双门系统的制作方法
1.本发明涉及一种双门系统,包括受击门扇(understriking door leaf)和撞击门扇(overstriking door leaf)。本发明还涉及用于操作该双门系统的方法。
背景技术:
2.防火门装置通常用于公共区域,以便在紧急情况下控制火势和烟雾,并提供安全的逃生通道。常规的防火门装置通常采用摆动门扇。为了提供大的门开口,可以使用双摆动门扇。
3.在现有技术中,防火双扇门装置往往是t形的(rebated)。在这种装置中,摆动门扇中的一个稍微重叠。因此,摆动门扇中的一个有凸缘,其遍布在另一摆动门扇的外侧,以便在摆动门扇处于关闭位置时覆盖它们之间的间隙。
4.由于防火门正确功能的重要性,有法律规定,门扇必须以正确的顺序关闭,以确保在发生火灾时完全关闭的门组。因此,门扇中的一个起主门扇的作用,另一门扇起从门扇的作用。
5.在过去,门关闭的顺序已被手动测试。这是由服务人员关闭门操作器的电源并随后开启门来完成。之后,服务人员让主门扇关闭,并观察它是否停止,以允许从门扇在所述主门扇之前关闭。在从门扇关闭后,观察它是否发出机械信号,主门扇对此作出反应,完成门组的关闭顺序。
6.本发明的发明人已发现,在该领域还有改进的余地。
技术实现要素:
7.根据一个方面,提供了一种双门系统。双门系统包括受击门扇、撞击门扇、适于在开启位置和关闭位置之间移动受击门扇的第一门操作器、适于在开启位置和关闭位置之间移动撞击门扇的第二门操作器、机械制动布置、以及电动协调系统。
8.受击门扇应在撞击门扇之前关闭,以关闭双门。机械制动布置包括布置成制动撞击门扇的移动的制动部件以及机械地操作的第一控制部件。
9.第一控制部件布置成关于受击门扇的位置来控制制动部件的制动。
10.第二门操作器包括第二马达,其布置成在开启位置和关闭位置之间驱动撞击门扇。
11.电动协调系统还包括电动协调控制器,其可操作地连接至第二马达。电动协调控制器构造成控制第二马达,以基于受击门扇的位置制动撞击门扇的移动。电动协调系统是电动操作的。
12.根据一方面,提供了一种用于操作双门系统的方法。
13.本发明的实施例由所附的从属权利要求限定,并在具体实施方式部分以及附图中进一步解释。
14.应该强调的是,在本说明书中使用的术语“包括/包含”被认为是指定存在的特征、
整数、步骤或组件,但不排除存在或增加一个或多个其它特征、整数、步骤、组件、或它们的组合。除非本文另有明确定义,否则权利要求书中使用的所有术语都应根据其所在技术领域的通常含义进行解释。所有对“一/一种/该[元素、设备、组件、手段、步骤等]”的提及应公开解释为指该元素、设备、组件、手段、步骤等的至少一个实例,除非另有明确说明。除非明确说明,本文公开的任何方法的步骤不必按照所公开的确切顺序执行。
[0015]
在本文中提到实体“被设计为”做某事,或“能够”做某事,意图与该实体“被布置成用于”、“构造成用于”或“适于”做这件事相同,并且反之亦然。
附图说明
[0016]
将参照附图更详细地描述本发明,在附图中:
[0017]
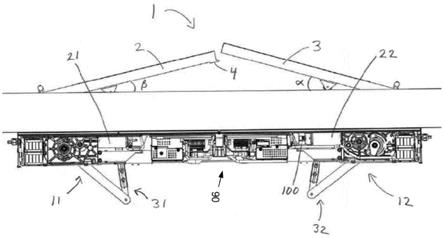
图1为根据本发明的双门系统的实施例的俯视图。
[0018]
图2为根据本发明实施例的电动协调系统的示意图。
[0019]
图3为根据本发明的门操作器系统的实施例的俯视图。
[0020]
图4为根据本发明的第二门操作器的实施例的透视图。
[0021]
图5为图3所示的第二门操作器的实施例的细节的透视图。
[0022]
图6为图3所示的第二门操作器的实施例的另一细节的透视图。
[0023]
图7为根据本发明的第一门操作器的实施例的透视图。
[0024]
图8为根据本发明的机械制动布置的实施例的透视图。
具体实施方式
[0025]
本发明涉及一种双门系统,其包括机械制动布置和电动协调系统,它们两者相互配合以操作撞击门扇和受击门扇。
[0026]
如上所述,本发明涉及一种双门系统1,包括受击门扇2,撞击门扇3,适于在开启位置和关闭位置之间移动受击门扇2的第一门操作器11、适于在开启位置和关闭位置之间移动撞击门扇3的第二门操作器12、以及机械制动布置100。受击门扇2应在撞击门扇2之前关闭,以关闭双门。
[0027]
机械制动功能将参照图1进一步描述。
[0028]
机械制动布置100包括制动部件101,102,其布置成制动撞击门扇3的移动。
[0029]
机械制动布置包括第一控制部件103。第一控制部件是机械地操作的。第一控制部件103布置成关于受击门扇2的位置来控制制动部件101,102的制动。
[0030]
在一个实施例中,机械制动布置还可包括第二控制部件104。第二控制部件104是机械地操作的。第二控制部件104布置成关于撞击门扇3的位置来控制制动部件101,102的制动。
[0031]
第二门操作器12包括第二马达22,其布置成在开启位置和关闭位置之间驱动撞击门扇3。第二马达22可被认为是与第二门操作器12相关的马达,即包含在第二门操作器中。所述马达22布置成在开启位置和关闭位置之间驱动撞击门扇3。
[0032]
因此,第二门操作器12包括布置成在开启位置和关闭位置之间驱动撞击门扇3的马达22。电动协调系统90还包括电动协调控制器91,其可操作地连接至马达22。电动协调控制器91构造成控制马达22,以基于受击门扇2的位置制动撞击门扇3的移动。
[0033]
双门系统还包括电动协调系统90,其在图2中进一步描述。电动协调系统90可布置成控制撞击门扇3的移动。电动协调系统90还包括电动协调控制器91,其可操作地连接至第二马达22。电动协调控制器91构造成控制第二马达22,以基于受击门扇2的位置制动撞击门扇3的移动。电动协调系统90是电动操作的。
[0034]
由此,机械和电子制动系统可以协同或交替运行,以实现门的关闭。这具有许多优点。例如,由于制动系统中的一个能够作为备用制动系统,它提供了一种故障安全制动。另外,在机械和电子制动系统之间的切换减少了门操作器的组件的磨损,从而延长了使用寿命,使双门系统更具成本效益。
[0035]
在一个实施例中,电动协调控制器91可操作地连接至第一传感元件97。第一传感元件97用于监测关于受击门扇3的关闭位置的受击门扇角度(β)。电动协调控制器91构造成控制第二马达22的运行,以基于受击门角度制动撞击门扇2的移动。
[0036]
电动协调控制器(91)可以是可操作地连接至第二传感元件98,以用于监测关于撞击门扇3的关闭位置的撞击门角度,由此,电动协调控制器91构造成控制第二马达21,以基于撞击门角度制动撞击门扇2的移动。
[0037]
进一步参考图1至图2,类似于第二控制部件,电动协调系统90还可布置成控制受击门扇2的移动。
[0038]
因此,在一个实施例中,电动协调控制器91可构造成控制第一门操作器的第一马达。
[0039]
因此,第一门操作器11可包括第一马达21,其布置成在开启位置和关闭位置之间驱动受击门扇2。电动协调控制器91可操作地连接至第一马达21,以控制所述第一马达21的运行。第一马达21可被认为是与第一门操作器11相关的马达,即包含在第一门操作器中的马达。所述马达11布置成在开启位置和关闭位置之间驱动受击门扇2。
[0040]
在一个实施例中,电动协调控制器91可构造成控制第一马达21,以基于撞击门扇3的位置制动受击门扇2的移动。
[0041]
电动协调控制器91还可以可操作地连接至第二传感元件98。第二传感元件98用于监测关于撞击门扇3的关闭位置的撞击门角度。电动协调控制器91可构造成控制第一马达21,以基于撞击门角度制动受击门扇2的移动。
[0042]
为了正确地关闭双门,在撞击门扇移动至其关闭位置之前,受击门扇应该关闭或几乎关闭。这可以通过机械制动布置和/或电动协调系统来完成。
[0043]
如果通过机械制动布置进行制动,第一控制部件基于受击门扇的位置控制制动部件的制动动作且由此也控制撞击门扇的移动。第二控制部件基于撞击门扇的位置控制制动部件,且由此也控制撞击门扇的移动。因此,撞击门扇的移动可以基于受击门扇的位置和撞击门扇的位置这两者。
[0044]
如果通过电动协调系统进行制动,基于受击门扇的位置,通过电动协调控制器控制第二马达,且由此也控制撞击门扇的移动。受击门扇可以由用户手动操作,也可以通过驱动第一门操作器的马达来操作。
[0045]
在手动制动和通过电动协调系统进行电动制动的情况下,撞击门扇不必静止不动并等待直到受击门扇处于其关闭状态;相反,撞击门扇可以提前开始其移动,从而实现双门的快速关闭。双门的快速关闭可改善双门通往的空间内的热或冷的限制。快速关闭也使未
经授权的进入更加困难。此外,快速关闭通过限制烟雾的扩散和限制对火灾的氧气供应来提高消防安全。
[0046]
由于第一控制部件和/或电动协调控制器基于受击门扇的位置控制制动部件的制动动作,且由此也控制撞击门扇的移动,制动部件和/或第二门操作器能保持撞击门扇开启,直到受击门扇关闭或几乎关闭。由于第二控制部件和/或电动协调控制器基于撞击门扇的位置控制制动部件,且由此也控制撞击门扇的移动,只要撞击门扇不妨碍受击门扇的关闭,可允许撞击门扇沿关闭方向移动。机械制动布置和/或电动协调系统布置成协调门扇的关闭,使得受击门扇在撞击门扇关闭之前被关闭。
[0047]
再次参考图1,门扇中的一个可具有肩部4,其与另一门扇重叠。在一个实施例中,受击门扇2设有与撞击门扇3重叠的肩部4。肩部设置在受击门扇面向受击门扇的关闭方向的一侧。在备选的实施例中,撞击门扇设有与受击门扇重叠的肩部(未显示)。肩部设置在撞击门扇面向撞击门扇的开启方向的一侧。包括肩部的双门有时被称为t型门(rebated door)。包括两个门扇的双门有时被称为双扇门(dual door)。
[0048]
机械制动布置是机械地操作的。机械制动布置的正常运行不需要电力供应。因此,机械制动布置可以在没有电源的情况下操作。因而,机械制动布置在无动力状况下是可以操作的。制动部件101,102布置成机械地制动撞击门扇3的移动。第一控制部件103和第二控制部件104是机械地操作的。
[0049]
第一控制部件103布置成关于受击门扇2的位置来机械地控制制动部件101,102的制动,而第二控制部件104布置成关于撞击门扇3的位置来机械控制制动部件101,102的制动。
[0050]
制动部件101,102布置成在无动力状况下制动撞击门扇3的移动。第一控制部件103布置成在无动力状况下,关于受击门扇2的位置来控制制动部件101,102的制动,第二控制部件104布置成在无动力状况下,关于撞击门扇3的位置来机械地控制制动部件101,102的制动。
[0051]
在一个实施例中,第一控制部件103布置成在受击门扇2处于关闭状况时,将制动部件101,102置于非制动状态,并且第二控制部件104布置成在撞击门扇3处于第一开启状态时,将制动部件101,102置于非制动状态,该第一开启状态对应于撞击门扇3关于撞击门扇3的关闭位置具有大于第一预设角度αm的角度(α)的位置。通过在受击门扇处于关闭状况时将制动部件置于非制动状态,允许撞击门扇沿关闭方向移动,在受击门扇处于关闭状况时,撞击门扇可进入其关闭位置。通过在撞击门扇处于第一开启状态时将制动部件置于非制动状态,在撞击门扇开启至一定程度时可允许撞击门扇沿关闭方向移动。因此,在撞击门扇处于其完全开启的位置和撞击门扇关于其完全关闭位置具有第一预设角度αm的位置之间时,允许撞击门扇移动。
[0052]
本文中所使用的受击门扇的关闭状况意指包括受击门扇的完全关闭位置和接近完全关闭位置的位置,例如受击门扇和受击门扇的完全关闭位置之间的第二角度(β)在大约0
°
和大约2
°
之间的位置。
[0053]
在一个实施例中,第一控制部件103,203,303,403和第二控制部件104布置成在受击门扇2处于开启状况且撞击门扇3处于第二开启状态时,将制动部件101,102置于制动状态,该第二开启状态对应于撞击门扇3关于撞击门扇3的关闭位置具有等于或小于所述预设
角度αm的角度(α)的位置。通过在受击门扇处于开启状况且撞击门扇处于第二开启状态时,将制动部件置于制动状态,在撞击门扇处于其关闭位置附近的区域且受击门扇同时处于开启状况时(即处于受击门扇的关闭状况之外的位置时),撞击门扇沿关闭方向的移动被制动。因此,受击门扇的关闭可以不受撞击门扇的阻挡。
[0054]
本文中所使用的受击门扇的开启状况意指包括完全开启位置和除在受击门扇的关闭状况中的位置以外的开启位置,例如受击门扇和受击门扇的完全关闭位置之间的角度(β)在大于约2
°
的位置。
[0055]
在一个实施例中,第一预设角度αm设定为使得在撞击门扇3的角度(α)等于或大于第一预设角度αm时,受击门扇2能够移动至其关闭位置而不干扰撞击门扇3。因此,受击门扇可以从开启位置移动至其关闭位置而不干扰撞击门扇。在撞击门扇的角度大于第一预设角度αm时,即在撞击门扇不干扰受击门扇时,允许撞击门扇沿关闭方向移动。当撞击门扇在受击门扇关闭期间没有干扰受击门扇的风险时,允许撞击门扇沿关闭方向的移动。在撞击门扇的角度等于或小于第一预设角度αm时,即在撞击门扇与受击门扇发生干扰时,撞击门扇沿关闭方向的移动被制动。当撞击门扇在受击门扇关闭期间有干扰受击门扇的风险时,撞击门扇沿关闭方向的移动被制动。第一预设角度αm优选地设定为使得包括与角度α有关的余量,其中受击门扇只能勉强移动到其关闭位置而不干扰撞击门扇。在一个实施例中,第一预设角度αm在8
°
到60
°
的范围之间,例如10
°
到45
°
,例如10
°
到30
°
,例如15
°
到20
°
。
[0056]
在一个实施例中,第一控制部件103是在制动位置和非制动位置之间可移动的,并且第二控制部件104是在制动位置和非制动位置之间可移动的,其中在第一控制部件103和第二控制部件104中的任一个或两个处于它们相应的非制动位置时,制动部件101,102处于非制动状态;并且其中,在第一控制部件103和第二控制部件104两者都处于它们相应的制动位置时,制动部件101,102处于制动状态。由于在第一控制部件处于其非制动位置时,或在第二控制部件处于其非制动位置时,或在第一控制部件处于其非制动位置且第二控制部件处于其非制动位置时,制动部件处于非制动状态,因而在第一控制部件和第二控制部件中的任一个或两个处于它们相应的非制动位置时,允许撞击门扇沿关闭方向移动。由于在第一控制部件处于其制动位置且第二控制部件处于其制动位置时,制动部件处于制动状态,因而在第一控制部件和第二控制部件两者都处于它们相应的制动位置时,撞击门扇沿关闭方向的移动被制动。制动部件的状态且因此制动部件的制动动作取决于第一控制部件和第二控制部件的位置。第一控制部件和第二控制部件中的任一个都可以将制动部件置于非制动状态,但为了使制动部件处于制动状态,第一控制部件和第二控制部件都必须处于它们的制动位置。在一个实施例中,在受击门扇处于如上限定的关闭状况时,第一控制部件处于非制动位置。在一个实施例中,在受击门扇处于如上限定的开启状况时,第一控制部件处于制动位置。在一个实施例中,在撞击门扇处于如上限定的第一开启状态时,第二控制部件处于非制动位置。在一个实施例中,在撞击门扇处于如上限定的第二开启状态时,第二控制部件处于制动位置。
[0057]
上述与机械制动布置相关的第一开启状态和第二开启状态可被认为第一机械开启状态和第二机械开启状态。
[0058]
参考图2,在受击门扇2处于开启状况且撞击门扇3处于第二开启状态时,电动协调系统可布置成将第二门操作器12置于电动制动状态。第二开启状态对应于撞击门扇关于撞
击门扇3的关闭位置具有等于或小于第二预设角度αe的角度(α)的位置。因此,电动协调控制器91构造成指示第二门操作器12的第二马达22响应具有所述角度的撞击门扇提供制动扭矩。因此,第二门操作器被置于电动制动状态,以用于制动撞击门扇3的移动。
[0059]
因此,电动协调系统(即电动协调控制器91)布置成在受击门扇2处于关闭状况时,将第二门操作器12置于非制动状态。此外,电动协调系统布置成在撞击门扇3处于第一开启状态时,将第二门操作器12置于非制动状态,第一开启状态对应于撞击门扇3关于撞击门扇3的关闭位置具有大于预设角度αe的角度(α)的位置。因此,电动协调控制器91构造成指示第二马达21不提供任何制动扭矩。因此,第二门操作器被置于电动非制动状态,以允许撞击门扇3的移动。
[0060]
上述与电动协调系统相关的第一开启状态和第二开启状态可被认为第一电动开启状态和第二电动开启状态。
[0061]
在一个实施例中,第二预设角度αe大于第一预设角度αm。因此,在机械制动布置布置成将制动部件置于机械制动状态之前,通过电动协调系统对撞击门扇3进行制动。这允许双门系统主要通过电动协调系统进行制动,只利用机械制动布置作为辅助制动手段,其在无动力状态下或电动协调系统发生故障时启动。这是特别有利的,因为与电动协调系统相比,机械制动布置更容易受到磨损。
[0062]
与机械制动布置类似,通过在受击门扇处于关闭状况时将第二门操作器12置于非制动状态,允许撞击门扇沿关闭方向移动,并且在受击门扇处于关闭状况时,撞击门扇可进入其关闭位置。通过在撞击门扇处于第一开启状态时将第二门操作器12置于非制动状态,在撞击门扇开启至一定程度时可允许撞击门扇沿关闭方向移动。因此,在撞击门扇处于其完全开启的位置和撞击门扇关于其完全关闭位置具有第二预设角度αe的位置之间时,允许撞击门扇移动。
[0063]
本文中所使用的受击门扇的关闭状况意指包括受击门扇的完全关闭位置和接近完全关闭位置的位置,例如受击门扇和受击门扇的完全关闭位置之间的第二角度(β)在大约0
°
和大约2
°
之间的位置。
[0064]
在一个实施例中,电动协调系统90布置成在受击门扇2处于开启状态且撞击门扇3处于第二打开状态时,将第二门操作器12置于制动状态,第二开启状态对应于撞击门扇3关于撞击门扇3的关闭位置具有等于或小于所述第二预设角度αe的角度(α)的位置。通过在受击门扇处于开启状态且撞击门扇处于第二开启状态时,将第二门操作器12置于制动状态,在撞击门扇处于其关闭位置附近的区域且受击门扇同时处于开启状况时(即处于受击门扇的关闭状况之外的位置时),撞击门扇沿关闭方向的移动被制动。因此,受击门扇的关闭可以不受撞击门扇的阻挡。
[0065]
本文中所使用的受击门扇的开启状况意指包括完全开启位置和除包括在受击门扇的关闭状况中的那些位置以外的开启位置,例如受击门扇和受击门扇的完全关闭位置之间的角度(β)在大于约2
°
的位置。
[0066]
在一个实施例中,第一预设角度αm设定为使得在撞击门扇3的角度(α)等于或大于第二预设角度αe时,受击门扇2能够移动至其关闭位置而不干扰撞击门扇3。因此,受击门扇可以从开启位置移动至其关闭位置而不干扰撞击门扇。在撞击门扇的角度大于第二预设角度αe时(即在撞击门扇不干扰受击门扇时),允许撞击门扇沿关闭方向移动。当撞击门扇在
受击门扇关闭期间没有干扰受击门扇的风险时,允许撞击门扇沿关闭方向的移动。在撞击门扇的角度等于或小于第二预设角度αe时(即在撞击门扇与受击门扇发生干扰时),撞击门扇沿关闭方向的移动被制动。当撞击门扇在受击门扇关闭期间有干扰受击门扇的风险时,撞击门扇沿关闭方向的移动被制动。第二预设角度αe优选地设定为使得包括与角度α有关的余量,其中受击门扇只能勉强移动到其关闭位置而不干扰撞击门扇。在一个实施例中,第二预设角度αe在8
°
到60
°
的范围之间,例如10
°
到45
°
,例如10
°
到30
°
,例如15
°
到20
°
。
[0067]
进一步参考图2,电动协调系统90可构造成用于执行第一门操作器和第二门操作器的不同功能。这些功能中的一个或多个可能涉及到受击门扇和撞击门扇的开启。因此,电动协调系统91可具有连接至第一马达11和第二马达12的控制输出,以用于控制所述第一马达和第二马达的驱动。
[0068]
电动协调控制器91可以用任何已知的控制器技术实施,包括但不限于微控制器、处理器(例如plc、cpu、dsp)、fpga、asic或能够执行预定功能的任何其它合适的数字和/或模拟电路。
[0069]
电动协调控制器91具有相关的存储器。存储器可以用任何已知的存储器技术实施,包括但不限于e(e)prom、s(d)ram或闪存。在一些实施例中,存储器可以与电动协调控制器91集成或在其内部。存储器可存储由电力协调控制器31执行的程序指令,以及由电力协调控制器91使用的临时和永久数据。
[0070]
在一个实施例中,第二预设角度αe可存储在所述相关的存储器中。
[0071]
在一个实施例中,第一传感元件97和/或第二传感元件98可以是分别与第一马达22和第二马达21相关的编码器或旋转计数器。
[0072]
在一个实施例中,第一传感元件97和/或第二传感元件98是门扇角度传感器。门扇角度传感器可至少包括加速度计和陀螺仪中的一种。在一个实施例中,第一门扇角度传感器可安装在受击门扇或机械制动布置的第一移动部。在一个实施例中,第二门扇角度传感器可安装在撞击门扇。
[0073]
在一个实施例中,第一传感元件97连接至电动协调控制器91的输入。电动协调控制器91可构造成使用第一传感元件97的一个或多个读数,通常是第一马达的马达轴旋转时产生的脉冲数,以用于确定受击门扇2的当前的角度位置,例如,受击门扇角度(β)。
[0074]
在一个实施例中,第二传感元件98连接至电动协调控制器91的输入。电动协调控制器91可构造成使用第二传感元件98的一个或多个读数,通常是第二马达的马达轴旋转时产生的脉冲数,以用于确定撞击门扇2的当前的角度位置,例如,撞击门扇角度(α)。
[0075]
电动协调控制器91可构造成指示第二马达22提供制动扭矩,以用于制动撞击门扇3关于受击门扇2的位置的移动。用于制动撞击门扇3的移动所需的制动扭矩可基于撞击门扇3的惯性(其为恒定值)、第二门操作器12(例如马达和齿轮箱)的内部摩擦力、以及由第二移动部32提供的摩擦力,第二移动部32将扭矩从第二马达22传递至撞击门扇,后面将详细描述。
[0076]
类似地,在一实施例中,第一门操作器的第一马达11布置成通过电动协调控制器91进行制动,电动协调控制器91可构造成指示第一马达22提供制动扭矩,以用于制动受击门扇2的移动。这可能与撞击门扇3的位置有关。制动受击门扇2的移动所需的制动扭矩可基于受击门扇2的惯性(其为恒定值)、门操作器11的内部摩擦力(例如马达和齿轮箱)、以及由
第一移动部31提供的摩擦力,第一移动部31将扭矩从第一马达21传递至撞击门扇,后面将详细描述。
[0077]
在一个实施例中,电动协调系统90是在学习模式和操作模式中可操作的。
[0078]
在学习模式60中,电动协调系统90的电动协调控制器91构造成建立控制输入数据所需的信息,随后供电动协调控制器91在正常操作期间使用,换言之,第一马达和/或第二马达制动相关门扇所需的扭矩。所建立的信息可包括受击门扇和/或撞击门扇的惯性62(其为恒定值),第一门操作器和/或第二门操作器的内部摩擦力(与门扇角度成线性关系),以及在第一移动部31和/或第二移动部32处于强制关闭布置的形式时的弹性力64(与门扇角度成线性关系)。如果第一移动部31和/或第二移动部32是连杆臂的形式,连杆臂的摩擦力可包含在所建立的信息中。
[0079]
除了上述之外,在学习模式中,电动协调系统90的电动协调控制器91构造成,对于撞击门扇和/或受击门扇在关闭位置和开启位置之间的移动,通过确定第一马达和/或第二马达在不同的门扇角度(α,β)下引起撞击门扇和/或受击门扇的移动所需的扭矩,自动建立减速曲线。不同的门扇角度是由第一传感元件97和/或第二传感元件98的测量读数确定的。
[0080]
在一个实施例中,扭矩可通过在撞击门扇和/或受击门扇的移动一定角度量(即撞击门扇角度和/或受击门扇角度增加一定角度量m)期间,计算第一传感元件和/或第二传感元件报告的脉冲数来确定。一定角度量m例如可以是1
°
,或大于或小于1
°
,取决于要建立的减速曲线65的预期角度分辨率。
[0081]
在一个实施例中,第一马达21可以是电动伺服马达。在一个实施例中,第二马达22可以是电动伺服马达。
[0082]
第一门操作器和第二门操作器可布置成沿开启方向推动门扇(如图1至图6所示)或沿开启方向拉动门扇。
[0083]
参考图1和图2至图8,在一个实施例中,第二门操作器12包括第二移动部14,其关于撞击门扇3的位置移动,并且第二控制部件104联接至第二移动部14,使得第二移动部14在制动位置和非制动位置之间移动第二控制部件104。因此,对撞击门扇移动的控制是基于第二移动部的移动。第二移动部的移动又取决于撞击门扇的位置。
[0084]
在一个实施例中,第二移动部14是第二弹簧布置14。第二移动部也可以是第二门操作器支臂(类似于图1中的32)或第二门操作器的关于撞击门扇的位置移动的任何其它部分。在一个实施例中,第二移动部是第二弹簧布置14的第二弹簧杆16,如图2、图4和图5所示。在一个实施例中,在撞击门扇3开启时,第二弹簧杆16压缩第二弹簧18。存储在被压缩的第二弹簧18中的弹簧载荷可沿关闭方向移动撞击门扇3。
[0085]
在一个实施例中,第一门操作器11包括第一移动部13,其关于受击门扇2的位置移动,并且第一控制部件103联接至第一移动部13,使得第一移动部13在制动位置和非制动位置之间移动第一控制部件103。因此,对受击门扇移动的控制是基于第一移动部的移动。第一移动部的移动又取决于受击门扇的位置。
[0086]
在一个实施例中,第一移动部13是第一弹簧布置13。第一移动部也可以是第一门操作器支臂(类似于图1中的31)或第一门操作器的关于受击门扇的位置移动的任何其它部分。在一个实施例中,第一移动部13是第一弹簧布置13的第一弹簧杆15,如图7所示。在一个实施例中,在受击门扇2开启时,第一弹簧杆15压缩第一弹簧17。存储在被压缩的第一弹簧
17中的弹簧载荷可沿关闭方向移动受击门扇2。
[0087]
在一个实施例中,第一控制部件103,203,303,403通过第一位置转移杆19联接至第一移动部13。
[0088]
在图7所示的实施例中,第一弹簧杆15通过第一连接器24连接至第一位置转移杆19。
[0089]
在图4至图6和图8所示的实施例中,第一位置转移杆19通过第一支臂25连接至第一控制部件103,第二弹簧杆16通过第二连接器26连接至第二控制部件104。
[0090]
在一个实施例中,制动部件101,102具有被动位置和主动位置,其中制动部件101,102在被动位置处于其制动状态,制动部件101,102在主动位置处于其非制动状态。因此,制动部件在其被动位置施加制动动作。被动位置对应于制动部件的静止状态。在制动部件不受制动控制部件(诸如第一控制部件和第二控制部件)的影响时,制动部件可处于其被动位置。在制动部件受到制动控制部件(诸如第一控制部件和第二控制部件中的任一个或两个)的影响时,制动部件可处于其主动位置。在一个实施例中,在制动部件变得不受制动控制部件的影响时,制动部件可自动进入其被动位置。在一个实施例中,在制动部件受到制动控制部件的影响并变得不受制动控制部件的影响时,制动部件可自动从其主动位置回到其被动位置。
[0091]
在一个实施例中,制动部件101,102的被动位置通过制动弹簧105获取。在制动部件不受影响时,制动弹簧可迫使制动部件进入制动部件的制动状态。在制动部件变得不受制动控制部件的影响时,制动弹簧也可使制动部件进入制动状态。
[0092]
在一个实施例中,制动部件101,102在被动位置不受第一控制部件103和第二控制部件104的影响。在一个实施例中,制动部件101,102在主动位置受到第一控制部件103和/或第二控制部件104的影响。
[0093]
在一个实施例中,第一控制部件103和第二控制部件104布置成机械地将制动部件101,102从其被动位置移动至其主动位置。因此,第一控制部件103和第二控制部件机械地控制制动手段的位置。因此,第一控制部件和第二控制部件布置成将制动部件置于非制动状态。第一控制部件和第二控制部件布置成将制动部件从制动状态移动到非制动状态。
[0094]
在一个实施例中,第一控制部件103布置成在受击门扇2进入如上限定的关闭状况时,将制动部件101,102移动至主动位置。在一个实施例中,第二控制部件104布置成在撞击门扇3进入如上限定的第一开启状态时,将制动部件101,102移动至主动位置。在一个实施例中,第一控制部件103布置成在受击门扇2被移动到如上限定的关闭状况时,将制动部件101,102从被动位置移动到主动位置。在一个实施例中,第二控制部件104布置成在撞击门扇3被移动到第一开启状态时,将制动部件101,102从被动位置移动到主动位置。
[0095]
在一个实施例中,第一控制部件103和第二控制部件104还布置成机械地将制动部件101,102从其主动位置移动到其被动位置。因此,第一控制部件和第二控制部件还机械地控制制动部件的位置。因此,第一控制部件和第二控制部件布置成将制动部件置于制动状态。第一控制部件和第二控制部件布置成将制动部件从非制动状态移动到制动状态。
[0096]
在一个实施例中,第二控制部件104布置成在受击门扇2处于如上限定的开启状况且撞击门扇3进入如上限定的第二开启状态时,在撞击门扇3处于第二开启状态且受击门扇2进入开启状况时,或在受击门扇2进入开启状况且撞击门扇3基本同时进入第二开启状态
时,将制动部件101,102移动到被动位置。在一个实施例中,第二控制部件104布置成在受击门扇2处于如上限定的开启状况且撞击门扇3移动到如上限定的第二开启状态时,在撞击门扇3处于第二开启状态且受击门扇2移动到开启状况时,或者在受击门扇2移动到开启状况且撞击门扇3基本同时移动到第二开启状态时,将制动部件101,102从主动位置移动到被动位置。
[0097]
在一个实施例中,机械制动布置100布置成制动第二门操作器12的第二马达22的第二马达轴的旋转。在一个实施例中,第二门操作器12包括具有马达轴的第二马达22。第二门操作器12的第二马达22可布置成开启撞击门扇3。因此,机械制动布置100可布置成制动第二门操作器12的马达22的马达轴的旋转,马达22布置成开启撞击门扇3。制动鼓107可连接至第二马达22的马达轴。第二马达可以是电动机。
[0098]
在一个实施例中,第一门操作器11包括第一马达21。第一门操作器11的第一马达21可布置成开启受击门扇2。第一马达可以是电动机。
[0099]
在一个实施例中,机械制动布置100布置成仅影响撞击门扇3沿撞击门扇3的关闭方向的移动。
[0100]
在一个实施例中,机械制动布置包括制动鼓107。机械制动布置的制动动作是通过制动部件101,102对制动鼓的动作来实现的。因此,制动部件101,102作用于制动鼓107。在制动状态下,制动部件101,102抵接制动鼓107。在非制动状态下,制动部件101,102与制动鼓107分离。在一个实施例中,制动鼓107安装在第二马达22的第二马达轴上。在一个实施例中,单向离合器105布置在制动鼓107,207,407和第二马达22的第二马达轴之间。
[0101]
在一个实施例中,机械制动布置100包括制动弹簧105,其将制动部件101,102推向制动鼓107。
[0102]
在一个实施例中,第一控制部件103布置成将制动部件101,102与制动鼓107分离。第一控制部件103布置成在第一控制部件103的非制动位置将制动部件101,102与制动鼓107分离。在一个实施例中,第一控制部件103布置成在第一控制部件103的制动位置不影响制动部件101,102。
[0103]
在一个实施例中,第二控制部件104布置成将制动部件101,102与制动鼓107分离。第二控制部件104布置成在第二控制部件104的非制动位置将制动部件101,102与制动鼓107分离。在一个实施例中,第二控制部件104布置成在第二控制部件104的制动位置不影响制动部件101,102。
[0104]
在制动部件101,102的非制动状态下,第一控制部件103或第二控制部件104将制动部件101,102与制动鼓107分离。
[0105]
在一个实施例中,机械制动布置100包括两个制动部件101,102。在一个实施例中,第一控制部件103布置成控制所述两个制动部件101,102两者的制动。在一个实施例中,第二控制部件104布置成控制所述两个制动部件101,102两者的制动。
[0106]
在图8所示的实施例中,在第一控制部件103的非制动位置,第一控制部件103布置在两个制动部件102(另一个未显示)的自由端之间。因此,第一控制部件103将两个制动部件102(另一个未显示)与鼓107分离。在第二控制部件104的非制动位置,第二控制部件104布置在两个制动部件102(另一个未显示)的自由端之间。因此,第二控制部件104将两个制动部件102(另一个未显示)与鼓107分离。制动部件101,102作用于鼓107的外侧。制动弹簧
105是拉伸弹簧,将两个制动部件101,102径向向内推。
[0107]
下面对本发明的操作进行解释。
[0108]
双门的操作解释如下。
[0109]
在受击门扇2和撞击门扇3都完全打开时,受击门扇2处于其开启状况,撞击门扇3处于其第一开启状态,即角度α大于为机械制动布置或电动协调系统设定的预设值。
[0110]
然后第一控制部件103处于其制动位置,第二控制部件104处于其非制动位置。制动部件101处于其非制动状态(由于控制部件中的至少一个处于其非制动位置,且由此制动部件与鼓分离)。因此,允许撞击门扇3沿关闭方向移动。只要撞击门扇处于其第一开启状态,就不会有撞击门扇妨碍受击门扇关闭的风险。
[0111]
在撞击门扇3被移动到其第二开启状态的情况下,即撞击门扇3被移动到角度α等于为机械制动布置或电动协调系统设定的预设角度的位置,此时受击门扇2仍然处于其打开状况,那么,如果机械制动布置被激活,第一控制部件103仍然处于其制动位置,第二控制部件104被移动到其制动位置。这时,制动部件101,102处于其制动状态(由于控制部件两者都在其制动位置,制动部件因此抵接鼓)。如果电动协调系统被激活,在撞击门扇3处于由第二预设角度αe设定的第二开启状态时,电动协调控制器91指示第二马达22对撞击门扇3的移动进行制动。因此,电动协调控制器可构造成促使第二马达反向运行,例如,从用于沿关闭方向驱动门的驱动方向到用于制动门的制动方向。
[0112]
因此,撞击门扇3的移动在关闭方向上被制动。撞击门扇3将被保持在等于预设角度的角度α,直到受击门扇2达到其关闭状况,以避免撞击门扇3阻碍受击门扇2的关闭移动。
[0113]
在受击门扇2被移动到其关闭状况时,第一控制部件103移动到其非制动位置。撞击门扇3仍处于其第二开启状态,即撞击门扇3处于角度α等于机械制动布置或电动协调系统设定的预设角度的位置。
[0114]
如果通过机械制动布置对撞击门扇3进行制动,那么第一控制部件103处于其非制动位置,第二控制部件104仍处于其制动位置。这时,制动部件101处于其非制动状态(由于控制部件中的至少一个处于其非制动位置,制动部件因此与鼓分离)。因此,允许撞击门扇3沿关闭方向移动。因此,双门被正确关闭。
[0115]
如果通过电动协调系统对撞击门扇3进行制动,那么电动协调系统90将响应于受击门扇达到其关闭位置,使第二门操作器置于非制动状态。因此,电动协调控制器91将指示第二马达22不提供任何制动扭矩,并允许撞击门扇的移动。此外,电动协调控制器91可以指示第二马达22驱动撞击门扇3向其关闭位置移动。随后,机械制动布置将不会被激活,而门将关闭。
[0116]
如果在撞击门扇仍然处于其第一开启状态(即角度α大于由机械制动布置或电动协调系统设定的预设值)时,受击门扇2反而达到其关闭状态,那么,如果机械制动布置被激活,第一控制部件103移动至其非制动位置,而第二控制部件104仍然处于其非制动位置。这时,制动部件101,102处于其非制动状态(由于控制部件中的至少一个(此时为两个)都处于其非制动位置,制动部件因此与鼓分离)。因此,允许撞击门扇3沿关闭方向移动。
[0117]
如果电动协调系统被激活,电动协调控制器91指示第二门操作器12处于非制动状态,从而允许撞击门扇3沿关闭方向移动。因此,电动协调控制器91指示第二马达22不提供任何制动扭矩。电动协调控制器可构造成如果受击门扇2处于关闭状况,并且撞击门角度大
于第二预设角度αe,促使第二马达22沿关闭方向驱动撞击门扇3。
[0118]
在撞击门扇3移动至其第二开启状态时,即撞击门扇3被移动至角度α等于或小于由机械制动布置或电动协调系统设定的预设角度的位置,如果机械制动布置被激活,第二控制部件104移动至其制动位置。受击门扇2仍然处于其关闭状况,而第一控制部件103仍然处于其非制动位置。然后,制动部件101,102处于其非制动状态(由于控制部件中的至少一个处于其非制动位置,因此制动部件与鼓分离)。因此,允许撞击门扇3沿关闭方向移动。因此,双门被正确关闭。
[0119]
基于受击门扇的位置,第一控制部件的移动解释如下。
[0120]
在受击门扇2例如通过第一马达21和第一门操作器支臂31或通过手动方式开启时,即移动至其开启状况,第一弹簧杆15沿第二门操作器12的相反方向移动。通过第一弹簧杆15的移动,第一弹簧杆15的第一端15a压缩第一弹簧17。通过第一弹簧杆15的移动,连接至第一弹簧杆15的第一位置转移杆19沿与第一弹簧杆15相同的方向移动。因此,连接至第一位置转移杆19的第一控制部件103沿与第一位置转移杆19相同的方向移动,并进入其制动位置,其中第一控制部件103不影响制动部件101,102。
[0121]
在受击门扇2例如通过在压缩第一弹簧17期间存储在第一弹簧17中的弹簧载荷关闭时,即移动至其关闭状况,第一弹簧杆15在第二门操作器12的方向上移动。因此,连接至第一弹簧杆15的第一位置转移杆19也沿相同的方向移动。由此,连接至第一位置转移杆19的第一控制部件沿相同的方向上移动并进入其非制动位置,其中第一控制部件103将制动部件101,102与制动鼓107分离。
[0122]
基于撞击门扇的位置,第二控制部件的移动解释如下。
[0123]
在撞击门扇3移动至其第一开启状态时,即移动至角度α大于预设角度的位置,例如通过第二马达22和第二门操作器支臂32或通过手动方式,第二弹簧杆16在第一门操作器11的相反方向上移动。通过第二弹簧杆16的移动,第二弹簧杆16的第一端16a压缩第二弹簧18。通过第二弹簧杆16的移动,与第二弹簧杆16连接的第二控制部件与第二弹簧杆16在同一方向上移动,并第二控制部件进入其非制动位置,其中第二控制部件104将制动部件101,102与制动鼓107分离。
[0124]
在撞击门扇3例如通过在压缩第二弹簧18期间存储在第二弹簧18中的弹簧载荷移动至其第二开启状态时,即移动至角度α等于或小于预定角度的位置,第二弹簧杆16沿第一门操作器11的方向移动。因此,连接至第二弹簧杆16的第二控制部件沿与第二弹簧杆16相同的方向移动,并进入其制动位置,其中第二控制部件104不影响制动部件101,102。
[0125]
在一个实施例中,电动协调系统90构造成在服务检查模式下运行。在服务检查模式中,受击门扇和撞击门扇的制动可以完全通过机械制动布置提供。
[0126]
在服务检查模式中,电动协调控制器91构造成指示第一马达21和第二马达22驱动受击门扇2至其开启状况(例如至其处于开启状况的位置),以及驱动撞击门扇3至其第一开启状态。撞击门扇3的第一开启状态对应于撞击门扇3具有大于第一预设角度αm的角度α的位置。电动协调控制器91响应于分别处于开启状况和第一开启状态的受击门扇2和撞击门扇3,构造成驱动第二门操作器12沿关闭方向移动撞击门扇。通过来自第一传感元件97和第二传感元件98的传感器数据确定开启状况和第一开启状态。一旦达到第一预设角度αm,如果机械制动布置正常,机械制动布置构造成制动撞击门扇。
[0127]
这允许服务人员可通过观察机械制动布置是否在第一预设角度αm处制动撞击门扇来检查机械制动布置是否正常。通常情况下,这必须通过切断门操作器的电源和手动操作门来完成。在服务检查模式下,这可以在无人工干预的情况下进行,从而对机械制动布置的功能进行更友好和更具成本效益的测试。
[0128]
因此,电动协调系统90可构造成响应于第一控制部件103和第二控制部件104在受击门扇2处于开启状况且撞击门扇3处于第二开启状态时未将制动部件101,102置于机械制动状态,生成服务报警信号,其中第二开启状态对应于撞击门扇3关于撞击门扇3的关闭位置具有等于或小于第一预设角度αm的角度α的位置。
[0129]
电动协调控制器91可构造成在指示第二门操作器12沿关闭方向移动撞击门扇3之后,响应来自第二传感元件98的表示撞击门扇是静止的传感器数据,获取撞击门扇3的角度(α),并将所述角度(α)与第一预设角度αm进行比较,如果撞击门扇3的第一角度(α)超出所述第一预设角度αm周围的预设阈值,产生服务警报。这允许服务人员能够远程获得有关机械制动布置是否发生故障或未正确校准的输入。例如,电气协调系统可以远程接收指令,以切换到其服务检查模式。如果机械制动布置未在正确的位置(第一预设角度αm)接合撞击门扇,将产生警报。服务报警也可以远程识别。
[0130]
上述的服务报警可认为是第一服务报警。
[0131]
电动协调控制器91可构造成在指示第二门操作器12沿关闭方向移动撞击门扇之后,响应来自第二传感元件98的表示撞击门扇3是静止的传感器数据,指示第一马达21驱动第一门操作器11,以沿关闭方向移动受击门扇2。
[0132]
因此,在通过机械制动布置停止撞击门扇,或者如果机械制动布置发生故障,撞击门扇达到其关闭位置时,受击门扇2被指示向其关闭位置移动。
[0133]
电气协调控制器91可在指示第一马达21驱动第一门操作器11沿关闭方向移动受击门扇2之后,构造成响应来自第一传感元件97和第二传感元件98的表示撞击门扇3和受击门扇2是静止的传感器数据,获取撞击门扇3的角度(α)和受击门扇2的角度(β)。如果所述角度(α)超出与所述撞击门扇的关闭位置相关的关闭位置区间,和/或所述角度(β)超出与所述受击门扇2的关闭位置相关的关闭位置区间,电动协调控制器91构造成生成服务警报。
[0134]
因此,服务人员可以能够远程自动地检测机械制动布置是否允许受击门扇移动经过撞击门扇以及随后关闭撞击门扇以完成关闭循环。
[0135]
上述的服务警报可被视为第二服务警报。在一个实施例中,第一服务警报可以与第二服务警报区分开来,从而使服务人员有可能确定机械制动布置的哪些部件需要维护或更换。
[0136]
电动协调控制器91可包括计时器,据此,上述表示静止门扇的传感器数据可通过电动协调控制器91在预定的时间段内未接收指示门扇的位置变化的传感器数据来识别。
[0137]
在一个实施例中,电动协调系统90构造成响应于接收服务检查命令而切换到服务检查模式。因此,所述电动协调系统90可以可操作性地连接到用户接口,该用户接口构造成生成所述命令并将所述命令发送到电动协调系统的接收接口。所述接收接口可操作性地连接到电动协调控制器91。用户接口可以是位于双门系统附近或门操作器中的一个上的开关形式。用户接口可以是安装有双门系统的建筑物的中央控制系统的形式。
[0138]
在一个实施例中,电动协调系统在非活动模式下运行时,构造成监测与撞击门扇3
的关闭位置有关的角度(α)和受击门扇2的角度(β)。这可以通过电动协调控制器91来执行。
[0139]
电动协调系统90可构造成响应第一控制部件103和第二控制部件104在受击门扇2处于开启状况且撞击门扇3处于第二开启状态时未将制动部件101,102置于机械制动状态而产生服务警报信号,第二开启状态对应于撞击门扇3关于撞击门扇3的关闭位置具有等于或小于第一预设角度αm的角度(α)的位置。
[0140]
根据一方面,提供一种操作上述双门系统的方法。方法描述如下。
[0141]
该方法包括控制第二马达22,以基于受击门扇2的位置制动撞击门扇3的移动。
[0142]
该方法还可包括:第一控制部件103和第二控制部件104在受击门扇2处于开启状况且撞击门扇3处于第二开启状态时,将制动部件101,102置于机械制动状态,第二开启状态对应于撞击门扇3关于撞击门扇3的关闭位置具有等于或小于第一预设角度(αm)的角度(α)的位置。
[0143]
该方法还可包括:在受击门扇2处于开启状况且撞击门扇3处于第二开启状态时,电动协调系统90将第二门操作器12置于电动制动状态,第二开启状态对应于撞击门扇3关于撞击门扇3的关闭位置具有等于或小于第二预设角度(αe)的角度(α)的位置。如前所述,第二预设角度(αe)大于第一预设角度(αm)。
[0144]
该方法还可包括:在受击门扇2处于关闭状况时,电动协调系统90将第二门操作器12置于非制动状态,在撞击门扇3处于第一开启状态时,电动协调系统90布置成将第二门操作器12置于非制动状态,第一开启状态对应于撞击门扇3关于撞击门扇3的关闭位置具有大于第二预设角度(αe)的角度(α)的位置。
[0145]
该方法还可包括:切换至电动协调系统90的服务检查模式,并且,在所述服务检查模式中,指示第一马达21和第二马达22驱动受击门扇2至其开启状况,驱动撞击门扇2至其第一开启状态,所述第一开启状态对应于撞击门扇3关于撞击门扇3的关闭位置具有大于第一预设角度(αm)的角度(α)的位置,并且响应于分别处于开启状况和第一开启状态的受击门扇2和撞击门扇3,指示第二马达22驱动第二门操作器12,以沿关闭方向移动撞击门扇。
[0146]
该方法还可包括:在服务检查模式中,在指示第二门操作器12沿关闭方向移动撞击门扇3之后,响应来自第二传感元件98的表示撞击门扇3是静止的传感器数据,获取撞击门扇3的角度(α),并将所述角度(α)与第一预设角度(αm)进行比较,如果撞击门扇(3)的角度(α)超出所述第一预设角度(αm)周围的预设阈值,生成服务警报。
[0147]
该方法还可包括:在服务检查模式中,在指示第二门操作器12沿关闭方向移动撞击门扇之后,响应来自第二传感元件98的表示撞击门扇3是静止的传感器数据,指示第一马达21驱动第一门操作器11,以沿关闭方向移动受击门扇2。
[0148]
该方法还可包括:在服务检查模式中,在指示第一马达21驱动第一门操作器11沿关闭方向移动受击门扇2之后,响应来自第一传感元件97和第二传感元件98的表示撞击门扇3和受击门扇2是静止的传感器数据,获取撞击门扇3的角度(α)和受击门扇2的角度(β),如果所述角度(α)超出与所述撞击门扇3的关闭位置相关的关闭位置区间,和/或所述角度(β)超出与所述受击门扇2的关闭位置相关的关闭位置区间,生成服务警报。
[0149]
上面已经参考本发明的实施例对本发明进行了详细描述。然而,如本领域技术人员容易理解的,在本发明的范围内,如所附权利要求书所限定的,其它实施例也同样可实施。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1