一种利用光电实现精确定位的机械手抓取装置的制作方法
一种利用光电实现精确定位的机械手抓取装置
【技术领域】
1.本实用新型涉及货物输送的技术领域,特别是一种利用光电实现精确定位的机械手抓取装置。
背景技术:
2.现有的货物抓取输送多采用光电开关进行一次定位,但是光电开关控制抓取货物的定位不够精准,而且不能够很好的适用部分中间有中心孔的货物,难以实现精确定位,现提出一种利用光电实现精确定位的机械手抓取装置。
技术实现要素:
3.本实用新型的目的就是解决现有技术中的问题,提出一种利用光电实现精确定位的机械手抓取装置,能够适用中间有孔的物体的抓取,定位准确。
4.为实现上述目的,本实用新型提出了一种利用光电实现精确定位的机械手抓取装置,包括输送支撑架、第二行走架、第二滑座、机械臂、机械手、货物中心孔检测光电开关、激光漫反射光电开关和上到位光电开关,所述输送支撑架呈对称设置,所述输送支撑架上方设有第一行走架,所述第二行走架可沿第一行走架的长度方向前后移动,所述第一行走架上沿其长度方向依次安装有前到位光电接近开关、前减速光电接近开关、后减速光电接近开关、后到位光电接近开关,用于控制第二行走架前后方向移动的粗定位,所述第二行走架上设有两个可沿其长度方向移动的机械手抓取机构,所述机械手抓取机构包括机械臂、以及安装于机械臂上的机械手,所述第二行走架内具有供机械臂伸出到下方的通腔,所述上到位光电开关安装于通腔朝向机械臂的一侧,所述机械臂上设有与上到位光电开关相配合的第一感应板,用于控制机械臂竖直方向升降的定位,所述货物中心孔检测光电开关设置于机械手的抓取机构上,所述激光漫反射光电开关对称设置于机械手的抓取机构的两侧,用于控制第二行走架前后方向移动的精定位。
5.作为优选,所述第一行走架上沿其长度方向设有第一导轨,第二行走架的两端分别设有与第一导轨相配合的第一滑座,所述第一滑座由伺服电机驱动,以控制第二行走架前后方向移动,所述第二行走架上沿其长度方向设有第二导轨,所述第二滑座与第二导轨相适配,所述用于控制机械臂上下方向移动的驱动升降机构,所述第二滑座由伺服电缸驱动,以控制机械臂左右方向移动。
6.作为优选,所述货物中心孔检测光电开关为激光对射型开关。
7.作为优选,所述机械手的抓取机构为插杆,用于抓取具有中心孔的货物,所述货物中心孔检测光电开关安装于插杆的中心处,所述插杆内开设有可供激光线穿透的中心孔。
8.作为优选,还包括控制系统,所述控制系统与前到位光电接近开关、前减速光电接近开关、后减速光电接近开关、后到位光电接近开关、货物中心孔检测光电开关、激光漫反射光电开关、上到位光电开关电性相连。
9.作为优选,所述通腔的一侧还设有与控制系统电性相连的上极限光电开关、下极
限光电开关,所述上极限光电开关、下极限光电开关分别设置于上到位光电开关的两侧,所述机械臂上设有与上极限光电开关、下极限光电开关相配合的第二感应板、第三感应板,所述第二感应板的高度低于第一感应板的高度,所述第三感应板的高度高于第一感应板的高度。
10.本实用新型的有益效果:本实用新型通过输送支撑架、第二行走架、第二滑座、机械臂、机械手、货物中心孔检测光电开关、激光漫反射光电开关和上到位光电开关等的配合,能够实现机械手前后行走方向粗略定位、提升方向定位、前后行走方向精确定位,从而保证了机械手精准定位。
11.本实用新型的特征及优点将通过实施例结合附图进行详细说明。
【附图说明】
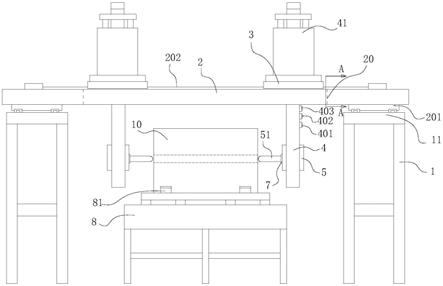
12.图1是本实用新型一种利用光电实现精确定位的机械手抓取装置的截面结构示意图;
13.图2是本实用新型一种利用光电实现精确定位的机械手抓取装置的右侧机械手的左视图;
14.图3是图1的aa向剖面示意图;
15.图4是各感应板在机械臂上位置的右视图。
【具体实施方式】
16.参阅图1至图3本实用新型一种利用光电实现精确定位的机械手抓取装置,包括输送支撑架1、第二行走架2、第二滑座3、机械臂4、机械手5、货物中心孔检测光电开关6、激光漫反射光电开关7和上到位光电开关9,所述输送支撑架1呈对称设置,所述输送支撑架1上方设有第一行走架11,所述第二行走架2可沿第一行走架11的长度方向前后移动,所述第一行走架11上沿其长度方向依次安装有前到位光电接近开关、前减速光电接近开关、后减速光电接近开关、后到位光电接近开关,用于控制第二行走架2前后方向移动的粗定位,所述第二行走架2上设有两个可沿其长度方向移动的机械手抓取机构,所述机械手抓取机构包括机械臂4、以及安装于机械臂4上的机械手5,所述第二行走架2内具有供机械臂4伸出到下方的通腔20,所述上到位光电开关9安装于通腔20朝向机械臂4的一侧,所述机械臂4上设有与上到位光电开关9相配合的第一感应板402,用于控制机械臂4竖直方向升降的定位,所述货物中心孔检测光电开关6设置于机械手5的抓取机构上,所述激光漫反射光电开关7对称设置于机械手5的抓取机构的两侧,用于控制第二行走架2前后方向移动的精定位。
17.进一步地,所述第一行走架11上沿其长度方向设有第一导轨,第二行走架2的两端分别设有与第一导轨相配合的第一滑座201,所述第一滑座201由伺服电机驱动,以控制第二行走架2前后方向移动,所述第二行走架2上沿其长度方向设有第二导轨202,所述第二滑座3与第二导轨202相适配,所述用于控制机械臂4上下方向移动的驱动升降机构41,所述第二滑座3由伺服电缸驱动,以控制机械臂4左右方向移动。
18.进一步地,所述货物中心孔检测光电开关6为激光对射型开关,激光漫反射光电开关7对称设置于货物中心孔检测光电开关6的两侧。
19.进一步地,所述机械手5的抓取机构为插杆51,用于抓取具有中心孔的货物10,所
述货物中心孔检测光电开关6安装于插杆51的中心处,所述插杆51内开设有可供激光线穿透的中心孔。
20.进一步地,还包括控制系统,所述控制系统与前到位光电接近开关、前减速光电接近开关、后减速光电接近开关、后到位光电接近开关、货物中心孔检测光电开关6、激光漫反射光电开关7、上到位光电开关9电性相连。
21.进一步地,参阅图4,所述通腔20的一侧还设有与控制系统电性相连的上极限光电开关21、下极限光电开关22,所述上极限光电开关21、下极限光电开关22分别设置于上到位光电开关9的两侧,所述机械臂4上设有与上极限光电开关21、下极限光电开关22相配合的第二感应板401、第三感应板403,所述第二感应板401的高度低于第一感应板402的高度,所述第三感应板403的高度高于第一感应板402的高度。
22.进一步地,还包括定位上料支撑架8,所述上料支撑架8设置于两个输送支撑架1之间靠近输入侧的一端,所述定位上料支撑架8的上方并排布置有若干个用于承托货物10的v字形定位托架81,所述货物10为圆柱体,且中心处具有中心孔。
23.本实用新型工作过程:
24.前后行走方向定位:放货及回原点时通过前到位光电接近开关、前减速光电接近开关、后减速光电接近开关、后到位光电接近开关可实现对第二行走架2的前后行走方向粗略定位,第二行走架2先移动至在定位上料支撑架8的上料工位的上方。
25.提升方向定位:取货时:通过货物中心孔检测光电开关6检测货物的最高点,控制机械臂下降至货物中心孔最高点平齐位置,完成初步定位。然后通过升降电机带的编码器下降一定的脉冲值(此值是固定的,此值的设定依据是中心孔直径的一半),此时机械臂下降至抓取工位,完成竖直方向的定位。下极限开关22用于其他光电失灵时的下降保护。
26.去放货时:货物完成抓取后,升降方向需要提升到上到位开关9的位置。上极限开关21用于其他光电失灵时的上升保护。
27.放货时:根据记录的取货时升降方向的编码器值、取货位置及放货位置的高度差(由于取放货的设备不同,所以会有高度差)计算出放货位置的编码器值,放货下降至计算的编码器值的高度。下极限开关22用于其他光电失灵时的下降保护。
28.回原点:货物放完后,升降方向需要提升到上到位开关9的位置。上极限开关21用于其他光电失灵时的上升保护。
29.前后行走方向取货时精确定位:提升与行走到位后,机械臂安装的两个激光漫反射光电开关7,可检测定位是否准确(偏哪边哪个光电亮),根据光电调整到最佳位置。
30.机械臂方向:通过伺服电缸控制机械手的抓取动作(插杆可插入到货物的中心孔内),前后行走与提升精确定位完成后,就可以实现抓取(此时需要记录抓取时提升方向的编码器值)。
31.上述实施例是对本实用新型的说明,不是对本实用新型的限定,任何对本实用新型简单变换后的方案均属于本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1