转矩推定系统、转矩推定方法及储存有程序的计算机可读介质与流程
1.本发明涉及推定摩擦转矩的转矩推定系统、转矩推定方法及程序。
背景技术:
2.已知有使用摩擦转矩的推定模型来推定摩擦转矩的转矩推定系统(例如参照日本特开2008
‑
210273号公报)。
技术实现要素:
3.由于上述转矩推定系统不具备限制值设定单元,所以可能输出预想不到的摩擦转矩的推定值。例如,在使用该摩擦转矩的推定值进行了机器人的灵活控制的情况下,机器人的动作变得不稳定。相对于此,仅仅通过进行各指令值的限制等,存在因机器人的动作停止等而作业效率降低的担忧。
4.本发明是为了解决这样的问题而做出的,主要目的在于,提供一种能够在使机器人等的动作稳定化的同时抑制作业效率降低的转矩推定系统、转矩推定方法及程序。
5.用于达成上述目的的本发明的一方案是一种转矩推定系统,推定旋转机构的摩擦转矩,其中,该转矩推定系统具备:
6.角速度检测单元,检测所述旋转机构的角速度;和
7.限制值设定单元,根据由所述角速度检测单元检测到的旋转机构的角速度,对所述推定出的摩擦转矩设定限制该摩擦转矩的上限及下限的上下限制值。
8.在该一方案中,也可以是,所述限制值设定单元至少根据基于库伦摩擦及粘性摩擦的模型、所述角速度检测单元的测量误差以及所述旋转机构的角速度,来设定所述上下限制值。
9.在该一方案中,也可以是,所述限制值设定单元将在所述库伦摩擦及粘性摩擦的模型上使由所述角速度检测单元检测到的角速度偏移所述测量误差后的点的摩擦转矩的值设为暂定的上限值及下限值,算出对该暂定的上限值及下限值分别附加了规定的余裕值的上限值及下限值,将该算出的上限值及下限值设定为所述上下限制值。
10.在该一方案中,也可以是,还具备转矩推定单元,该转矩推定单元使用通过机器学习生成的摩擦转矩的推定模型来推定所述旋转机构的摩擦转矩,
11.所述转矩推定单元在判断为推定出的摩擦转矩没有超过由所述限制值设定单元设定的上下限制值的情况下,输出该摩擦转矩,在判断为推定出的摩擦转矩超过了由所述限制值设定单元设定的上下限制值的情况下,不输出该摩擦转矩。
12.用于达成上述目的的本发明的一方案也可以是一种转矩推定方法,推定旋转机构的摩擦转矩,其中,该转矩推定方法包括如下步骤:
13.检测所述旋转机构的角速度;和
14.根据所述检测到的旋转机构的角速度,对所述推定出的摩擦转矩设定限制该摩擦
转矩的上限及下限的上下限制值。
15.用于达成上述目的的本发明的一方案也可以是一种程序,该程序使计算机执行推定旋转机构的摩擦转矩的转矩推定方法,其中,
16.该转矩推定方法包括如下处理:根据所述旋转机构的角速度,对所述推定出的摩擦转矩设定限制该摩擦转矩的上限及下限的上下限制值。
17.根据本发明,能够提供一种能够在使机器人等的动作稳定化的同时抑制作业效率降低的转矩推定系统、转矩推定方法及程序。
18.本公开的上述和其他的目的、特征及优点将会根据下文给出的详细描述和附图而被更加充分地理解,附图仅以示意的方式给出,因此不应视为限制本公开。
附图说明
19.图1是示出机器人的关节部的控制方法的一例的框图。
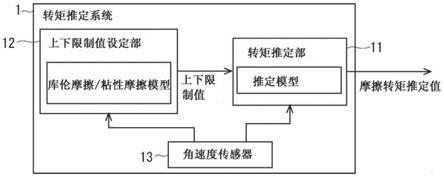
20.图2是示出本实施方式的转矩推定系统的概略性的系统构成的框图。
21.图3是用于说明摩擦转矩推定值的上下限制值的设定方法的图。
22.图4是用于说明摩擦转矩推定值的上下限制值的设定方法的图。
23.图5是示出本实施方式的转矩推定方法的流程的流程图。
具体实施方式
24.以下,参照附图对本发明的实施方式进行说明。图1是示出机器人的关节部的控制方法的一例的框图。本实施方式的转矩推定系统1推定机器人的关节部等旋转机构3的摩擦转矩。摩擦转矩是伴随于旋转机构3的各齿轮的旋转而产生的摩擦转矩。
25.转矩推定系统1例如将旋转机构3的角速度设为输入值,将旋转机构3的摩擦转矩设为输出,进行深度学习等机器学习而生成摩擦转矩的推定模型。转矩推定系统1使用生成的摩擦转矩的推定模型来推定摩擦转矩。机器人等的控制部2基于从转矩推定系统1输出的摩擦转矩的推定值(以下,摩擦转矩推定值),来进行各关节部等旋转机构3的电动机31的灵活控制。
26.为了使机器人稳定地动作而对控制部2的灵活控制中的位置指令值、速度指令值等指令值设定有限制值。控制部2具有例如在进行灵活控制时在各指令值超过了限制值的情况下使各关节部等旋转机构3的电动机31的动作停止等安全功能。
27.转矩推定系统1具有通常的计算机的硬件结构(图1),具备cpu(central processing unit,中央处理单元)、gpu(graphics processing unit,图形处理单元)等处理器1a、ram(random access memory,随机存取存储器)、rom(read only memory,只读存储器)等内部存储器1b、hdd(hard disk drive,硬盘驱动器)、sdd(solid state drive,固态驱动器)等存储设备1c、用于连接显示器等周边设备的输入输出i/f1d、以及与装置外部的设备进行通信的通信i/f1e。
28.转矩推定系统1例如通过处理器1a一边利用内部存储器1b一边执行在存储设备1c、内部存储器1b等中储存的程序,能够实现后述的各功能性的构成要素。
29.由于转矩推定系统如上述那样利用深度学习来推定摩擦转矩,所以有可能输出预想不到的摩擦转矩推定值。在使用该摩擦转矩推定值进行了机器人的灵活控制的情况下,
机器人的动作变得不稳定。相对于此,仅仅通过进行各指令值的限制等,存在因机器人的动作停止等而作业效率降低的担忧。
30.相对于此,本实施方式的转矩推定系统1根据旋转机构3的角速度,对推定出的摩擦转矩推定值设定限制摩擦转矩推定值的上限及下限的上下限制值。
31.通过上下限制值来限制预想不到的摩擦转矩推定值,摩擦转矩推定值会更加稳定。因此,控制部2通过使用该稳定的摩擦转矩推定值进行机器人等的灵活控制,能够在使机器人等的动作稳定化的同时抑制上述那样的机器人等的动作停止而抑制作业效率降低。
32.图2是示出本实施方式的转矩推定系统的概略性的系统构成的框图。本实施方式的转矩推定系统1具备:转矩推定部11,推定摩擦转矩;限制值设定部12,对摩擦转矩推定值设定上下限制值;以及角速度传感器13,检测旋转机构3的角速度。
33.转矩推定部11是转矩推定单元的一具体例。转矩推定部11将旋转机构3的角速度设为输入值,将旋转机构3的摩擦转矩设为输出,进行深度学习而生成摩擦转矩的推定模型。
34.推定模型例如构成为递归神经网络(rnn:recurrent neural network,循环神经网络)。推定模型也可以构成为lstm(long short
‑
term memory,长短期记忆网络)。推定模型也可以构成为卷积神经网络(cnn:convolutional neural network,卷积神经网络)。
35.转矩推定部11使用生成的摩擦转矩的推定模型来推定摩擦转矩,并作为摩擦转矩推定值而输出。在旋转机构3设置有角速度传感器13,检测旋转机构3的角速度。角速度传感器13是角速度检测单元的一具体例。转矩推定部11基于由角速度传感器13检测到的旋转机构3的角速度和摩擦转矩的推定模型,来算出摩擦转矩推定值。
36.限制值设定部12是限制值设定单元的一具体例。限制值设定部12根据旋转机构3的角速度来设定摩擦转矩推定值的上下限制值。转矩推定部11在判断为推定出的摩擦转矩推定值没有超过由限制值设定部12设定的上下限制值的情况下,输出该摩擦转矩推定值。另一方面,转矩推定部11在判断为推定出的摩擦转矩推定值超过了由限制值设定部12设定的上下限制值的情况下,不输出该超过的摩擦转矩推定值。由此,能够抑制从转矩推定部11输出超过了上下限制值的不稳定的摩擦转矩推定值。
37.接着,对摩擦转矩推定值的上下限制值的设定方法进行详细说明。限制值设定部12利用库伦摩擦及粘性摩擦的模型,根据旋转机构3的角速度使上下限制值变动。库伦摩擦及粘性摩擦的模型例如如图3所示,是示出基于旋转机构3的库伦摩擦及粘性摩擦算出的角速度与摩擦转矩的关系的模型。
38.此外,库伦摩擦及粘性摩擦的模型也可以是示出基于旋转机构3的库伦摩擦、粘性摩擦及温度算出的角速度与摩擦转矩的关系的模型。由此,使用考虑了温度的库伦摩擦及粘性摩擦的模型,能够更高精度地设定摩擦转矩推定值的上下限制值。
39.限制值设定部12基于库伦摩擦及粘性摩擦的模型、角速度传感器13的测量误差以及由角速度传感器13检测到的角速度,来设定上下限制值。摩擦转矩在角速度0附近大幅变动,所以通过以下的方法进行决定。
40.限制值设定部12基于由角速度传感器13检测到的角速度和角速度传感器13的测量误差,来设定暂定的上下限制值(上限值t1、下限值t2)。角速度传感器13的测量误差也可以预先设定于限制值设定部12,并设为用户能够任意地设定变更。
41.例如,如图3所示,在测量误差为
±
α的情况下,限制值设定部12将在库伦摩擦及粘性摩擦的模型上使检测到的角速度x的值偏移
±
α后的点的摩擦转矩的值分别设为上限值t1及下限值t2。
42.接着,限制值设定部12如图4所示,算出考虑安全性而对上限值t1及下限值t2分别附加了余裕值
±
β的上限值tt1及下限值tt2。余裕值
±
β也可以预先设定于限制值设定部12,设为用户能够任意地设定变更。限制值设定部12将算出的上限值tt1及下限值tt2设定为上下限制值。通过如上述那样设定上下限制值,能够设定进行制约但不会过于宽松的合适的值且不会大幅限制原本的功能、性能的根据角速度而变动的限制值。
43.接下来,对本实施方式的转矩推定方法的流程进行说明。图5是示出本实施方式的转矩推定方法的流程的流程图。
44.限制值设定部12基于库伦摩擦及粘性摩擦的模型、由角速度传感器13检测到的角速度以及角速度传感器13的测量误差,来设定上限值t1、下限值t2(步骤s501)。
45.限制值设定部12算出对上限值t1及下限值t2分别附加了余裕值
±
β后的上限值tt1及下限值tt2,将算出的上限值tt1及下限值tt2设定为上下限制值(步骤s502)。
46.转矩推定部11基于由角速度传感器13检测到的旋转机构3的角速度和摩擦转矩的推定模型,来算出摩擦转矩推定值(步骤s503)。
47.转矩推定部11判断推定出的摩擦转矩推定值是否超过了由限制值设定部12设定的上下限制值(步骤s504)。转矩推定部11在判断为推定出的摩擦转矩推定值超过了上下限制值时(步骤s504的是),不输出该超过了的摩擦转矩推定值(步骤s505)。另一方面,转矩推定部11在判断为推定出的摩擦转矩推定值没有超过上下限制值时(步骤s504的否),输出该摩擦转矩推定值(步骤s506)。
48.以上,本实施方式的转矩推定系统1具备根据旋转机构3的角速度而对推定出的摩擦转矩设定限制摩擦转矩的上限及下限的上下限制值的限制值设定部12。由此,通过上下限制值使摩擦转矩推定值稳定,所以,能够在使机器人等的动作稳定化的同时抑制作业效率降低。
49.对本发明的几个实施方式进行了说明,但这些实施方式是作为例子而提示的,并非意在限定发明的范围。这些新的实施方式能够以其他各种形态实施,能够在不脱离发明的主旨的范围内进行各种省略、置换、变更。这些实施方式及其变形包含于发明的范围、主旨,并且包含于专利的权利要求书中记载的发明和与其等同的范围。
50.本发明也可以例如通过使处理器1a执行计算机程序来实现图5所示的处理。
51.程序可以使用各种类型的非瞬时性的计算机可读介质(non
‑
transitory computer readable medium)来储存并向计算机供给。非瞬时性的计算机可读介质包括各种类型的具有实体的记录介质(tangible storage medium,有形存储介质)。非瞬时性的计算机可读介质的例子,包括磁记录介质(例如软盘、磁带、硬盘驱动器)、光磁记录介质(例如光磁盘)、cd
‑
rom(read only memory,只读存储器)、cd
‑
r、cd
‑
r/w、半导体存储器(例如掩模rom、prom(programmable rom,可编程rom)、eprom(erasable prom,可擦写prom)、闪速rom、ram(random access memory,随机存取存储器))。
52.程序也可以通过各种类型的瞬时性的计算机可读介质(transitory computer readable medium)向计算机供给。瞬时性的计算机可读介质的例子包括电信号、光信号以
及电磁波。瞬时性的计算机可读介质可以经由电线及光纤等有线通信路或无线通信路而将程序向计算机供给。
53.此外,构成上述的各实施方式的转矩推定系统1的各部分,不仅可以通过程序实现,也可以通过asic(application specific integrated circuit,专用集成电路)、fpga(field
‑
programmable gate array,现场可编程门阵列)等专用的硬件来实现其一部分或全部。
54.根据这样描述的本公开,显而易见的是,能够以许多方式改变本公开的实施例。这样的变化不应被认为是脱离了本公开的主旨和范围,并且对于本领域技术人员显而易见的所有这样的修改旨在包含于所附权利要求的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1