一种农用作业移动平台的调平机构
:
1.本发明涉及一种农用作业移动平台的调平,属于智能农机装备技术领域。
背景技术:
2.随着科学技术的发展,农机装备智能化程度逐渐提高,采用农用机器人工作代替人工工作已经成为一种趋势,而移动平台是农用机器人工作的基础。农业机器人已经有许多成功的应用,农业机器人与机械化能给现代农业带来巨大的经济效益,有广阔的市场前景,但当前机器人移动平台在大规模应用方面还存在行走不稳定的缺点。农用机器人移动平台的广泛研究与应用,将是降低农业作业成本,提高农业作业效率的一条重要途径,也将是我国发展智慧农业的标志性产品。
技术实现要素:
3.为了解决农用机器人移动平台调平问题,本发明设计了一种农业机器人移动平台。
4.一种农用机器人移动平台,包括移动平台底部的转向机构与驱动机构,平台调平机构,安装平台,所述转向机构采用两个万向轮实现转向;所述驱动机构采用链轮链条带动驱动轮实现移动平台的驱动;所述平台调平机构及安装平台设置在所述移动平台上,采用四个电动推杆驱动,在不平整路面上通过调整电动推杆的伸缩使安装平台始终保持水平状态。
5.所述的驱动机构包括驱动轮,驱动电机,减速机,法兰,主动链轮,从动链轮,链条,销轴,动力传递路线是驱动电机带动链轮链条驱动带动驱动轮实现整车驱动;驱动电机的差速运转带动万向轮的转向;所述驱动电机的输出轴与减速机的输入轴相连,可以降低转速,提高扭矩,驱动电机通过电机支撑座与驱动轮支撑相连,所述减速器与主动链轮通过法兰连接,法兰与主动链轮的连接通过销轴实现,所述驱动轮支撑通过移动平台支柱与平台相连。
6.所述的平台调平机构及安装平台包括电动推杆,电动推杆底座,移动平台支柱,所述电动推杆与车体平台相连,电动推杆底座与移动平台支柱相连,在路面不平整时,可调节四根电动推杆的伸缩使得平台始终保持水平状态。具体调平方式为:通过安装在平台上的倾角传感器感知车体相对于x轴的倾角α和相对y轴的倾角β,通过主控板控制四个电动推杆的升降。
7.该农用机器人移动平台有以下有益效果。
8.本发明中,大多零件采用型材,成本低,经济型好。
9.本发明中,四个支柱上共有四个电动推杆,可通过调整电动推杆的行程长度使得平台始终保持水平状态调节平台行走时的平稳性,电动推杆调平与其他方式调平相比的优点在于推杆可以往复直线运动,线性好,调平精度高,可以使移动平台作业精度提高。
10.本发明中的组件(法兰,销轴),可以在驱动电机电量不足以驱动车体运动时,可通
过取下销轴,隔断动力传输,从而可以使人力推动移动平台移动。
附图说明:
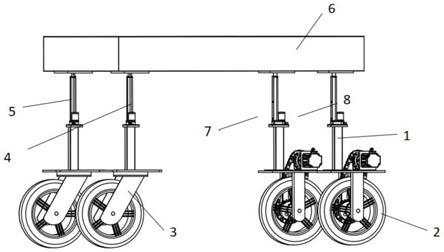
11.图1:本发明中农用作业移动平台的结构示意图。
12.图2:本发明中转向结构示意图。
13.图3:本发明中驱动结构示意图。
14.图4:本发明中移动平台支柱示意图。
15.图5:采摘平台坐标系。
16.附图标记说明:
[0017]1‑
调平装置;2
‑
转向装置;3
‑
驱动装置;4
‑
电动推杆一;5
‑
电动推杆二;6
‑
安装平台;7
‑
电动推杆三;8
‑
电动推杆四;9
‑
驱动轮支撑架;10
‑
从动链轮;11
‑
驱动轮;12
‑
驱动电机;13
‑
电机支撑架;14
‑
减速器;15
‑
减速器支撑架;16
‑
法兰;17
‑
主动链轮;18
‑
销轴;19
‑
链条;20
‑
万向轮;21
‑
转动轮支架总成;22
‑
万向轮转动总成;23
‑
支柱;24
‑
电动推杆底座;25
‑
电动推杆上安装板。
具体实施方式:
[0018]
下面结合附图和实施方式,对本发明作进一步详细阐述。
[0019]
图1所示,一种农用采摘人移动平台,包括平台底部的转向装置2与驱动装置3,平台调平装置1与安装平台6,所述转向装置2通过采用两个万向轮19差速实现转向;所述驱动装置3采用链轮链条带动驱动轮11实现移动平台的驱动;所述车体调平1及安装平台6设置在所述移动平台上,采用四个电动推杆驱动(电动推杆一4,电动推杆二5,电动推杆三7,电动推杆四8),在不平整路面上通过调整电动推杆的伸缩使安装平台6始终保持水平状态。
[0020]
所述的平台调平1及安装平台6包括电动推杆,电动推杆底座24,移动平台支柱23,底座24焊接安装在移动平台支柱23上,在路面不平整时,调整四根电动推杆(电动推杆一4,电动推杆二5,电动推杆三7,电动推杆四8)伸缩从而使得安装平台6始终保持水平状态。具体调平方式为:通过安装在平台上的倾角传感器感知车体相对于x轴的倾角α和相对y轴的倾角β,通过主控板控制四个电动推杆的升降。
[0021]
所述的驱动装置3包括驱动轮11,驱动电机12,减速器14,法兰16,主动链轮17,从动链轮10,链条19,驱动电机12通过减速器14带动主动链轮17转动进而带动从动链轮10的转动,进而带动驱动轮11实现整车驱动;主动链轮17和从动链轮10通过与链条19的啮合传递扭矩;所述驱动电机12通过电机支撑架13与驱动轮支撑架9通过螺钉相连,驱动电机12的输出轴与减速机14的输入轴连接,可以降低转速,提高扭矩,减速机14通过减速机支撑架15与驱动轮支撑9通过螺钉连接,从而提高驱动电机12和减速机14的支撑力,避免驱动电机12在工作过程中产生震动从而对移动平台工作造成影响;驱动电机12与减速机14通过螺钉固定,所述主动链轮17与减速器14通过法兰16连接,法兰16与主动链轮17的连接通过销轴18实现。
[0022]
具体的,销轴18的作用是当驱动电机12在田间工作电量消耗过大,不足以带动车体行进时,此时移动平台驱动扭矩过大,依靠人力不能够使得移动平台在田间移动,所以可以将销轴18取下,从而隔断驱动电机12与主动链轮17之间的动力连接,此时可以通过人力
对移动平台进行移动,所述驱动轮支撑9通过调平机构1与车体平台6相连。
[0023]
所述平台支柱23材料选用矩形钢,与电动推杆底座24通过焊接连接,安装在驱动轮支撑9上,在移动平台工作时可以增大承载力。
[0024]
本发明的工作原理为:
[0025]
移动平台可整体抬高或降低平台主体的高度,也可根据地形条件调整电动推杆结构,以保证平台主体的水平,从而保证以平台为载体的信息采集传感器以及农用机器人移动平台的作业精度。当作业需要调整整体高度时,4个独立的角度传感器感知需要调整的角度,主控板计算需调整的高度,控制4个电动推杆的上升或下降,从而达到4个腿部机构高度的独立调整。
[0026]
假设平台长宽均为a,l为推杆原始长度,采用中心点不动法,以采摘平台建立oxyz直角坐标系,动平台在空间中绕xy轴旋转后得到:
[0027][0028]
动平台坐标系中的支撑点p1,p2,p3,p4坐标为:
[0029][0030]
则推杆相对于中心点上升或下降的长度为:
[0031][0032][0033][0034][0035]
以上所述仅为本发明的较佳实施例而已,显然本发明的实现并不受上述方式的限制,只要采用了本发明的精神和原则之内进行的各种改进,均在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1