构件更换装置的制作方法
1.本发明涉及用于将器具、夹紧件、托盘、夹具、机械加工对象物等构件相对于机器人臂、搬送机械的可动部分、作为固定台的工作台等构件装卸来进行更换的构件更换装置。
背景技术:
2.作为这种构件更换装置,以往存在下述的专利文献1所记载的构件更换装置。其现有技术如下构成。
3.专利文献1所记载的工具更换装置用于通过手动将夹具、器具、夹紧件等工具相对于夹具工位、机器人臂等作业本体机构装卸来进行更换,该工具更换装置具有:l字型的连结体,其形成有半圆形的卡合凹部;以及凸轮轴,其形成有与上述卡合凹部卡合的卡合凸轮。通过转动安装于该凸轮轴的一端的手柄而使凸轮轴转动,使上述卡合凹部与卡合凸轮卡合或者解除卡合。
4.现有技术文献
5.专利文献
6.专利文献1:日本特开2008
‑
272875号公报
技术实现要素:
7.发明所要解决的课题
8.在专利文献1所记载的现有技术中存在如下问题。
9.在专利文献1所记载的工具更换装置中需要用于使凸轮轴转动的手柄。若保持将手柄安装于凸轮轴的状态,则在安装于作业本体机构的工具的操作等中,手柄有时会成为障碍。另外,在将手柄从凸轮轴卸下而仅在工具更换时使用的情况下,需要进行未使用时的手柄的保管管理。
10.本发明的目的在于提供一种不使用手柄就能够进行构件的更换作业的结构的构件更换装置。
11.用于解决课题的方案
12.为了实现上述目的,本发明例如如图1a至图6所示,如下构成构件更换装置。
13.本发明的构件更换装置具备:第一板1,安装于第一构件8;第二板2,安装于第二构件5,且具有从外周缘部向轴向延伸的筒状壁部10;壳体3,经由所述第一板1安装于所述第一构件8,且直径比所述第二板2的直径小;多个操作销构件4,插入所述壳体3,且在所述第一板1侧具有楔面12c;以及施力部件13,配置在所述壳体3内,且向所述壳体3的径外方向对所述操作销构件4施力。在所述筒状壁部10的轴向的末端部形成有向该筒状壁部10的径内方向突出的卡合部10a,通过所述操作销构件4克服所述施力部件13的作用力而被压入所述壳体3内,所述楔面12c与所述卡合部10a的卡合被解除,能够从所述第一构件8拆卸所述第二构件5。
14.本发明的上述构件更换装置起到如下的作用效果。
15.通过将操作销构件压入壳体内,能够进行第二构件的拆卸,不使用手柄就能够进行第二构件的更换作业。
16.在本发明的上述构件更换装置中,例如,如图5a、图5b所示,也可以是,在所述壳体3的中央形成有凸部20,供所述凸部20嵌入的凹部6b形成于所述第二板件2的中央,嵌入形成在与所述第二板件2的中央不同的部位的销孔21的定位销22突出设置于所述壳体3。
17.根据该结构,第二板相对于壳体的周向的位置始终相同,其结果是,第二构件借助构件更换装置相对于第一构件的周向的固定位置被确定。
18.另外,在本发明的上述构件更换装置中,也可以是,嵌入所述销孔21的所述定位销22的末端部23形成为以下的形状:在所述第二板2的周向上与所述销孔21的内壁面接触,在所述第二板2的径向上在与所述销孔21的内壁面之间形成有间隙。
19.根据该结构,借助构件更换装置的工具相对于第一构件的周向的固定位置的精度提高。
20.另外,本发明例如也是图7a至图11b所示那样的构件更换装置。
21.本发明的构件更换装置具备:第一板1,安装于第一构件8,且具有从外周缘部向轴向延伸的筒状壁部10;第二板2,安装于第二构件5;壳体3,经由所述第二板2安装于所述第二构件5,且直径比所述第一板1的直径小;多个操作销构件4,插入所述壳体3,且在所述第二板2侧具有楔面12c;以及施力部件13,配置在所述壳体3内,且向所述壳体3的径外方向对所述操作销构件4施力。在所述筒状壁部10的轴向的末端部形成有向该筒状壁部10的径内方向突出的卡合部10a,通过所述操作销构件4克服所述施力部件13的作用力而被压入所述壳体3内,所述楔面12c与所述卡合部10a的卡合被解除,能够从所述第一构件8拆卸所述第二构件5。
22.本发明的上述构件更换装置起到如下的作用效果。
23.通过将操作销构件压入壳体内,能够进行第二构件的拆卸,不使用手柄就能够进行第二构件的更换作业。
24.在本发明的上述构件更换装置中,例如,如图11a、11b所示,也可以是,在所述壳体3的中央形成有凸部20,供所述凸部20嵌入的凹部19形成于所述第一板件1的中央,嵌入形成在与所述第一板件1的中央不同的部位的销孔21的定位销22突出设置于所述壳体3。
25.根据该结构,第一板相对于壳体的周向的位置始终相同,其结果是,第二构件借助构件更换装置相对于第一构件的周向的固定位置被确定。
26.另外,在本发明的上述构件更换装置中,也可以是,嵌入所述销孔21的所述定位销22的末端部23形成为以下的形状:在所述第一板1的周向上与所述销孔21的内壁面接触,在所述第一板1的径向上在与所述销孔21的内壁面之间形成有间隙。
27.根据该结构,借助构件更换装置的第二构件相对于第一构件的周向的固定位置的精度提高。
28.另外,在本发明的上述构件更换装置中,也可以构成为,所述操作销构件4具备:楔构件12,形成有所述楔面(12c);操作销16,插入形成于所述楔构件12的筒孔12a;以及环状的弹性构件17,安装于所述操作销16与所述楔构件12之间。
29.根据该结构,能够容易地制作操作销构件。
30.发明效果
31.根据本发明的构件更换装置,不使用手柄就能够进行构件(第二构件)的更换作业。
附图说明
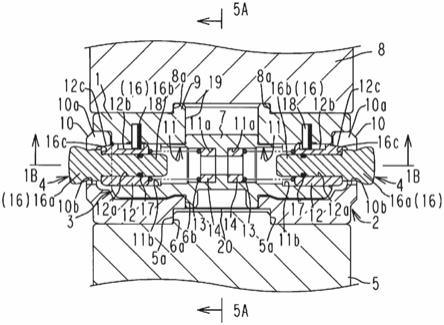
32.图1a表示本发明的第一实施方式,是借助构件更换装置(工具更换装置)将第二构件(工具)安装于第一构件(机器人臂)的状态的沿着轴向的方向的剖视图。
33.图1b是图1a的1b
‑
1b剖视图。
34.图2a是从图1a的状态压入操作销构件的状态的相当于图1a的图。
35.图2b是图2a的2b
‑
2b剖视图。
36.图3a是从图2a的状态卸下第二构件(工具)的状态的相当于图1a的图。
37.图3b是图3a的3b
‑
3b剖视图。
38.图4a是操作销构件从图3a的状态向壳体的径外方向移动了的状态的相当于图1a的图。
39.图4b是图4a的4b
‑
4b剖视图。
40.图5a是图1a的5a
‑
5a剖视图。
41.图5b是图5a的5b
‑
5b剖视图。
42.图6是图4a所示的状态下的构件更换装置(工具更换装置)的立体图。
43.图7a表示本发明的第二实施方式,是借助构件更换装置(工具更换装置)将第二构件(工具)安装于第一构件(机器人臂)的状态的沿着轴向的方向的剖视图。
44.图7b是图7a的7b
‑
7b剖视图。
45.图8a是从图7a的状态压入操作销构件的状态的相当于图7a的图。
46.图8b是图8a的8b
‑
8b剖视图。
47.图9a是从图8a的状态卸下第二构件(工具)的状态的相当于图7a的图。
48.图9b是图9a的9b
‑
9b剖视图。
49.图10a是操作销构件从图9a的状态向壳体的径外方向移动了的状态的相当于图7a的图。
50.图10b是图10a的10b
‑
10b剖视图。
51.图11a是图7a的11a
‑
11a剖视图。
52.图11b是图11a的11b
‑
11b剖视图。
53.图12a是表示构件更换装置(工具更换装置)的变形例的、相当于图7a的图。
54.图12b是图12a的12b
‑
12b剖视图。
55.图13是表示构件更换装置(工具更换装置)的变形例的、相当于图11b的图。
具体实施方式
56.图1a至图6表示本发明的第一实施方式。作为构件更换装置的工具更换装置用于将器具、夹紧件、托盘、夹具等作为第二构件的工具5相对于作为第一构件的机器人臂8进行装卸,例如,如以下那样构成。
57.如图1a等所示,工具更换装置具备作为第一板的连接板1、作为第二板的工具板2、壳体3以及多个操作销构件4。
58.在机器人臂8的末端部的凹部8a嵌入有形成于连接板1的上表面中央的凸部9。在连接板1的中央形成有与上述凸部9同心的筒孔19,在该筒孔19嵌入有设置于壳体3的上表面中央的凸部7,经由连接板1利用螺栓等(未图示)将壳体3安装于机器人臂8。
59.另外,在工具5的基端部的凸部5a嵌合有形成于工具板2的下表面中央的凹部6a,工具板2通过螺栓等(未图示)安装于工具5。该工具板2具有从其外周缘部向轴向延伸的筒状壁部10。
60.壳体3的直径比工具板2的直径小,在其内部形成有收容上述操作销构件4的收容部11。该收容部11是从壳体3的外周面朝向壳体3的中心部延伸的中空部,在壳体3的中心部侧具有小径部11a,在壳体3的外周面侧具有扩宽部11b。在本实施方式中,呈一条直线状地形成有2个收容部11。2个收容部11连通,但也可以不连通。
61.构成操作销构件4的楔构件12配置于上述扩宽部11b,作为向壳体3的径外方向对操作销构件4(楔构件12)施力的施力部件的弹簧13(螺旋弹簧)配置于收容部11内。另外,在上述小径部11a配置有成为弹簧13的承受部的筒状的弹簧座14。上述扩宽部11b的内侧的角部15形成为向外侧凸出的圆弧状的空洞部。
62.操作销构件4具有上述楔构件12和插入形成于楔构件12的筒孔12a的操作销16。通过操作销16的销头部16a与直径比该销头部16a小的销部16b之间的台阶部16c,楔构件12不会从操作销16向销头部16a侧脱落。在上述销部16b与楔构件12之间安装有环状的作为弹性构件的o型圈17。该o型圈17用于防止操作销16从楔构件12的筒孔12a脱落。
63.防脱销18从连接板1的下表面突出。该防脱销18的头部配置在形成于楔构件12的上表面的槽12b内。另外,在楔构件12的上表面(连接板1侧的面)形成有楔面12c,该楔面12c与形成于上述筒状壁部10的轴向的末端部的、向筒状壁部10的径内方向突出的卡合部10a卡合。
64.如图6等所示,在筒状壁部10形成有u字形状的切口部10b,操作销16从壳体3内向其径外方向超过切口部10b而突出。
65.另外,在工具板2的上表面中央形成有与上述凹部6a同心的孔6b(凹部),设置于壳体3的下表面中央的凸部20嵌入该孔6b。
66.如图5a、图5b所示,在与工具板2的中央不同的部位形成有销孔21,嵌入该销孔21的定位销22突出设置于壳体3的下表面。
67.上述定位销22的末端部23形成为如下形状:其周围的4处被开设切口,在工具板2的周向上与上述销孔21的内壁面接触,在工具板2的径向上,在与销孔21的内壁面之间形成有微小的间隙。
68.上述结构的工具更换装置如下那样地进行动作。
69.在图1a、图1b所示的将工具5安装于机器人臂8的锁定状态下,2个操作销构件4通过弹簧13的作用力向壳体3的径外方向移动,各个楔构件12的楔面12c与形成于工具板2的筒状壁部10的末端部的卡合部10a卡合。此时,相对于弹簧13的伸缩方向倾斜的楔面12c将筒状壁部10的上述卡合部10a向连接板1侧按压,因此,安装于工具板2的工具5被向机器人臂8侧拉近,经由工具更换装置牢固地固定于机器人臂8。
70.在从机器人臂8拆卸工具5时,如图2a、图2b所示,用手指等克服弹簧13的作用力将2个操作销构件4压入壳体3内。于是,上述楔面12c与卡合部10a的卡合被解除,楔构件12向
比筒状壁部10的卡合部10a(的内周面)靠内侧的位置移动。由此,能够从机器人臂8拆卸工具5。
71.如图3a、图3b所示,通过在将操作销构件4压入壳体3内的状态下卸下工具5等从机器人臂8卸下工具5。之后,当手指从2个操作销构件4离开时,如图4a、图4b所示,2个操作销构件4通过弹簧13的作用力向壳体3的径外方向移动。
72.在将工具5安装于机器人臂8时,在用手指等克服弹簧13的作用力将2个操作销构件4压入壳体3内的状态下,例如将安装有工具5的工具板2覆盖壳体3。此时,使形成于工具板2的销孔21与从壳体3的下表面突出的定位销22对合。
73.当在定位销22的末端部23嵌合有销孔21,工具板2完全覆盖壳体3时,使手指从2个操作销构件4离开。于是,2个操作销构件4通过弹簧13的作用力向壳体3的径外方向移动,各个楔构件12的楔面12c与形成于工具板2的筒状壁部10的末端部的卡合部10a卡合,成为图1a、图1b所示的锁定状态。
74.由于在定位销22的末端部23嵌合有销孔21,在壳体3的凸部20嵌合有工具板2的孔6b,因此工具板2相对于壳体3在2个部位被定位。因此,容易将工具板2相对于壳体3平行地定位固定。另外,销孔21在工具板2的周向上与定位销22接触而外嵌,由此工具板2相对于壳体3准确地定位于以壳体3的轴心为中心的旋转方向的规定位置。
75.上述工具更换装置起到如下的作用效果。
76.在日本特开2008
‑
272875号公报(专利文献1)所记载的工具更换装置中,工具的更换(装卸)需要手柄。与此相对,根据上述的工具更换装置,不使用手柄就能够进行工具的更换作业。在此,上述工具更换装置具有2个(多个)操作销构件4。在安装有工具的机器人臂进行操作时,即使一方的操作销构件4碰到某些物体而操作销构件4被压入壳体3内,通过未被压入壳体3内的另一方的操作销构件4,也不会使工具5从机器人臂8脱离。即,通过设置多个操作销构件4,能够有效地防止工具5从机器人臂8脱落。
77.另外,从壳体3的下表面突出的定位销22的末端部23形成为如下形状:在工具板2的周向上与该销孔21的内壁面接触,在工具板2的径向上,在与销孔21的内壁面之间形成有微小的间隙。根据该结构,当销孔21嵌合于定位销22的末端部23、或者定位销22的末端部23嵌入销孔21时,定位销22的末端部23在工具板2的周向上必定与该销孔21的内壁面接触,因此借助工具更换装置将工具5固定于机器人臂8的周向上的固定位置的精度提高。
78.图7a至图11b表示本发明的第二实施方式。第二实施方式的工具更换装置如下构成。此外,第一实施方式与第二实施方式的主要区别在于,在第二实施方式中,壳体3以及楔构件12的上下颠倒,不是在作为第二板的工具板2而是在作为第一板的连接板1设置有筒状壁部10。
79.如图7a等所示,工具更换装置具备连接板1、工具板2、壳体3以及多个操作销构件4。
80.在机器人臂8的末端部的凹部8a嵌入有形成于连接板1的上表面中央的凸部9,连接板1通过螺栓等(未图示)安装于机器人臂8。该连接板1具有从其外周缘部向轴向延伸的筒状壁部10。
81.另外,在工具5的基端部的凸部5a嵌合有形成于工具板2的下表面中央的凹部6a。在工具板2的上表面中央形成有与上述凹部6a同心的孔6b,在该孔6b嵌入有设置于壳体3的
下表面中央的凸部7,经由工具板2通过螺栓等(未图示)将壳体3安装于工具5。
82.壳体3的直径比连接板1的直径小,在其内部形成有收容上述操作销构件4的收容部11。该收容部11是从壳体3的外周面朝向壳体3的中心部延伸那样的中空部,在壳体3的中心部侧具有小径部11a,在壳体3的外周面侧具有扩宽部11b。在本实施方式中,呈一条直线状地形成有2个收容部11。2个收容部11连通,但也可以不连通。
83.构成操作销构件4的楔构件12配置于上述扩宽部11b,作为向壳体3的径外方向对操作销构件4(楔构件12)施力的施力部件的弹簧13(螺旋弹簧)配置于收容部11内。另外,在上述小径部11a配置有成为弹簧13的承受部的筒状的弹簧座14。上述扩宽部11b的内侧的角部15形成为向外侧凸出的圆弧状的空洞部。
84.操作销构件4具有上述楔构件12和插入形成于楔构件12的筒孔12a的操作销16。通过操作销16的销头部16a与直径比该销头部16a小的销部16b之间的台阶部16c,楔构件12不会从操作销16向销头部16a侧脱落。在上述销部16b与楔构件12之间安装有环状的作为弹性构件的o型圈17。该o型圈17用于防止操作销16从楔构件12的筒孔12a脱落。
85.防脱销18从工具板2的上表面突出。该防脱销18的头部配置在形成于楔构件12的下表面的槽12b内。另外,在楔构件12的下表面(工具板2侧的面)形成有楔面12c,该楔面12c与形成于上述筒状壁部10的轴向的末端部的、向筒状壁部10的径内方向突出的卡合部10a卡合。
86.在筒状壁部10形成有u字形状的切口部10b,操作销16从壳体3内向其径外方向超过切口部10b而突出。
87.另外,在连接板1的中央形成有作为凹部的筒孔19,设置于壳体3的上表面中央的凸部20嵌入该筒孔19。
88.如图11a、图11b所示,在与连接板1的中央不同的部位形成有销孔21,嵌入该销孔21的定位销22突出设置于壳体3的上表面。
89.上述定位销22的末端部23形成为如下形状:其周围的4处被开设切口,在连接板1的周向上与上述销孔21的内壁面接触,在连接板1的径向上,在与销孔21的内壁面之间形成有微小的间隙。
90.上述结构的工具更换装置如下那样地进行动作。
91.在图7a、图7b所示的将工具5安装于机器人臂8的锁定状态下,2个操作销构件4通过弹簧13的作用力向壳体3的径外方向移动,各个楔构件12的楔面12c与形成于连接板1的筒状壁部10的末端部的卡合部10a卡合。此时,相对于弹簧13的伸缩方向倾斜的楔面12c将筒状壁部10的上述卡合部10a向工具板2侧按压,安装于工具板2的工具5经由工具更换装置牢固地固定于机器人臂8。
92.在从机器人臂8拆卸工具5时,如图8a、图8b所示,用手指等克服弹簧13的作用力将2个操作销构件4压入壳体3内。于是,上述楔面12c与卡合部10a的卡合被解除,楔构件12向比筒状壁部10的卡合部10a(的内周面)靠内侧的位置移动。由此,能够从机器人臂8拆卸工具5。
93.如图9a、图9b所示,通过在将操作销构件4压入壳体3内的状态下卸下工具5等而从机器人臂8卸下工具5。之后,当手指从2个操作销构件4离开时,如图10a、图10b所示,2个操作销构件4通过弹簧13的作用力向壳体3的径外方向移动。
94.在将工具5安装于机器人臂8时,在用手指等克服弹簧13的作用力将2个操作销构件4压入壳体3内的状态下,例如将经由工具板2安装有工具5的壳体3嵌入连接板1的筒状壁部10的内侧。此时,使从壳体3的上表面突出的定位销22与形成于连接板1的销孔21对合。
95.当定位销22的末端部23嵌入销孔21,壳体3嵌入筒状壁部10内时,手指从2个操作销构件4离开。于是,2个操作销构件4通过弹簧13的作用力向壳体3的径外方向移动,各个楔构件12的楔面12c与形成于连接板1的筒状壁部10的末端部的卡合部10a卡合,成为图7a、图7b所示的锁定状态。
96.定位销22的末端部23嵌入销孔21,壳体3的凸部20嵌入连接板1的筒孔19,因此壳体3相对于连接板1在2个部位被定位。因此,容易将壳体3相对于连接板1平行地定位固定。另外,定位销22在连接板1的周向上与销孔21接触并嵌入,由此壳体3相对于连接板1准确地定位于以连接板1的轴心为中心的旋转方向的规定位置。
97.上述的实施方式能够进行如下变更。
98.在上述实施方式中,成为从壳体3内向壳体3的径外方向超过形成于筒状壁部10的切口部10b而突出的操作销构件4。取而代之,如图12a、图12b所示,插入壳体3的操作销构件4的销头部16a也可以不超过上述切口部10b而突出。
99.如图13所示,也可以设置多个定位销22。在该情况下,例如,一方的定位销22a为y方向(连接板1、工具板2的周向)上的定位销,另一方的定位销22b为与上述y方向正交的x方向(连接板1、工具板2的径向)上的定位销。
100.定位销22a的末端部23a形成为在连接板1(在第一实施方式中为工具板2)的周向上与销孔21a的内壁面接触,且在连接板1(在第一实施方式中为工具板2)的径向上在与销孔21a的内壁面之间形成有微小的间隙的形状,定位销22b的末端部23b形成为在连接板1(在第一实施方式中为工具板2)的径向上与销孔21b的内壁面接触,且在连接板1(在第一实施方式中为工具板2)的周向上在与销22b的内壁面之间形成有微小的间隙的形状。
101.如图13所示,也可以省略凸部20。附图标记c表示连接板1的中心。
102.也可以取代将定位销22、22a、22b设置于壳体3并且将销孔21、21a、21b设置于连接板1或者工具板2的情况,而将定位销22、22a、22b设置于连接板1或者工具板2并且将销孔21、21a、21b设置于壳体3。
103.在上述实施方式中,在工具更换装置的周向上,以180度的间隔(相位差)配置有2个操作销构件4。2个操作销构件4在壳体3(工具更换装置)的周向上的配置间隔(相位差)并不限定于180度,也可以以90度、120度等配置间隔(相位差)配置2个操作销构件4。
104.也可以配置3个以上的操作销构件4。
105.操作销构件4也可以不是如楔构件12、操作销16那样由不同的构件构成,而是作为具有楔部的操作销构件而由一个原材料形成的一体成形品。
106.另外,也可以代替使用防脱的o型圈17而将操作销16压入形成于楔构件12的筒孔12a。
107.连接板1、工具板2以及壳体3在俯视观察时均为圆形,但也可以代替设为圆形,而设为四边形等多边形、椭圆形等。
108.只要构成为机器人臂8的凹部8a的轴心与工具5的凸部5a的轴心最终一致即可,凸部7、凸部20也可以不形成于中央。
109.也可以代替器具、夹紧件、托盘、夹具等工具5,而将机械加工的对象物设为作为拆卸的对象的第二构件。另外,也可以代替机器人臂8而将搬送机械的可动部分、作为固定台的工作台设为第一构件。
110.以上,对本发明的实施方式进行了说明。此外,当然能够在本领域技术人员能够想到的范围内进行各种变更。
111.附图标记的说明
112.1:连接板(第一板)、2:工具板(第二板)、3:壳体、4:操作销构件、5:工具(第二构件)、6b:孔(凹部)、8:机器人臂(第一构件)、10:筒状壁部、10a:卡合部、12:楔构件、12a:筒孔、12c:楔面、13:弹簧(施力部件)、16:操作销、17:o型圈(弹性构件)、19:筒孔(凹部)、20:凸部、21:销孔、22:定位销、23:末端部。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1