一种平边晶圆的主传送手臂的制作方法
1.本实用新型涉及晶圆传送手臂技术领域,特别是涉及一种平边晶圆的主传送手臂。
背景技术:
2.在现有的加工晶圆自动化设备中,最常用机械手臂作为取放晶圆的机构,此种机械手臂通常被制成薄型平板状的手臂,并在手臂表面设有供空气流通的气槽,当手臂接触到晶圆时,利用外在的真空源将手臂气槽中的空气抽除,以形成真空状态来达到吸取晶圆的目的。
3.现有技术中,6寸以下晶圆在传输过程中的定位通过单平边或双平边作为晶圆的定位边,从而标明晶体结构的晶向和导电类型,而6寸以下晶圆也通过不同类型定位边的机械手臂来进行运输,针对单平边与双平边需要专门的机械手臂进行传送,功能单一。
技术实现要素:
4.本实用新型的目的是提供一种平边晶圆的主传送手臂,结构简单,操作方便,传输效率高。
5.为实现上述目的,本实用新型提供了一种平边晶圆的主传送手臂,包括本体,所述本体为一体结构,所述本体的前端设有对称结构的夹持臂,其后端的固定部上对称设置有减重槽,所述夹持臂内部弧形结构的两端和中部均设有连接夹持头的卡槽,所述夹持头为一体的弧形结构,其内侧的中部设有水平置物部,所述置物部的等腰梯形结构两腰为向内凹陷的弧形结构;
6.所述夹持头的内侧设有向内凹陷的弧形凹槽,所述凹槽中部通过导向槽与所述置物部连接,所述凹槽外侧切线的竖直夹角小于所述导向槽外侧切线的竖直夹角。
7.优选的,所述减重槽包括对称设置依次分布的第一减重槽、第二减重槽和第三减重槽,所述第一减重槽、所述第二减重槽为对称设置的2个通孔,所述第三减重槽为对称结构的1个通孔。
8.优选的,所述夹持头通过螺钉连接在所述卡槽内。
9.优选的,所述本体的末端设有固定螺孔。
10.因此,本实用新型采用上述结构的一种平边晶圆的主传送手臂,结构简单,操作方便,传输效率高。
11.下面通过附图和实施例,对本实用新型的技术方案做进一步的详细描述。
附图说明
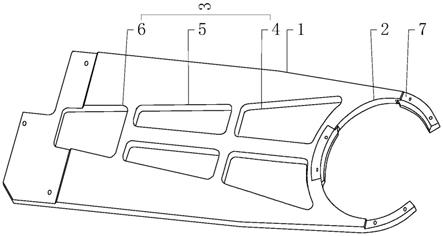
12.图1是本实用新型一种平边晶圆的主传送手臂实施例的示意图;
13.图2是本实用新型一种平边晶圆的主传送手臂中夹持头实施例的示意图;
14.图3是本实用新型一种平边晶圆的主传送手臂中导向槽的截面图。
15.附图标记
16.1、本体;2、夹持臂;3、减重槽;4、第一减重槽;5、第二减重槽;6、第三减重槽;7、卡槽;8、夹持头;9、置物部;10、凹槽;11、导向槽。
具体实施方式
17.下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
18.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
19.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上,除非另有明确的限定。
20.在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
21.在本发明中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平高度小于第二特征。
22.下面结合附图对本实用新型的实施方式做进一步的说明。
23.图1是本实用新型一种平边晶圆的主传送手臂实施例的示意图,图2是本实用新型一种平边晶圆的主传送手臂中夹持头实施例的示意图,图3是本实用新型一种平边晶圆的主传送手臂中导向槽的截面图,如图所示,一种平边晶圆的主传送手臂,包括本体1,本体1为一体结构,本体1的末端设有固定螺孔,本体1通过固定螺孔连接,实现固定。
24.本体1的前端设有对称结构的夹持臂2,夹持臂2的内侧为弧形结构,便于晶圆的固定。夹持臂2后端的固定部上对称设置有减重槽3,减重槽3用于减轻整体重量,减重槽3包括对称设置依次分布的第一减重槽4、第二减重槽5和第三减重槽6。第一减重槽4、第二减重槽5为对称设置的2个通孔,第三减重槽6为对称结构的1个通孔,其减重槽的结构设置保证夹持臂2前端受力部的承载强度,同时减轻整体的重量,保证快速、精准的进行晶圆的传送。
25.夹持臂2内部弧形结构的两端和中部均设有连接夹持头8的卡槽7,夹持头8通过螺
钉连接在卡槽7内。夹持头8为一体的弧形结构,其内侧的中部设有水平置物部9,置物部9用于晶圆的放置。置物部9的等腰梯形结构两腰为向内凹陷的弧形结构,置物部9的下底的水平边用于晶圆的平边放置,并且置物部9的两腰结构减轻整体重量,便于快速运输。
26.夹持头8的内侧设有向内凹陷的弧形凹槽10,凹槽10便于不同类型夹持头之间晶圆的取放。凹槽10中部通过导向槽11与置物部9连接,凹槽10外侧切线的竖直夹角小于导向槽11外侧切线的竖直夹角,导向槽11位于凹槽10的内侧,用于平边晶圆放置时的矫正,并且其结构用于晶圆的缓冲,放止造成损伤,保证单平边和双平边晶圆的稳定传送。
27.因此,本实用新型采用上述结构的一种平边晶圆的主传送手臂,结构简单,操作方便,传输效率高。
28.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进,这些改进也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1