基于形状记忆合金弹簧的柔性驱动器
1.本发明涉及机器人驱动设备应用技术领域,具体涉及基于形状记忆合金弹簧的柔性驱动器。
背景技术:
2.目前,市面上的关节驱动器往往是刚性驱动器,其结构大多基于“电机+刚性传动副”进行直接驱动各关节的方式,该方式一方面存在结构复杂、体积大、重量大、安装不便的问题,另一方面无法避免的具有运动僵硬、不连贯的缺点。
3.因此,有必要研发一种能解决上述问题的柔性驱动器。
技术实现要素:
4.本发明的目的是提供一种基于形状记忆合金弹簧的柔性驱动器,以解决现有技术中存在的问题。
5.为实现本发明目的而采用的技术方案是这样的,基于形状记忆合金弹簧的柔性驱动器,包括顶盖、底座、若干定位轴、输出组件和驱动部件。
6.两个所述底座重叠布置且相互连接,底座的中心处设置有通孔ⅰ。
7.所述输出组件包括输出转轴和两个转轴推盘,每个底座背向另一个底座的一侧设置有转轴推盘,转轴推盘的中心处设置有供输出转轴安装的通孔ⅱ,输出转轴穿过通孔ⅰ和两个通孔ⅱ,输出转轴的中段通过滚珠轴承与两个底座连接,输出转轴与两个转轴推盘固接。
8.每个所述转轴推盘背向另一个转轴推盘的一侧间隔布置有若干缠绕柱,若干缠绕柱分布在输出转轴的周围。
9.所述底座上设置有若干供定位轴安装的通孔ⅲ,若干通孔ⅲ间隔布置在输出转轴的周围,若干定位轴穿过两个底座的通孔ⅲ,定位轴的中段与两个底座固定。
10.所述驱动部件包括两个驱动组,驱动组包括弹性丝、形状记忆合金弹簧、滑动推盘和伸缩杆,伸缩杆上连接有两个滑动推盘,形状记忆合金弹簧套在伸缩杆上并位于两个滑动推盘之间,形状记忆合金弹簧的两端分别与两个滑动推盘连接。
11.两个所述伸缩杆设置在相邻两个定位轴之间,两个伸缩杆分别靠近定位轴的上下端。
12.每个所述伸缩杆的两端分别与弹性丝的两端连接,弹性丝绕过若干定位轴和若干缠绕柱,被同一弹性丝缠绕的相邻两个缠绕柱之间的弹性丝上缠绕有定位轴。
13.所述顶盖设置有供输出转轴穿过的通孔ⅳ和若干供定位轴穿过的通孔
ⅴ
,两个顶盖分别扣合并连接在两个底座上,输出转轴的两端穿过通孔ⅳ并伸出顶盖,定位轴的两端穿过通孔
ⅴ
并与顶盖固定。
14.工作时,对所述形状记忆合金弹簧通电,形状记忆合金弹簧升温至相变温度时产生收缩,输出组件在弹性丝和定位轴的作用下发生转动。
15.进一步,所述转轴推盘呈等边三角形,转轴推盘的每个角经圆角处理。
16.进一步,所述缠绕柱的外壁上设置有与其同轴的环形凹槽ⅰ,绕过缠绕柱的弹性丝嵌入环形凹槽ⅰ。
17.所述定位轴的外壁上设置有与其同轴的两个环形凹槽ⅱ,两个环形凹槽ⅱ分别靠近定位轴的上下端,绕过定位轴的弹性丝嵌入环形凹槽ⅱ。
18.进一步,每个所述底座上均设置有两个耳板,两个底座通过耳板和螺栓连接,底座通过耳板与外部装置连接。
19.进一步,所述通孔ⅲ设置有内螺纹,定位轴的中段设置有外螺纹,外螺纹的长度大于等于两个内螺纹的长度和,定位轴与两个底座采用螺纹连接。
20.进一步,所述底座与顶盖采用螺纹连接,顶盖的侧壁上设置有若干通风孔,断电后的形状记忆合金弹簧通过若干通风孔散热冷却,通风孔为方形孔。
21.进一步,所述输出转轴与每个转轴推盘的连接处均安装有垫片和轴用卡簧。
22.一种机器关节,包括第一关节部和第二关节部,所述第一关节部包括上述的柔性驱动器。所述柔性驱动器的输出转轴连接第二关节部。
23.一种基于上述的机器关节的驱动方法,计算得到所述输出转轴各位置下形状记忆合金弹簧的通电时间和电流数值,由上位机将相关指令下达给形状记忆合金弹簧两端的通电电源,通过控制电源的通电电流大小和通电时间来达到对机器关节的控制。
24.一种机器人,包括上述的机器关节。
25.本发明的有益效果在于:
26.1.本发明设计柔性驱动器装置结构简洁,体积小巧,方便布置,可以为需要柔性驱动器的机械人设计和外骨骼设计提供新的驱动方案;
27.2.本发明弥补了现有缺乏类似柔性驱动器的缺陷,以满足柔性驱动器的使用需求,同时也促进对新材料形状记忆合金弹簧的创新使用;
28.3.本发明解决了形状记忆合金驱动器驱动行程小,不易更换不同形状记忆合金的问题,同时将形状记忆合金线性驱动转换为更适合驱动器的转动驱动方式。
附图说明
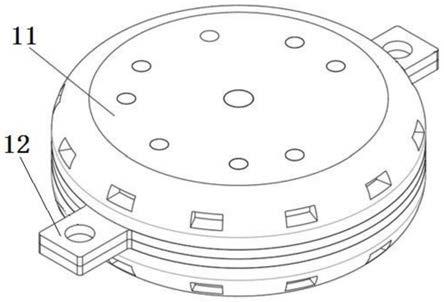
29.图1为顶盖与底座的连接示意图;
30.图2为本发明装置的内部示意图;
31.图3为输出组件的示意图;
32.图4为驱动部件的示意图。
33.图中:顶盖11、底座12、定位轴21、输出组件30、输出转轴31、转轴推盘32、垫片33、轴用卡簧34、滚珠轴承35、缠绕柱36、驱动部件40、弹性丝41、形状记忆合金弹簧42、滑动推盘43和伸缩杆44。
具体实施方式
34.下面结合实施例对本发明作进一步说明,但不应该理解为本发明上述主题范围仅限于下述实施例。在不脱离本发明上述技术思想的情况下,根据本领域普通技术知识和惯用手段,做出各种替换和变更,均应包括在本发明的保护范围内。
35.实施例1:
36.本实施例公开了基于形状记忆合金弹簧的柔性驱动器,包括顶盖11、底座12、定位轴21、输出组件30和驱动部件40。
37.两个所述底座12重叠布置且相互连接,底座12的中心处设置有通孔ⅰ。参见图1或2,每个所述底座12上均设置有两个耳板,两个底座12通过耳板和螺栓连接,底座12通过耳板与外部装置连接。
38.所述输出组件30包括输出转轴31和两个转轴推盘32,转轴推盘32呈等边三角形,转轴推盘32的每个角经圆角处理。
39.参见图2,每个上述底座12背向另一个底座12的一侧设置有转轴推盘32,转轴推盘32的中心处设置有供输出转轴31安装的通孔ⅱ,输出转轴31穿过通孔ⅰ和两个通孔ⅱ,参见图3,输出转轴31的中段通过滚珠轴承35与两个底座12连接,输出转轴31与两个转轴推盘32固接。所述输出转轴31与每个转轴推盘32的连接处均安装有垫片33和轴用卡簧34,用于防止输出转轴31和转轴推盘32的轴向晃动。
40.参见图3,每个所述转轴推盘32背向另一个转轴推盘32的一侧间隔布置有三根缠绕柱36,三根缠绕柱36分布在输出转轴31的周围且分别位于转轴推盘32的三个角上。
41.所述底座12上设置有供八根定位轴21安装的通孔ⅲ,八根通孔ⅲ间隔布置在输出转轴31的周围,某相邻两根定位轴21的间距大于其他定位轴21之间的间距,方便后续伸缩杆44的安装。
42.八根所述定位轴21穿过两个底座12的通孔ⅲ,定位轴21的中段与两个底座12固定。
43.所述通孔ⅲ设置有内螺纹,定位轴21的中段设置有外螺纹,外螺纹的长度大于等于两个内螺纹的长度和,定位轴21与两个底座12采用螺纹连接。
44.所述驱动部件40包括两个驱动组,参见图4,驱动组包括弹性丝41、形状记忆合金弹簧42、滑动推盘43和伸缩杆44,伸缩杆44上连接有两个滑动推盘43,形状记忆合金弹簧42套在伸缩杆44上并位于两个滑动推盘43之间,形状记忆合金弹簧42的两端分别与两个滑动推盘43连接。
45.两个所述伸缩杆44设置在间距最大的相邻两个定位轴21之间,两个伸缩杆44分别靠近定位轴21的上下端。
46.参见图4,每个所述伸缩杆44的两端分别与弹性丝41的两端连接,弹性丝41绕过八根定位轴21和三根缠绕柱36,被同一弹性丝41缠绕的相邻两个缠绕柱36之间的弹性丝41上缠绕有定位轴21。
47.在本实施例中,所述弹性丝41从伸缩杆44的一端出发,依次绕过第一根定位轴21、第一根缠绕柱36、第二根定位轴21、第三根定位轴21、第四根定位轴21、第二根缠绕柱36、第五根定位轴21、第六根定位轴21、第七根定位轴21、第三根缠绕柱36和第八根定位轴21,最后连接在伸缩杆44的另一端。
48.所述缠绕柱36的外壁上设置有与其同轴的环形凹槽ⅰ,绕过缠绕柱36的弹性丝41嵌入环形凹槽ⅰ。所述定位轴21的外壁上设置有与其同轴的两个环形凹槽ⅱ,两个环形凹槽ⅱ分别靠近定位轴21的上下端,绕过定位轴21的弹性丝41嵌入环形凹槽ⅱ。所述环形凹槽ⅰ和环形凹槽ⅱ可防止弹性丝41在运动中沿固定轴21轴向滑动。
49.参见图1,所述顶盖11设置有供输出转轴31穿过的通孔ⅳ和八个供定位轴21穿过的通孔
ⅴ
,两个顶盖11分别扣合并连接在两个底座12上,输出转轴31的两端穿过通孔ⅳ并伸出顶盖11,定位轴21的两端穿过通孔
ⅴ
并与顶盖11固定。
50.所述底座12与顶盖11采用螺纹连接,顶盖11的侧壁上设置有多个通风孔,通风孔为方形孔。
51.在第一种工作过程中,将所述形状记忆合金弹簧42的两端连上导线通入电流,形状记忆合金弹簧42通电后发热升温,当形状记忆合金弹簧42升温至相变温度,形状记忆合金弹簧42发生收缩即沿轴向收缩,带动滑动推盘43沿伸缩杆44的轴向移动,同时弹性丝41受拉力,于是沿固定于滑动推盘43的一端移动。所述转轴推盘32的三个缠绕柱36均受到弹性丝41的切向拉力,输出转轴31受到经转轴推盘32转换的力矩产生转动,实现输出转轴31对外输出功率。
52.将所述形状记忆合金弹簧42的两端分别记为a端和b端,在第二种工作过程中,对形状记忆合金弹簧42的a端通电,形状记忆合金弹簧42的a端升温至相变温度时产生收缩,输出组件30在弹性丝41和定位轴21的作用下发生转动,转动方向为a向。
53.在第三种工作过程中,对所述形状记忆合金弹簧42的b端通电,形状记忆合金弹簧42的b端升温至相变温度时产生收缩,输出组件30在弹性丝41和定位轴21的作用下发生转动,转动方向为b向,a向与b向相反。
54.当需要所述形状记忆合金弹簧42恢复自然状态时,对形状记忆合金弹簧42断电,形状记忆合金弹簧42通过多个通风孔散热冷却,形状记忆合金弹簧42的恢复力带动输出组件30恢复到初始位置。所述通风孔能使形状记忆合金弹簧42加速冷却至常温,缩短形状记忆合金弹簧42的响应周期。
55.值得说明的是,若需要更换不同的所述形状记忆合金弹簧42,可直接取下原来的形状记忆合金弹簧42,按原先的固定方式与伸缩杆44和滑动推盘43连接,再组装即可。
56.实施例2:
57.本实施例公开了一种机器关节,包括第一关节部和第二关节部,所述第一关节部包括如实施例1所述的柔性驱动器。所述柔性驱动器的输出转轴31连接第二关节部。
58.实施例3:
59.本实施例公开了一种基于实施例2所述的机器关节的驱动方法,包括以下步骤:计算得到所述输出转轴31各位置下形状记忆合金弹簧42的通电时间和电流数值,由上位机将相关指令下达给形状记忆合金弹簧42两端的通电电源,通过控制电源的通电电流大小和通电时间来达到对机器关节的控制。
60.实施例4:
61.本实施例公开了一种机器人,包括如实施例2所述的机器关节。
62.实施例5:
63.本实施例公开了基于形状记忆合金弹簧的柔性驱动器,包括顶盖11、底座12、多个定位轴21、输出组件30和驱动部件40。
64.两个所述底座12重叠布置且相互连接,底座12的中心处设置有通孔ⅰ。
65.所述输出组件30包括输出转轴31和两个转轴推盘32,参见图2,每个底座12背向另一个底座12的一侧设置有转轴推盘32,转轴推盘32的中心处设置有供输出转轴31安装的通
孔ⅱ,输出转轴31穿过通孔ⅰ和两个通孔ⅱ,参见图3,输出转轴31的中段通过滚珠轴承35与两个底座12连接,输出转轴31与两个转轴推盘32固接。
66.参见图3,每个所述转轴推盘32背向另一个转轴推盘32的一侧间隔布置有多个缠绕柱36,多个缠绕柱36分布在输出转轴31的周围。
67.所述底座12上设置有多个供定位轴21安装的通孔ⅲ,多个通孔ⅲ间隔布置在输出转轴31的周围,多个定位轴21穿过两个底座12的通孔ⅲ,定位轴21的中段与两个底座12固定。
68.所述驱动部件40包括两个驱动组,参见图4,驱动组包括弹性丝41、形状记忆合金弹簧42、滑动推盘43和伸缩杆44,伸缩杆44上连接有两个滑动推盘43,形状记忆合金弹簧42套在伸缩杆44上并位于两个滑动推盘43之间,形状记忆合金弹簧42的两端分别与两个滑动推盘43连接。
69.两个所述伸缩杆44设置在相邻两个定位轴21之间,两个伸缩杆44分别靠近定位轴21的上下端。
70.参见图4,每个所述伸缩杆44的两端分别与弹性丝41的两端连接,弹性丝41绕过多个定位轴21和多个缠绕柱36,被同一弹性丝41缠绕的相邻两个缠绕柱36之间的弹性丝41上缠绕有定位轴21。
71.参见图1,所述顶盖11设置有供输出转轴31穿过的通孔ⅳ和多个供定位轴21穿过的通孔
ⅴ
,两个顶盖11分别扣合并连接在两个底座12上,输出转轴31的两端穿过通孔ⅳ并伸出顶盖11,定位轴21的两端穿过通孔
ⅴ
并与顶盖11固定。
72.工作时,对所述形状记忆合金弹簧42通电,形状记忆合金弹簧42升温至相变温度时产生收缩,输出组件30在弹性丝41和定位轴21的作用下发生转动。
73.实施例6:
74.本实施例主要结构同实施例5,进一步,参见图2、3或4,所述转轴推盘32呈等边三角形,转轴推盘32的每个角经圆角处理。
75.实施例7:
76.本实施例主要结构同实施例5,进一步,参见图2、3或4,所述缠绕柱36的外壁上设置有与其同轴的环形凹槽ⅰ,绕过缠绕柱36的弹性丝41嵌入环形凹槽ⅰ。
77.参见图2或4,所述定位轴21的外壁上设置有与其同轴的两个环形凹槽ⅱ,两个环形凹槽ⅱ分别靠近定位轴21的上下端,绕过定位轴21的弹性丝41嵌入环形凹槽ⅱ。
78.实施例8:
79.本实施例主要结构同实施例5,进一步,参见图1或2,每个所述底座12上均设置有两个耳板,两个底座12通过耳板和螺栓连接,底座12通过耳板与外部装置连接。
80.实施例9:
81.本实施例主要结构同实施例5,进一步,所述通孔ⅲ设置有内螺纹,定位轴21的中段设置有外螺纹,外螺纹的长度大于等于两个内螺纹的长度和,定位轴21与两个底座12采用螺纹连接。
82.实施例10:
83.本实施例主要结构同实施例5,进一步,所述底座12与顶盖11采用螺纹连接,参见图1或2,所述顶盖11的侧壁上设置有多个通风孔,断电后的形状记忆合金弹簧42通过多个
通风孔散热冷却,通风孔为方形孔。
84.实施例11:
85.本实施例主要结构同实施例5,进一步,参见图3,所述输出转轴31与每个转轴推盘32的连接处均安装有垫片33和轴用卡簧34。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1