一种具有多功能的环境监测智能拍摄机器人的制作方法
1.本发明涉及一种智能拍摄机器人,具体为一种具有多功能的环境监测智能拍摄机器人,属于环境监测技术领域。
背景技术:
2.环境监测的目的是准确、及时、全面地反映环境质量现状及发展趋势,为环境管理、污染源控制、环境规划等提供科学依据,根据环境质量标准,评价环境质量,根据污染特点、分布情况和环境条件,追踪寻找污染源、提供污染变化趋势,为实现监督管理、控制污染提供依据,而在环境监测过程中多需要拍摄取证,故此具有环境监测拍摄功能的智能机器人便应时而生。
3.现有的具有环境监测功能的智能机器人在使用时往往只能够对单一方向进行拍摄工作,若需调转拍摄角度,往往需要整体移动智能机器人,同时拍摄所用到的摄像头在使用过后还需要拆卸下来单独保存,频繁的拆卸极易导致摄像头后续再安装时出现松动,进而可能会导致拍摄取样的图像出现模糊不清的状况,从而影响取样结果。
技术实现要素:
4.本发明的目的就在于为了解决上述问题而提供一种具有多功能的环境监测智能拍摄机器人。
5.本发明通过以下技术方案来实现上述目的,一种具有多功能的环境监测智能拍摄机器人,包括:
6.固定底座,所述固定底座的上表面固定连接有固定套杆,所述固定套杆的内部套设有连接杆,所述连接杆的顶端转动连接有支撑杆,所述支撑杆的顶端固定连接有保护壳,所述保护壳的内部固定安装有摄像头;
7.收纳盒,所述收纳盒固定安装于固定套杆的顶端,且所述收纳盒设置于连接杆和支撑杆的外侧,通过连接杆和支撑杆的导向作用可将摄像头收纳至收纳盒的内部;
8.活动盖板,所述活动盖板设置于收纳盒的顶端;
9.扣紧装置,所述扣紧装置设置于连接杆的两侧;
10.定位装置,所述定位装置设置于连接杆的内部。
11.优选的,所述保护壳的顶端固定连接有连接块,所述连接块的顶端设置有活动挡板,所述活动挡板的上表面固定连接有把手。
12.优选的,所述收纳盒顶端的两侧均开设有滑槽,所述滑槽的内部套设有滑块,所述滑块的顶端与活动盖板的底端固定连接。
13.优选的,所述滑槽的内部固定嵌设有固定板,所述固定板的中部固定套设有固定柱,所述固定柱的两端分别与滑槽内壁的两侧固定连接,且所述固定柱分别贯穿两个滑块的中部。
14.优选的,所述扣紧装置包括弧形槽、螺纹杆、拉杆和螺纹槽,所述弧形槽开设于活
动盖板的一侧,所述螺纹杆贯穿弧形槽并套设于活动盖板的内部,所述拉杆的一端贯穿活动盖板的一侧并与螺纹杆的一端固定连接,所述螺纹槽开设于连接杆和连接块的两侧,且所述螺纹杆与螺纹槽相互对应。
15.优选的,所述活动盖板的内部开设有连接槽,所述连接槽套接于拉杆的外侧,所述连接槽的内部套设有连接板,所述连接板套接于拉杆的外侧,所述连接板的两侧均固定连接有导向块,所述连接槽内壁的两侧均开设有套接于导向块外侧的导向槽。
16.优选的,所述连接板的内部开设有环形槽,所述环形槽的内部套设有连接盘,所述连接盘固定套接于拉杆的外侧。
17.优选的,所述活动挡板下表面的两侧均固定连接有卡接块,所述活动盖板的上表面开设有与卡接块相互配合的通槽,且所述通槽与连接槽的内部相互连通,两个所述卡接块的一侧均对称开设有两个卡接槽,所述连接板的一侧对称固定连接有两个与卡接槽相互配合的卡接杆。
18.优选的,所述定位装置包括联动杆、空腔、联动板、定位杆、定位槽和复位弹簧,所述联动杆固定连接于支撑杆的底端,所述空腔开设于连接杆的顶部,所述联动板套设于空腔的内部,且所述联动板与联动杆固定连接,所述定位杆设置为两个,且两个所述定位杆对称固定连接于联动板的下表面,所述定位槽设置为多个,且所述定位槽呈环形等距阵列开设于空腔内壁的底端,且所述定位槽与定位杆相互配合,所述复位弹簧固定安装于联动板的下表面,且所述复位弹簧的底端与连接杆的内部固定连接。
19.优选的,所述活动挡板的下表面开设有凹槽,所述凹槽的内部套设有滑杆,所述滑杆的一侧与连接块固定连接,所述凹槽内壁的两侧均开设有限位槽,两个所述限位槽的内部均滑动套设有限位块,两个所述限位块相对的一侧分别与滑杆的两侧固定连接。
20.本发明的有益效果是:其一、本发明利用收纳盒的设计,在不使用的情况下操作者将摄像头收纳到收纳盒的内部,在通过闭合活动盖板可以使摄像头稳定的放置在收纳盒的内部,同时配合活动挡板的作用可以使收纳盒上方不会存在缝隙,以此保证摄像头收纳到收纳盒的内部之后,外界的灰尘不会进入到收纳盒的内部,从而摄像头的镜面处不会粘附灰尘。
21.其二、本发明利用活动挡板的设计,活动挡板可以在保护壳的上方进行平移,在阴雨天气使用该装置时,可将活动挡板向摄像头的镜面方向推动,以此保证雨水不会粘附在摄像头的镜面上,从而使摄像头采样的环境图样更为的清晰,以此便可增加采样结果的准确性。
22.其三、本发明利用扣紧装置的设计,摄像头从收纳盒的内部取出之时,保护壳会带动连接杆向固定套杆的外侧滑动,当摄像头调整到所需高度之后,操作者可通过扣紧装置对连接杆进行固定,以此保证摄像头不会在自身的重力作用下向下移动,从而保证拍摄采样过程中摄像头的稳定,使采样结果更具说服力。
23.其四、本发明利用定位装置的设计,在需要调整拍摄角度时,操作者可先行向上拉动保护壳,保护壳带动支撑杆向连接杆的外侧滑动,连接杆可带动联动杆和联动板同步移动,联动板可将定位杆从定位槽的内部带出,以此便可解除支撑杆的限制,操作者只需直接转动保护壳调整摄像头的朝向,从而无需移动整体装置便可完成,增加了拍照采样过程的便捷性。
24.其五、本发明利用连接板、卡接块和卡接杆的设计,不使用的情况下,活动挡板可带动卡接块通过通槽卡合进入到连接槽的内部,并且卡接块可以套接在拉杆的外侧,通过按压拉杆可带动连接板同步移动,连接板便能够带动卡接杆卡合进入到卡接块侧面的卡接槽的内部,以此便能够将活动挡板稳定的固定在收纳盒的上方。
附图说明
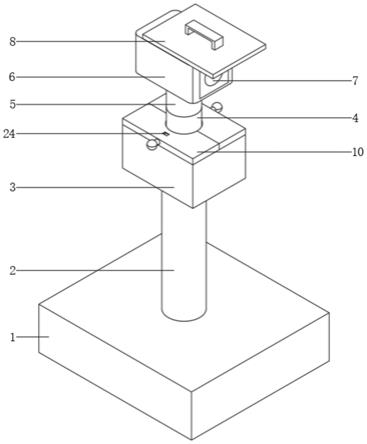
25.图1为本发明整体结构示意图;
26.图2为本发明活动盖板打开结构示意图;
27.图3为本发明图2中a处放大结构示意图;
28.图4为本发明活动盖板内部俯视剖面结构示意图;
29.图5为本发明图4中b处放大结构示意图;
30.图6为本发明连接杆与支撑杆连接处结构示意图;
31.图7为本发明空腔内部爆炸结构示意图;
32.图8为本发明活动盖板下表面结构示意图;
33.图9为本发明图8中c处放大结构示意图。
34.图中:1、固定底座;2、固定套杆;3、收纳盒;4、连接杆;5、支撑杆;6、保护壳;7、摄像头;8、活动挡板;9、把手;10、活动盖板;11、弧形槽;12、螺纹杆;13、拉杆;14、滑槽;15、滑块;16、固定板;17、固定柱;18、连接槽;19、连接板;20、导向槽;21、导向块;22、环形槽;23、连接盘;24、通槽;25、卡接块;26、卡接杆;27、联动杆;28、空腔;29、联动板;30、定位杆;31、定位槽;32、复位弹簧;33、连接块;34、螺纹槽;35、凹槽;36、滑杆;37、限位槽;38、限位块。
具体实施方式
35.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
36.请参阅图1
‑
9所示,一种具有多功能的环境监测智能拍摄机器人,包括固定底座1,固定底座1起到配重的作用,保证整体装置使用时相对稳定,固定底座1的上表面固定连接有固定套杆2,固定套杆2的内部套设有连接杆4,连接杆4的顶端转动连接有支撑杆5,固定套杆2、连接杆4和支撑杆5为同一型号的刚性材料,支撑杆5的顶端固定连接有保护壳6,保护壳6的内部固定安装有摄像头7,摄像头7用于对外界环境进行拍摄采样,保护壳6能够保护摄像头7在使用过程中不易受到外力撞击而损坏,保护壳6的顶端固定连接有连接块33,连接块33的顶端设置有活动挡板8,活动挡板8的上表面固定连接有把手9,把手9的设计方便操作者提升或推动活动挡板8,把手9的外壁固定套接有防滑垫,以此可增加操作者手部与把手9之间的摩擦力;
37.收纳盒3,收纳盒3固定安装于固定套杆2的顶端,且收纳盒3设置于连接杆4和支撑杆5的外侧,通过连接杆4和支撑杆5的导向作用可将摄像头7收纳至收纳盒3的内部,收纳至收纳盒3内部的摄像头7的镜头处不易遭受外界灰尘的污染,进而可减小摄像头7的清洗工作;
38.参照附图2和附图3,活动盖板10,活动盖板10设置于收纳盒3的顶端,活动盖板10设置为两个,且两个活动盖板10关于收纳盒3的中部对称设计,收纳盒3顶端的两侧均开设有滑槽14,滑槽14的内部套设有滑块15,滑块15的顶端与活动盖板10的底端固定连接,滑块15在滑槽14的滑动可以为活动盖板10的移动起到导向的作用,以此可防止活动盖板10在移动时发生偏移,滑槽14的内部固定嵌设有固定板16,固定板16的中部固定套设有固定柱17,固定柱17呈横向设置,固定柱17受固定板16的支撑作用,从而使固定柱17不会受到过大的扭矩力,固定柱17的两端分别与滑槽14内壁的两侧固定连接,且固定柱17分别贯穿两个滑块15的中部,套接在固定柱17外侧的滑块15不会从滑槽14的内部中脱离出去,从而保证活动盖板10不需要单独的存放,避免了活动盖板10丢失的情况发生。
39.作为本发明的一种技术优化方案,参照附图2、附图4和附图6,扣紧装置,扣紧装置设置于连接杆4的两侧,扣紧装置包括弧形槽11、螺纹杆12、拉杆13和螺纹槽34,弧形槽11开设于活动盖板10的一侧,弧形槽11内部的弧度与连接杆4的外圈弧度一致,从而弧形槽11的内壁能够与连接杆4的外壁紧密的贴合在一起,螺纹杆12贯穿弧形槽11并套设于活动盖板10的内部,活动盖板10的内部设置为光滑面,拉杆13的一端贯穿活动盖板10的一侧并与螺纹杆12的一端固定连接,拉杆13与螺纹杆12均能够在活动盖板10的内部进行转动,螺纹槽34开设于连接杆4和连接块33的两侧,且螺纹杆12与螺纹槽34相互对应。
40.根据上述结构,螺纹杆12拧入到连接杆4侧面的螺纹槽34的内部之后,连接杆4将不会沿着固定套杆2的内部下降,以此保证摄像头7从收纳盒3的内部移出之后相对稳定,保证摄像头7拍摄采样时不会晃动,螺纹杆12拧入到连接块33侧面的螺纹槽34的内部之后,活动挡板8将贴合在活动盖板10的上方,以此能够对两个弧形槽11之间的空隙进行密闭处理,进而能够防止外界的灰尘进入到收纳盒3的内部,保护了摄像头7的镜头处不会粘附灰尘。
41.作为本发明的一种技术优化方案,参照附图4和附图5,活动盖板10的内部开设有连接槽18,连接槽18套接于拉杆13的外侧,连接槽18的内部套设有连接板19,连接板19的外壁与连接槽18的内壁相互贴合在一起,连接板19的内部开设有环形槽22,环形槽22的内部套设有连接盘23,连接盘23的外壁与环形槽22的内壁均加工为光滑面,以此可减小连接盘23与环形槽22之间的摩擦力,连接盘23固定套接于拉杆13的外侧,连接板19套接于拉杆13的外侧,连接板19的两侧均固定连接有导向块21,连接槽18内壁的两侧均开设有套接于导向块21外侧的导向槽20。
42.根据上述结构,拉杆13转动的同时会带动连接盘23在环形槽22的内部转动,再结合导向块21只能够在导向槽20的水平移动的限制作用,连接板19只能够进行水平方向的移动,进而连接板19不会伴随连接盘23同步转动,进而便可保证拉杆13转动时不会出现卡顿,保证螺纹杆12能够更为流畅的进入到螺纹槽34的内部。
43.作为本发明的一种技术优化方案,参照附图1、附图5和附图8,活动挡板8下表面的两侧均固定连接有卡接块25,卡接块25设置为倒u形,并且卡接块25能够套接在拉杆13的外侧,活动盖板10的上表面开设有与卡接块25相互配合的通槽24,将摄像头7收纳到收纳盒3的内部之后,卡接块25进入到通槽24的内部后可使活动挡板8与活动盖板10相互平齐,进而避免了活动挡板8延伸至收纳盒3的外侧,以此减小不必要占用空间,且通槽24与连接槽18的内部相互连通,两个卡接块25的一侧均对称开设有两个卡接槽,连接板19的一侧对称固定连接有两个与卡接槽相互配合的卡接杆26,卡接杆26卡合进入到卡接槽的内部之后,卡
接块25受到限制,进而使活动挡板8能够稳定的贴合在活动盖板10的上方。
44.作为本发明的一种技术优化方案,参照附图6和附图7,定位装置,定位装置设置于连接杆4的内部,定位装置包括联动杆27、空腔28、联动板29、定位杆30、定位槽31和复位弹簧32,联动杆27固定连接于支撑杆5的底端,空腔28开设于连接杆4的顶部,联动板29套设于空腔28的内部,空腔28为联动板29提供一定的活动空间,且联动板29与联动杆27固定连接,定位杆30设置为两个,且两个定位杆30对称固定连接于联动板29的下表面,定位槽31设置为多个,且定位槽31呈环形等距阵列开设于空腔28内壁的底端,且定位槽31与定位杆30相互配合,多个定位槽31能够为多角度调节的摄像头7进行定位,以此使摄像头7旋转定位过后不会抖动,复位弹簧32固定安装于联动板29的下表面,且复位弹簧32的底端与连接杆4的内部固定连接,复位弹簧32初始为不受力状态且与空腔28内壁的底端相互平齐。
45.作为本发明的一种技术优化方案,参照附图8,活动挡板8的下表面开设有凹槽35,凹槽35的内部套设有滑杆36,滑杆36的长度与连接块33的宽度一致,滑杆36的一侧与连接块33固定连接,凹槽35内壁的两侧均开设有限位槽37,两个限位槽37的内部均滑动套设有限位块38,两个限位块38相对的一侧分别与滑杆36的两侧固定连接。
46.根据上述结构,在阴雨天气时,可将活动挡板8向摄像头7的镜头处推动,以此能够对摄像头7的镜头处进行遮挡,并且滑杆36受限位块38和限位槽37的限制不会从凹槽35的内部中脱离出来,保证了整体装置的完整性。
47.本发明在使用时,操作者首先旋转拉杆13,拉杆13带动螺纹杆12从螺纹槽34的内部向外转动,直至螺纹杆12完全脱离螺纹槽34的内部之后停止,此时连接杆4的限制便被解除,然后操作者直接拉动拉杆13,拉杆13带动连接板19挤压活动盖板10,活动盖板10受力带动滑块15沿着滑槽14的内部滑动,以此便可逐渐将收纳盒3的上端口打开,且滑块15移动时始终受到固定柱17的限制,从而打开后的活动盖板10不用从收纳盒3的端部移走。
48.连接板19伴随拉杆13移动的同时,连接板19带动卡接杆26向卡接槽的外侧移动,连接板19挤压活动盖板10的同时,卡接杆26从卡接槽的内部完全滑出,进而卡接块25便不受外力限制,从而活动挡板8也不受到外力的限制。
49.操作者握住把手9并向上提升,把手9牵引活动挡板8,活动挡板8通过连接块33带动保护壳6向收纳盒3的外侧移动,保护壳6带动支撑杆5向上移动,支撑杆5带动联动杆27向上移动,联动杆27带动联动板29挤压连接杆4,连接杆4受力将从固定套杆2的内部滑出,直至将保护壳6提升到所需高度后停止,此时摄像头7伴随保护壳6移动到所需位置,并且此时连接杆4侧面的螺纹槽34与螺纹杆12相互平齐。
50.摄像头7调整完高度之后,操作者按压拉杆13,拉杆13挤压螺纹杆12向螺纹槽34的端口处移动,螺纹杆12到达螺纹槽34的端口处之后,操作者旋转拉杆13,拉杆13将带动螺纹杆12向螺纹槽34的内部转动,以此便可限制连接杆4从固定套杆2的内部滑出之后不会下降,进而保证调整高度后的摄像头7能够稳定的进行拍摄取样工作。
51.若需要调整拍摄采样的角度时,操作者握住把手9并施加拉力,把手9带动活动挡板8向上移动,活动挡板8通过连接块33带动保护壳6上升,保护壳6带动支撑杆5上升,支撑杆5带动联动杆27上升,联动杆27带动联动板29沿着空腔28的内部上升,联动板29带动定位杆30向定位槽31的外部移动,同时联动板29还将带动复位弹簧32延伸并蓄力,最后定位杆30将从定位槽31的内部完全滑出,然后操作者对把手9施加旋转力,进而把手9、活动挡板8、
保护壳6、支撑杆5、联动杆27和联动板29将同步转动,联动板29带动定位杆30同步转动,当保护壳6带动摄像头7调整一定角度之后,操作者即可解除把手9的外加力,此时在复位弹簧32的回弹力下,联动板29带动定位杆30重新进入到定位槽31的内部,以此便可对调整角度后的摄像头7进行固定。
52.当遇到阴雨天气时,操作者可握住把手9并施加水平方向的推力,把手9推动活动挡板8,活动挡板8带动滑杆36沿着凹槽35的内部移动,从而活动挡板8向摄像头7的镜头处移动,以此可以遮挡外部的雨水不会滴落在摄像头7的镜头上,保证摄像头7拍照采样的准确性。
53.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1