一种机器人用穿刺线夹快速拧紧装置的制作方法
1.本实用新型涉及电力机器人技术领域,具体涉及一种机器人用穿刺线夹快速拧紧装置。
背景技术:
2.出于经济的发展和生活水平的提高,企业和居民的用电不断增加,配电网面临升级改造进行扩容或者增加供电线路。如果断电铺设线路,则对扩容前的用户影响较大。带电作业机器人能够在不断电的情况下进行配网的施工、维修,具有极高的经济价值和社会价值。近年来带电作业机器人得到了较大的发展。
3.如中国专利cn110071406a,公开日2019年7月30日,一种配电网带电自动接线工具组及机器人,自动接线工具组包括架本体,夹持机构固定设置在架本体上,用于夹持接线机构,具有夹持接线机构的夹持端;线夹拧紧机构对应夹持机构的设置在支撑架上,用于驱动接线机构动作将主线和支线接通;主线固定机构和支线固定机构分别对应接线机构的设置在架本体上,用于固定主线和支线;断线机构对应接线机构的设置在架本体上,用于切断多余的支线;控制器分别与夹持机构、线夹拧紧机构、主线固定机构、支线固定机构和断线机构上的驱动机构连接,通过控制驱动机构控制夹持机构、线夹拧紧机构、主线固定机构和支线固定机构的动作;感应机构,与控制器信号连接。
4.但目前的接支线电力机器人在拧紧穿刺线夹时效率较低,快速拧紧两个穿刺线夹。因而需要对其进行改进。
技术实现要素:
5.本实用新型要解决的技术问题是:目前接支线电力机器人拧紧穿刺线夹效率低的技术问题。提出了一种机器人用穿刺线夹快速拧紧装置,能够方便搭载在接支线机器人上,提高拧紧穿刺线夹的效率。
6.为解决上述技术问题,本实用新型所采取的技术方案为:一种机器人用穿刺线夹快速拧紧装置,所述机器人包括机架、两个吊钩、吊把、两个吊绳、两个卷线轮、两个卷线驱动电机、控制器、电池和遥控装置,两个所述吊钩固定安装在吊把两端,两个所述卷线轮分别转动安装在机架两侧下部,卷线驱动电机驱动卷线轮转动,所述吊绳一端与吊钩固定连接,另一端卷绕在卷线轮上,所述控制器以及电池均安装在机架上,所述遥控装置与控制器通信连接,所述拧紧装置安装在机架上,所述拧紧装置包括拧紧电机、齿轮箱、齿轮组、拧紧杆和穿刺线夹座,所述齿轮箱以及穿刺线夹座均安装在机架上,穿刺线夹安装在所述穿刺线夹座上,所述拧紧电机安装在齿轮箱外侧,所述齿轮组安装在齿轮箱内,所述拧紧杆穿过齿轮箱与齿轮组连接,所述拧紧杆与穿刺线夹的拧紧螺钉连接,所述拧紧电机通过齿轮组与拧紧杆连接。将穿刺线夹安装在穿刺线夹座上,通过拧紧电机带动拧紧杆将穿刺线夹拧紧,能够快速完成穿刺线夹的拧紧固定,完成支线的连接。
7.作为优选,所述齿轮组包括两个传动齿轮、四个拧紧齿轮和主动齿轮,两个所述传
动齿轮均与主动齿轮啮合,四个拧紧齿轮两两一组,一组拧紧齿轮与一个传动齿轮啮合,所述传动齿轮的厚度大于两个拧紧齿轮的厚度和,所述拧紧齿轮与拧紧杆连接,所述主动齿轮与拧紧电机连接。四个拧紧齿轮能够同时拧紧两个穿刺线夹,提高穿刺线夹拧紧的效率。
8.作为优选,所述拧紧杆包括拧紧传动杆、弹簧和套筒,所述套筒一端与拧紧螺钉连接,所述套筒另一端开有方形槽,所述拧紧传动杆一端与拧紧齿轮连接,所述拧紧传动杆另一端呈方形,所述拧紧传动杆方形端与套筒的方形槽连接,所述弹簧放置在方形槽和拧紧传动杆之间,所述弹簧被压缩,所述拧紧传动杆方形端开有凹槽,所述套筒相应位置拧入螺钉,所述螺钉头部伸入所述凹槽。穿刺线夹的拧紧螺钉在拧紧过程中会逐渐前移,通过套筒和拧紧传动杆可以消除该影响。
9.作为优选,所述拧紧杆还包括传动环、挡圈、连接杆和棘爪,所述套筒远离拧紧传动杆的一端加工有台阶,所述台阶的外圆上加工有棘齿,所述传动环同心套在所述套筒外,所述传动环一端具有向内的翻边,所述传动环另一端连接挡圈,所述台阶位于挡圈和向内的翻边之间,所述传动环内圈加工有缺口,所述棘爪安装在所述缺口内,所述棘爪与棘齿配合,所述棘爪背面放置有弹性件,所述传动环与连接杆连接,所述连接杆与拧紧螺钉连接。两个拧紧齿轮连接的拧紧杆的棘爪方向不同。
10.本优选方案的工作方法为:拧紧电机正转,其中一个拧紧齿轮带动拧紧杆拧紧穿刺线夹,另一个拧紧杆空转,当第一个穿刺线夹被拧紧后,拧紧电机的线圈电流增大,此时拧紧电机反转,开始拧紧另一个穿刺线夹,从而在一个位置就可以拧紧两个穿刺线夹,提高两个穿刺线夹时的拧紧效率。
11.作为优选,所述拧紧杆还包括摩擦环、摩擦轮和压紧弹簧,所述传动环向内的翻边内侧安装摩擦环,所述连接杆远离拧紧螺钉的一端安装摩擦轮,所述摩擦环和摩擦轮抵接,所述压紧弹簧安装在摩擦轮和套筒的台阶之间。通过摩擦环和摩擦轮能够限制拧紧的最大扭矩,避免拧紧电机卡死。
12.作为优选,所述拧紧杆还包括批头和销钉,所述批头通过销钉与连接杆固定连接,所述连接杆通过批头与拧紧螺钉连接。
13.作为优选,所述穿刺线夹座包括静夹片、滑座、动夹片和滑轨,所述滑轨固定安装在机架上,所述滑座与滑轨卡接,所述静夹片与滑座固定连接,所述动夹片与滑座活动卡接,所述动夹片和滑座之间安装有弹性器件,所述弹性器件使动夹片趋向于靠近滑座。
14.作为优选,还包括两个驱动轮、两个驱动爪、闭合电机和驱动电机,两个所述驱动爪均转动安装在机架上,两个所述驱动爪底部通过齿轮啮合,所述闭合电机与其中一个驱动爪连接,两个所述驱动轮分别转动安装在两个驱动爪末端,所述驱动电机与其中一个驱动轮连接,所述驱动轮外圆覆盖橡胶层。
15.本实用新型的实质性效果是:将穿刺线夹安装在穿刺线夹座上,通过拧紧电机带动拧紧杆将穿刺线夹拧紧,能够快速完成穿刺线夹的拧紧固定,完成支线的连接;穿刺线夹的拧紧螺钉在拧紧过程中会逐渐前移,通过套筒和拧紧传动杆可以消除该影响;通过摩擦环和摩擦轮能够限制拧紧的最大扭矩。
附图说明
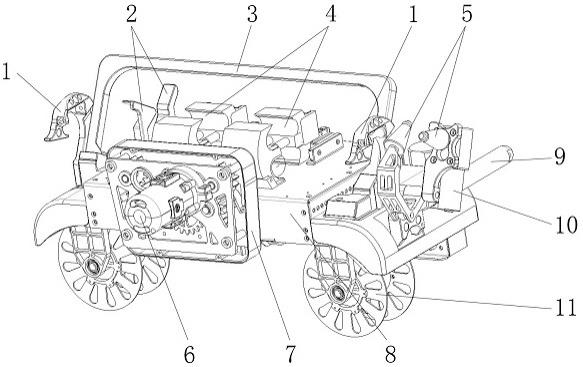
16.图1为实施例一安装位置示意图。
17.图2为实施例一齿轮箱安装位置示意图。
18.图3为实施例一齿轮组结构示意图。
19.图4为实施例一穿刺线夹座结构示意图。
20.图5为实施例一拧紧杆结构示意图。
21.其中:1、吊钩,2、导向柱,3、吊把,4、穿刺线夹,5、驱动轮,6、拧紧电机,7、齿轮组,8、机架,9、闭合电机,10、驱动电机,11、卷线轮,12、穿刺线夹座,13、支线固定夹,14、套筒,15、棘爪,16、压紧弹簧,17、摩擦轮,18、连接杆,19、批头,20、弹簧,21、挡圈,22、棘齿,23、摩擦环,24、销钉,401、穿刺夹块,402、拧紧螺钉,701、拧紧齿轮,702、传动齿轮,703、主动齿轮,704、齿轮箱板,705、拧紧传动杆,1201、静夹片,1202、滑座,1203、动夹片,1204、滑轨。
具体实施方式
22.下面通过具体实施例,并结合附图,对本实用新型的具体实施方式作进一步具体说明。
23.实施例一:
24.一种机器人用穿刺线夹4快速拧紧装置,如图1所示,机器人包括机架8、两个吊钩1、吊把3、两个吊绳、两个卷线轮11、两个卷线驱动电机10、控制器、电池和遥控装置,两个吊钩1固定安装在吊把3两端,两个卷线轮11分别转动安装在机架8两侧下部,卷线驱动电机10驱动卷线轮11转动,吊绳一端与吊钩1固定连接,另一端卷绕在卷线轮11上,控制器以及电池均安装在机架8上,遥控装置与控制器通信连接,拧紧装置安装在机架8上,如图2所示,拧紧装置包括拧紧电机6、齿轮箱、齿轮组7、拧紧杆和穿刺线夹座12,齿轮箱板705704以及穿刺线夹座12均安装在机架8上,穿刺线夹4安装在穿刺线夹座12上,穿刺线夹4包括两个穿刺夹块401和拧紧螺钉402,两个穿刺夹块401相互卡接,拧紧螺钉402与一个穿刺线夹4块转动连接,拧紧螺钉402与另一个穿刺线夹4块螺纹连接,拧紧电机6安装在齿轮箱外侧,齿轮组7安装在齿轮箱内,拧紧杆穿过齿轮箱与齿轮组7连接,拧紧杆与穿刺线夹4的拧紧螺钉402连接,拧紧电机6通过齿轮组7与拧紧杆连接。两个驱动爪均转动安装在机架8上,两个驱动爪底部通过齿轮啮合,闭合电机9与其中一个驱动爪连接,两个驱动轮5分别转动安装在两个驱动爪末端,驱动电机10与其中一个驱动轮5连接,驱动轮5外圆覆盖橡胶层。机架8上安装有导向柱2,导向柱2将目标导线向穿刺线夹座12上的穿刺线夹4引导。机架8上还安装有支线固定夹13,用于固定支线。
25.如图3所示,齿轮组7包括两个传动齿轮702、四个拧紧齿轮701和主动齿轮703,两个传动齿轮702均与主动齿轮703啮合,四个拧紧齿轮701两两一组,一组拧紧齿轮701与一个传动齿轮702啮合,传动齿轮702的厚度大于两个拧紧齿轮701的厚度和,拧紧齿轮701与拧紧杆连接,主动齿轮703与拧紧电机6连接。四个拧紧齿轮701能够同时拧紧两个穿刺线夹4,提高穿刺线夹4拧紧的效率。
26.如图4所示,穿刺线夹座12包括静夹片1201、滑座1202、动夹片1203和滑轨1204,滑轨1204固定安装在机架8上,滑座1202与滑轨1204卡接,静夹片1201与滑座1202固定连接,动夹片1203与滑座1202活动卡接,动夹片1203和滑座1202之间安装有弹性器件,弹性器件使动夹片1203趋向于靠近滑座1202。
27.如图5所示,拧紧杆包括拧紧传动杆、弹簧20和套筒14,套筒14一端与拧紧螺钉402
连接,套筒14另一端开有方形槽,拧紧传动杆一端与拧紧齿轮701连接,拧紧传动杆另一端呈方形,拧紧传动杆方形端与套筒14的方形槽连接,弹簧20放置在方形槽和拧紧传动杆之间,弹簧20被压缩,拧紧传动杆方形端开有凹槽,套筒14相应位置拧入螺钉,螺钉头部伸入凹槽。套筒14远离拧紧传动杆的一端加工有台阶,台阶的外圆上加工有棘齿22,传动环同心套在套筒14外,传动环一端具有向内的翻边,传动环另一端连接挡圈21,台阶位于挡圈21和向内的翻边之间,传动环内圈加工有缺口,棘爪15安装在缺口内,棘爪15与棘齿22配合,棘爪15背面放置有弹性件,传动环与连接杆18连接,连接杆18与拧紧螺钉402连接。两个拧紧齿轮701连接的拧紧杆的棘爪15方向不同。拧紧杆还包括摩擦环23、摩擦轮17和压紧弹簧2016,传动环向内的翻边内侧安装摩擦环23,连接杆18远离拧紧螺钉402的一端安装摩擦轮17,摩擦环23和摩擦轮17抵接,压紧弹簧2016安装在摩擦轮17和套筒14的台阶之间。批头19通过销钉24与连接杆18固定连接,连接杆18通过批头19与拧紧螺钉402连接。
28.拧紧电机6正转,其中一个拧紧齿轮701带动拧紧杆拧紧穿刺线夹4,另一个拧紧杆空转,当第一个穿刺线夹4被拧紧后,拧紧电机6的线圈电流增大,此时拧紧电机6反转,开始拧紧另一个穿刺线夹4,从而在一个位置就可以拧紧两个穿刺线夹4,提高两个穿刺线夹4时的拧紧效率。
29.本实施例的有益技术效果是:将穿刺线夹4安装在穿刺线夹座12上,通过拧紧电机6带动拧紧杆将穿刺线夹4拧紧,能够快速完成穿刺线夹4的拧紧固定,完成支线的连接;穿刺线夹4的拧紧螺钉402在拧紧过程中会逐渐前移,通过套筒14和拧紧传动杆可以消除该影响;通过摩擦环23和摩擦轮17能够限制拧紧的最大扭矩。
30.以上所述的实施例只是本实用新型的一种较佳的方案,并非对本实用新型作任何形式上的限制,在不超出权利要求所记载的技术方案的前提下还有其它的变体及改型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1