三执行元件3111驱动所述第三支撑架313进行水平运动。
204.在具体一实施例中,所述驱动装置311还包括第三传动模块3112,所述第三执行元件3111的输出端连接于所述第三传动模块3112;所述第三传动模块3112连接于所述第三支撑架313。由所述第三执行元件3111驱动第三传动模块3112运动,进而带动第三支撑架313进行水平移动。
205.在具体一实施例中,所述第三执行元件3111为电机;
206.所述驱动装置311还包括第三编码器3113;所述第三编码器3113还通信连接于所述控制器5;
207.所述第三传动模块3112包括第三减速机31121、第二主动链轮31122、第二从动链轮31123、第二转轴31124、转轴固定座31125、第四链轮31126、第五链轮31127、第二链条连接张紧杆31128、第二链条31129、第二主动力链条(未图示)及链轮固定座311210;
208.所述第四链轮31126和第五链轮31127的大小和齿数分别相等;
209.所述第四链轮31126有两个;
210.所述第五链轮31127有两个;
211.所述第二链条连接张紧杆31128有4个;
212.所述第二链条31129有两个;
213.所述链轮固定座311210有两个;每所述链轮固定座311210上设有旋转轴311211;
214.所述第三执行元件3111的输出轴固定连接于所述第三减速机31121的输入端;
215.所述第三减速机31121的输出轴固定套设有所述第二主动链轮31122;
216.所述第二转轴31124上固定套设有所述第二从动链轮31123和第四链轮 31126;所述第二转轴31124的两端分别旋转地连接有一所述转轴固定座 31125;所述第三编码器3113连接于所述第二转轴31124;
217.所述第五链轮31127一一对应固定套在所述旋转轴311211上;且所述第四链轮31126和第五链轮31127等高布置,两所述第四链轮31126和两所述第五链轮31127呈矩形布置;
218.每所述第二链条31129分别套在一所述第四链轮31126和一所述第五链轮31127上;
219.每所述第二链条31129固定连接有两所述第二链条连接张紧杆31128,且4个所述第二链条连接张紧杆31128还分别固定连接于所述第三支撑架 313。
220.在具体实施中,所述链轮固定座311210可安装在底面上,当然也可以安装其它支撑物上。
221.工作原理:控制器5控制第三执行元件3111工作,所述第三执行元件 3111的输出轴旋转,驱动第三减速机31121工作,带动所述第二主动链轮 31122旋转,然后带动所述从第二动链轮31123、第二转轴31124、第四链轮31126旋转,从而带动所述第二链条31129运动,最终带动第二链条连接张紧杆31128水平移动,从而实现带动所述水平移动平台312进行水平移动,从而调节所述水平移动平台312和第二升降平台422之间的间距,即模拟沟宽。
222.在具体一实施例中,所述第二升降机构421包括
223.第四支撑架4211;
224.第四执行元件4212,所述第四执行元件4212的输出端连接于所述第二升降平台422;所述第四执行元件通信连接于所述控制器;
225.第二滑动组4213,所述第二滑动组滑动连接于所述第四支撑架4211;所述第二升降平台422固定连接于所述第二滑动组4213。通过所述第二滑动组4213对所述第四执行元件4212的升降进行导向,使得运动更精确、平稳。在具体一实施中,所述第二滑动组4213和第一滑动组1213采用相同的结构。
226.在具体一实施例中,所述第二升降机构421还包括第四传动模块4214;所述第四执行元件4212的输出端连接于所述第四传动模块4214;所述第四传动模块4214还连接于所述第二升降平台422。所述第四执行元件4212驱动所述第四传动模块4214,进而带动所述第二升降平台进行升降运动。
227.在具体一实施例中,所述第二升降机构421还包括第四编码器4215,所述第四编码器4215通信连接于所述控制器5;
228.所述第四执行元件4212为电机;
229.所述第四传动模块4214包括第四减速机42141、第三转轴42142、第三主动链轮42143、第三从动链轮42144、第六链轮42145、第七链轮42146、第八链轮42147、第二链轮轴42148、第三链条连接张紧杆42149、第三主动力链条(未图示)及第三链条421410;在附图所
示的实施例中,所述第二升降机构421和第一升降机构121采用相同的结构,第二升降机构421 的升降原理参见第一升降机构121的。第四传动模块4214和第一传动模块 1214采用相同的传动结构。
230.所述第六链轮42145、第七链轮42146、第八链轮42147分别有4个;所述第六链轮42145、第七链轮42146、第八链轮42147的大小和齿数都相等;
231.所述第三链条421410有6根;
232.所述第二链轮轴42148有6根;
233.所述第三链条连接张紧杆42149有8个;
234.所述第四执行元件4212的输出轴固定连接于所述第四减速机42141的输入端;所述第三主动链轮42143固定套在所述第四减速机42141的输出轴上;
235.所述第三转轴42142旋转地连接于所述第四支撑架4211上;所述第四编码器4215连接于所述第三转轴42142;
236.所述第三从动链轮42144、两所述第六链轮42145和两所述第七链轮 42146都固定套在第三转轴42142上;在具体一实施中,所述第六链轮42145、第七链轮42146、第三从动链轮42144分别通过键连接于第三转轴42142上,其中,第六链轮42145和第七链轮42146两个为一组,呈对称布置;第三转轴42142的两端分别套上轴承,轴承安装在轴承座内,轴承座则通过螺丝锁紧在所述第四支撑架4211的侧面;第四编码器4215通过支架安装在所述第四支撑架4211的侧面,同时第四编码器4215则通过簧片式联轴器固定连接于第三转轴42142。
237.所述第三主动链轮42143和第三从动链轮42144分别与所述第三主动力链条(未图示)啮合;
238.6根所述第二链轮轴42148旋转地连接于所述第四支撑架4211,且每所述第二链轮轴42148和所述第三转轴42142平行;
239.其中两根所述第二链轮轴42148和所述第三转轴42144等高布置,并位于所述第二升降平台422下方,且每根所述第二链轮轴42148固定套设有一所述第七链轮42146和一所述第八链轮42147;
240.另外四根所述第二链轮轴42148呈矩形等高布置在所述第四支撑架 4211的顶部,并位于所述第二升降平台422的上方;
241.所述第四支撑架4211的顶部的其中两根所述第二链轮轴42148,和所述第三转轴42142位于同一竖直平面内,且每所述第二链轮轴42148固定套设有一所述第六链轮42145;
242.所述第四支撑架4211的顶部的另外两根第二链轮轴42148,和第二升降平台422下方的两所述第二链轮轴42148位于同一竖直平面内,且每所述第二链轮轴42148固定套设有一所述第八链轮42147;
243.其中,所述第二升降平台422上方和下方的所述第六链轮42145一一对应套上一所述第三链条421410,进行啮合连接,且每所述第三链条421410 固定连接有两所述第三链条连接张紧杆42149;
244.所述第三转轴42142上的所述第七链轮42146和等高布置的第二链轮轴 42148上的所述第七链轮42146一一对应套上一所述第三链条421410,进行啮合连接;
245.所述第二升降平台422上方和下方的所述第八链轮42147一一对应套上一所述第三链条421410,且每所述第三链条421410固定连接有两所述第三链条连接张紧杆42149;
246.8个所述第三链条连接张紧杆42149还分别固定连接于所述第二升降平台422。
247.所述第四传动模块4214的工作原理:所述第四执行元件4212的输出轴旋转,带动所述第三主动链轮42143旋转,然后带动所述第三从动链轮42144 旋转,进而带动所述第三转轴42142及其上的第六链轮42145和第七链轮 42146旋转;第六链轮42145通过链轮啮合传动来带动另一第六链轮42145 及第三链条转动(未图示),从而通过所述第三链条连接张紧杆42149来带动第二升降平台422进行升降;第七链轮42146通过链轮啮合传动带动另一等高布置的第七链轮42146进行传动,再带动第八链轮42147进行旋转,从而带动第三链条421410转动,最终带动和其连接的第三链条连接张紧杆 42149上下运动。第二升降平台422通过对称布置的8个第三链条连接张紧杆421410带动,进行升降;从而实现平稳升降。
248.在具体一实施例中,所述第三升降机构412包括
249.驱动电机4121;所述驱动电机4121通信连接于所述控制器5;
250.第五减速机4122;所述驱动电机4121的输出轴连接于所述第五减速机 4122的输入端;
251.第四主动链轮4123,所述第四主动链轮4123固定套在所述第五减速机 4122的输出轴上;
252.第四转轴4124;
253.第四从动链轮4125,所述第四从动链轮4125固定套在所述第四转轴 4214上;
254.第四主动力链条4126,所述第四主动力链条4126和所述第四主动链轮 4123与第四从动链轮4125啮合;
255.第二螺旋升降机4127,每所述第二螺旋升降机4127包括输入端41271、输出丝杆41272和输出螺母41273;所述输出丝杆41272和输出螺母41273 连接在一起;所述第二螺旋升降机4127的数量等于所述台阶411的数量;每所述台阶411的两端一一对应固定连接于两所述输出螺母41273,且所述输出丝杆41272穿透所述台阶411,所述输出丝杆4212呈竖直布置;其中一所述台阶411对应的两所述第二螺旋升降机4127的输入端一一对应固定连接于所述第四转轴4214的两端;同一侧的相邻的两所述第二螺旋升降机 4127的输入端通过链轮
‑
链条传动机构连接在一起,且各个链轮
‑
链条传动机构的链轮齿数相同或不同。
256.在具体一实施例中,还包括
257.台阶框架413,所述台阶框架413具有一台阶容纳空腔4131;每所述第二螺旋升降机4127固定连接于所述台阶框架413;各个所述台阶411位于所述台阶容空腔4131内;
258.导向轴414,所述导向轴414固定连接于所述台阶框架413;
259.直线轴承415,直线轴承415的数量等于所述导向轴414的数量;所述导向轴414一一对应嵌入直线轴承415的内圈;每所述台阶411的两端分别固定连接有直线轴承415,且所述导向轴414穿透所述台阶411,所述导向轴414呈竖直布置。
260.在具体一实施例中,所述台阶411有5个,5个所述台阶411从低到高依次命名为:第一台阶4111、第二台阶4112、第三台阶4113、第四台阶4114 和第五台阶4115;
261.所述第二螺旋升降机4127有10个;
262.所述链轮
‑
链条传动机构包括两个第一链轮
‑
链条传动机构、两个第二链轮
‑
链条传动机构、两个第三链轮
‑
链条传动机构和两个第四链轮
‑
链条传动机构;在附图所示的实施例中,所述同步升降台阶41为轴对称结构,以台阶的中线为对称轴。
263.每所述第一链轮
‑
链条传动机构包括第九链轮4161、第十链轮4162和第四链条4163;所述第九链轮4161的齿数为12;所述第十链轮4162的齿数为15;
264.每所述第二链轮
‑
链条传动机构包括第十一链轮4171、第十二链轮4172 和第五链条4173;所述第十一链轮4171的齿数为15;所述第十二链轮4172 的齿数为20;
265.每所述第三链轮
‑
链条传动机构包括第十三链轮4181、第十四链轮4182 和第六链条4183;所述第十三链轮4181的齿数为10;所述第十四链轮4182 的齿数为15;
266.每所述第四链轮
‑
链条传动机构包括第十五链轮4191、第十六链轮4192 和第七链条4193;所述第十五链轮4191的齿数为15;所述第十六链轮4192 的齿数为15;
267.其中,每所述台阶411的两边分别用一个所述第二螺旋升降机4127进行升降;
268.升降所述第一台阶4111的两所述第二螺旋升降机4127的输入端分别固定连接有一所述第十六链轮4192;
269.升降所述第二台阶4112的两所述第二螺旋升降机4127的输入端分别固定连接有一所述第十四链轮4182和一所述第十五链轮4191;其中位于同一边的所述第十六链轮4192和第十五链轮4191分别和一所述第七链条4193 啮合;
270.升降所述第三台阶4113的两所述第二螺旋升降机4127的输入端一一对应固定连接于所述第五减速机4122的输出轴;且这两个所述第二螺旋升降机4127的输入端分别固定连接于有一所述第十二链轮4172和一所述第十三链轮4181;其中位于同一边的所述第十四链轮4182和第十三链轮4181分别和一所述第六链条4183啮合;
271.升降所述第四台阶4114的两所述第二螺旋升降机4127的输入端分别固定连接有一所述第十链轮4162和一所述第十一链轮4171;其中位于同一边的所述第十二链轮4172和第十一链轮4171分别和一所述第五链条4173啮合;
272.升降所述第五台阶4115的两所述第二螺旋升降机4127的输入端分别固定连接有一所述第九链轮4161;其中位于同一边的所述第九链轮4161和第十链轮4162分别和一所述第四链条4163啮合。
273.各个台阶的链轮
‑
链条传动机构,当然在其它实施例中,也可以采用同步带传动、或齿轮传动等传动方式。采用上述齿数,之所以可以实现同步升降的原因是:
274.各个台阶411同步升降的定义:在同样的时间内,每个台阶411要同时完成升降,达到指定高度,使得相邻台阶411的高度差相等且等于预定的高度差;
275.假设初始时,相邻台阶411的高度差在为h1,多级台阶411同步升降:在相同的时间内,达到各台阶411高度差一致,那么各台阶411升降行程不一样,
276.那么,第一阶台阶离地高度为h1,第二阶台阶离地高度就2h1,第三阶台阶离地高度为3h1,第四阶台阶离地高度为4h1,第五阶台阶离地高度为5h1
……
以此类推,第n阶台阶离地高度为nh1;
277.若相邻台阶411需达到的预定的高度差为h2时,其中,h2和h1的单位相同,例如,单位为mm。
278.第一阶台阶离地高度为h2,第二阶台阶离地高度为2h2,第三阶台阶离地高度为3h2,第四阶台阶离地高度为4h2,第五阶台阶离地高度为5h2;
279.那么可以得出:高度差从h1升降到h2,第一阶台阶需要升降的高度为h2
‑
h1,第二阶升降需升降的高度为2h2
‑
2h1,第三阶需升降的高度为 3h2
‑
3h1,第四阶需升降的高度为
4h2
‑
4h1,第五阶需升降的高度为 5h2
‑
5h1
……
以此类推,第n阶台阶需升降的高度为nh2
‑
nh1;其中,各个台阶只能同步上升或同步下降,因此,各个台阶所需升降的高度若为正,则表明为上升;若为负,则为下降;因此,可得出各个台阶所需升降的高度比为:1:2:3:4:5
……
:n,为等比数列;
280.例如:以5级台阶为例,假设每级台阶高度差在120mm,
281.第一阶台阶离地120mm,第二阶台阶离地就240mm,第三阶台阶离地 360mm,
282.第四阶台阶离地480mm,第五阶台阶离地600mm。
283.若高度差升降到200时,
284.第一阶台阶离地200mm,第二阶台阶离地就400mm,第三阶台阶离地600mm,
285.第四阶台阶离地800mm,第五阶台阶离地1000mm。
286.那么可以得出:高度差从120mm升到200mm,第一阶台阶需要升降 80mm,第二阶升降160mm,第三阶升降240mm,第四阶升降320mm,第五阶升降400mm。
287.由于是同步升降,因此时间t相同,根据路程公式s=vt,将t和高度差代入公式,那么可以得出:
288.第一阶台阶速度假定为x,第二阶台阶速度则为2x,第三阶台阶速度则为3x,第四阶台阶速度则为4x,第五阶台阶速度则为5x
……
以此类推,第 n阶台阶速度为nx;在具体一实施例中,各个台阶的速度单位采用mm/s;第五减速机输出转速的单位为r/s,第二螺旋升降机4127导程的单位为mm;在其它实施例中,还可以采用其它的单位,单位发生变化只需要进行单位换算即可。
289.假定第五减速机输出转速为a,例如单位为r/s;
290.各台阶的第二螺旋升降机4127速比都为b;
291.第二螺旋升降机4127导程为c,例如单位为mm;
292.链轮
‑
链条传动的输入输出比:第一阶为d1;第二阶为d2;第三阶为 d3,第四阶为d4;第五阶为d5;
……
以此类推,第n阶为dn;
293.那么可以得出:
294.第一阶台阶的速度x=(a/b/d1)*c;
295.第二阶台阶的速度2x=(a/b/d2)*c;
296.第三阶台阶的速度3x=(a/b/d3)*c;
297.第四阶台阶的速度3x=(a/b/d4)*c;
298.第五阶台阶的速度4x=(a/b/d5)*c
299.……
以此类推,第n阶台阶的速度为nx==(a/b/dn)*c。
300.假设,从低到高排序,所述第五减速机4122连接于第三个台阶的第二螺旋升降机;则此时,第三阶为直连,d3=1;
301.通过3组联立方程组:3x=(a/b/d3)*c,
……⑴
302.x=(a/b/d1)*c,
……⑵
303.d3=1,
……⑶
304.可以得出d1=3*d3=3;
305.以此类推得出d2=1.5*d3=1.5;
306.d4=0.75*d3=0.75;
307.d5=0.6*d3=0.6;
308.……
309.dn=3/n;
310.即各个链轮
‑
链条传动的输入输出比须符合上述比值,从而保证各个台阶同步升降,达到预定的高度差;
311.以此类推,当所述第五减速机4122和某个台阶411直连时,则该台阶 411的链轮
‑
链条传动的输入输出为1,再代入方程组进行计算。
312.由此可以计算得出:
313.一、在各台阶411第二螺旋升降机4127速比一致的情况下:
314.例如,假设第三阶与第二阶传动用的链轮,其中第三阶的链轮的齿数为 10齿,那么第二阶的链轮齿数则为15齿,第二阶和第一阶传动用的链轮,其中第二阶的链轮为15齿,第一阶的链轮用30齿;
315.假设第三阶与第四阶传动用的链轮,其中第三阶的链轮齿数为20齿,那么第四阶就用15齿;第四阶和第五阶传动用的链轮,其中第四阶的齿数为15齿,第五阶用12齿;
316.只要满足各台阶速比的情况下,齿数也可以有其他组合。不仅限于当前齿数。在具体实施中,可根据需求按照上述输入输出速比的比值去选取链轮的规格。
317.二、在各台阶411第二螺旋升降机4127速比不一致的情况下,
318.例如,假定第一阶台阶螺旋升降速比为12;
319.第二阶台阶螺旋升降速比为6;
320.第三阶台阶螺旋升降速比为6;
321.第四阶台阶螺旋升降速比为6;
322.第五阶台阶螺旋升降速比为6;
323.假设第三阶与第二阶传动用的链轮,其中第三阶的链轮用10齿,那么第二阶就用15齿;第二阶和第一阶传动用的链轮,第二阶用15齿,第一阶用15齿;
324.假设第三阶与第四阶传动用的链轮,其中第三阶的链轮齿数为20齿,那么第四阶就用15齿;第四阶和第五阶传动用的链轮,其中第四阶的齿数为15齿,第五阶用12齿;
325.由此可以得出:第二螺旋升降机速比变化,链轮
‑
链条传动的输入输出比也会随着变化,那么,螺旋升降速比和链传动输入输出比是相对组合成立。达到台阶的同步上升和下降。
326.在具体一实施例中,还包括
327.第五编码器43;所述第五编码器43还通信连接于所述控制器5;
328.编码器支座44,所述第五编码器43固定在所述编码器支座44上;在具体实施中,所述编码器支座44可直接固定在地面上,或者还可以固定在其它支撑物体上,根据场地去布置即可。
329.第二同步带轮45,有两个,在具体实施中,两所述第二同步带轮45的大小可不同,如附图所示的实施中,两个第二同步带轮45的大小不同,其中一个所述第二同步带轮45固定套在所述第四转轴4124上;另一个所述第二同步带轮45固定套在所述第五编码器43上;
330.第二同步带(未图示);所述第二同步带(未图示)套在两所述第二同步带轮45上。
331.在具体一实施例中,还包括垫高平台46;所述垫高平台46包括相互连接的水平部
461和斜坡部462;所述水平部461设置在所述同步升降台阶41 的入口前。所述垫高平台46可根据布置场地去设置,根据场地的不同可选择设置所述垫高平台46,或者不设置所述垫高平台46。
332.虽然以上描述了本实用新型的具体实施方式,但是熟悉本技术领域的技术人员应当理解,我们所描述的具体的实施例只是说明性的,而不是用于对本实用新型的范围的限定,熟悉本领域的技术人员在依照本实用新型的精神所作的等效的修饰以及变化,都应当涵盖在本实用新型的权利要求所保护的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1