仿生交叉鱼骨形连续体机器人机械臂
1.本发明涉及一种连续体机器人的机械臂,具体地说,涉及一种模仿鱼骨结构的仿生交叉鱼骨形连续体机器人机械臂。本发明属于机器人技术领域。
背景技术:
2.传统工业机器人大多为刚性机器人,其机械臂多由多个刚性结构部件串联而成,具有负载能力大、运动精度高、系统响应快以及控制技术成熟等优点,已广泛地应用在汽车装配、物流分拣以及构件焊接等领域。但此类机器人通常工作在宽阔的结构化环境内,其难以适应狭窄复杂的工作环境,如生物体内部、狭长的管道内等。随着近些年新兴的连续体机器人的出现,由于其机械臂具有高度可变形结构特点,理论上具有无限多的自由度,使其能够在复杂的工作环境内工作,特别是能够在狭长复杂的管道空间内自主工作,从而弥补传统工业机器人的不足。
3.连续体机器人机械臂按其布置形式大致分为并联型,串联型和串并混联型,其运动形式为纵向伸出或径向扩张或各向弯曲。例如,公开号为cn205363953u的中国专利公开了一种气动绳控负荷型柔性机械臂,该机械臂主要由多节并联机构串联而成,每个关节由十字万向节连接,能够向多个方向弯曲。公开号为cn108340381b的中国专利公开了一种可伸缩的变尺度连续体机械臂,该机械臂由四根驱动绳索驱动完成各方向弯曲运动,其箱体内有一大型齿轮用来完成机械臂的纵向伸出和收缩运动,此外其关节还可进行一定程度的径向张开。
4.目前,此类连续体机器人机械臂普遍存在的问题是:机械臂在弯曲变形过程中,机械臂的弯曲近似于圆弧状,但是其外侧的驱动绳索则呈直线状,导致在进行机械臂运动学建模时,需构建驱动绳索绳长与机械臂末端位置的对应关系,即若驱动绳索为直线,当改变第一个弯曲单元驱动绳索长度使其弯曲的同时,控制第二单元弯曲的驱动绳索长度也会发生改变,此外在计算直线型驱动绳索绳长时会引入正弦和余弦值,这都将使理论建模的复杂程度增加,并会影响建模精度,从而使得后期机械臂在控制过程中运动精度受到影响。
技术实现要素:
5.鉴于上述原因,本发明的目的是提供一种模仿鱼骨结构的仿生交叉鱼骨形连续体机器人机械臂。该连续体机器人机械臂弯曲变形过程中,其驱动绳索随机械臂一同弯曲成圆弧状,从而大大简化机械臂理论建模的复杂程度,并提高了建模精度,机械臂运动精度高。
6.为实现上述目的,本发明采用以下技术方案:一种仿生交叉鱼骨形连续体机器人机械臂,其包括箱体、柔性机械臂、驱动绳索、驱动电机模块和控制模块;所述柔性机械臂的一端通过螺栓固定在所述箱体上;所述驱动绳索、驱动电机模块和控制模块固定在所述箱体内;所述驱动绳索穿设所述柔性机械臂;所述控制模块通过所述驱动电机模块控制所述驱动绳索驱动所述柔性机械臂动作;
7.所述柔性机械臂由端盖、若干节仿鱼骨基本模块和若干个中间连接盘组合而成,相邻的两节所述仿鱼骨基本模块通过所述中间连接盘交叉串联在一起,所述端盖固定在所述仿鱼骨基本模块的端部;
8.所述仿鱼骨基本模块由刚柔混合的仿生鱼骨架和弹簧钢片构成;
9.所述刚柔混合的仿生鱼骨架由3d打印技术一次性打印成型,其中间为一长条形矩形骨架,该长条形矩形骨架由柔性材料3d打印成型,模仿鱼的脊柱;在所述长条形矩形骨架的内部、贯穿骨架的首尾开有矩形通孔;在所述长条形矩形骨架上,垂直骨架间隔地设有若干片鱼片,该鱼片由刚性材料3d打印成型,模仿鱼的肋骨;所述鱼片为十字形,其各个端部均为圆弧状,其端部周向均布有四组、每组两个用于穿设所述驱动绳索的第一穿线孔;
10.所述弹簧钢片穿设在所述长条形矩形骨架的矩形通孔;该弹簧钢片为一矩形的可弯曲的柔性钢片,其两端中间处各开有一用于插接的矩形开口,其两端的上、下端部分别设有安装孔;
11.当相邻的两节所述仿鱼骨基本模块通过所述中间连接盘串联时,相邻的两块所述弹簧钢片相互垂直叉接。
12.优选地,所述驱动绳索分为上、下、左、右四组,每组包括两根所述驱动绳索,所述驱动绳索分别穿设于构成所述仿生鱼骨基本模块的所述鱼片周向均布的所述第一穿线孔;
13.所述四组驱动绳索对向布置,所述上面一组驱动绳索驱动所述柔性机械臂上仰,所述下面一组驱动绳索驱动所述柔性机械臂下俯,所述左面一组驱动绳索驱动所述柔性机械臂向左弯曲,所述右面一组驱动绳索驱动所述柔性机械臂向右弯曲。
14.优选地,所述柔性机械臂由前后端盖、四节仿鱼骨基本模块和三个中间连接盘组合而成;所述四组、每组两根驱动绳索的长度为一长一短;
15.所述第一组、两根驱动绳索的一端与所述驱动电机模块相连,其中,短的所述驱动绳索的另一端固定在第一个所述中间连接盘上端,长的所述驱动绳索的另一端固定在第三个所述中间连接盘上端,用于控制柔性机械臂上仰;
16.所述第二组、两根驱动绳索的一端与所述驱动电机模块相连,其中,短的所述驱动绳索的另一端固定在第一个所述中间连接盘下端,长的所述驱动绳索的另一端固定在第三个所述中间连接盘下端,用于控制柔性机械臂下俯;
17.所述第三组、两根驱动绳索一端与所述驱动电机模块相连,其中,短的所述驱动绳索的另一端固定在第二个所述中间连接盘左端,长的所述驱动绳索的另一端固定在机械臂活动端所述端盖左端,用于控制柔性机械臂向左弯曲;
18.所述第四组、两根驱动绳索一端与所述驱动电机模块相连,其中,短的所述驱动绳索的另一端固定在所述第二个中间连接盘右端,长的所述驱动绳索的另一端固定在机械臂活动端所述端盖右端,用于控制柔性机械臂的向右弯曲。
19.优选地,所述中间连接盘为十字形,其形状与十字形所述鱼片的形状相同;所述中间连接盘的四个端部,周向均布有四组、每组两个用于穿设所述驱动绳索的第二穿线孔;
20.在所述中间连接盘的前后面中间处,沿所述中间连接盘四个伸出的端臂,开有一个横向矩形插槽和一个纵向矩形插槽;在所述横向矩形插槽和纵向矩形插槽的两端各开有一个用于固定插入的所述弹簧钢板的第一安装孔;
21.在组装柔性机械臂时,将前一节所述仿鱼骨基本模块的弹簧钢片插入所述中间连
接盘前面纵向矩形插槽内,将后一节所述仿鱼骨基本模块旋转90度,将后一节所述仿鱼骨基本模块的弹簧钢片插入同一所述中间连接盘背面横向矩形插槽内;使相邻的两节所述仿鱼骨基本模块交叉串联连接,两者呈90度共同插入连接处的同一所述中间连接盘上,所述前一节仿鱼骨基本模块呈垂直布置实现偏转功能,所述后一节仿鱼骨基本模块呈水平布置实现俯仰功能。
22.优选地,所述端盖为一法兰盘,在所述法兰盘上凸设有十字形架;
23.所述十字形架的形状与十字形所述鱼片的形状相同,所述十字形架的四个端部、周向均布设有四组、每组两个用于穿设驱动绳索的第三穿线孔;在所述十字形架的正面中间处,开有一个用于插固所述弹簧钢板的纵向矩形插槽,在所述矩形插槽的两端各设有一用于固定插入的所述弹簧钢板的第二安装孔;
24.当多节所述防鱼骨基本模块通过所述中间连接盘串联在一起后,将首、尾两节所述仿鱼骨基本模块的弹簧钢片的端部分别插入所述端盖的插槽中,并通过螺栓将所述弹簧钢片与所述端盖固定在一起,组装成一个完整的柔性机械臂。
25.优选地,所述驱动电机模块由八个电机、一个a型电机保持架、一个b型电机保持架、三个c型电机保持架和八个绕线轮组成;
26.所述a型电机保持架为拱形结构,位于整个模块的中部,将整个电机布局空间分成四部分恰好与所述柔性机械臂端盖上的十字分布的四组第三穿线孔相互对应;所述a型电机保持架的底部螺栓连接固定在所述箱体上,其顶部与所述b型电机保持架通过螺栓相连;
27.所述b型电机保持架为m型结构,位于所述a型电机保持架上方,在其顶部设计有两个法兰结构用于安装固定两个所述电机,其底部空间放置有两个所述绕线轮45;
28.所述c型电机保持架为l型结构,三个所述c型电机保持架分别分布在所述a型电机保持架的内部和左右两侧,每个所述c型电机保持架纵向安装固定有两个所述电机和两个所述绕线轮,所述c型电机保持架通过螺栓与所述箱体相连接。
29.优选地,所述控制模块由电源、单片机、分压器、八个电机驱动模块;所述电源经所述分压器分别为八个所述电机提供工作电源,所述单片机的信号输出端通过八个所述电机驱动模块分别控制八个所述电机的运转或停止。
30.优选地,所述控制模块还包括一呈阶梯状的控制器保持架,八个所述电机驱动模块通过螺栓固定在该控制器保持架上;所述电源、单片机和分压器也通过螺栓固定在该控制器保持架上。
31.与现有技术相比,本发明的有益效果如下:
32.本发明利用3d打印技术,采用多硬度材料一次性3d打印成型刚柔混合的仿生鱼骨架,组装成柔性机械臂,实现柔软与刚性的结合,使其结构紧凑,无复杂装配,提高了其结构精度;并用绳驱动机械臂,模拟复杂的肌肉驱动,使机械臂设计精确高,灵活度强;又通过串联方式实现运动解耦从而使得理论模型得以简化,特别地,刚柔混合仿生鱼骨架结构使得驱动绳索弯曲形式更加贴近圆弧形,同理论假设更加贴近,大大简化了理论建模的复杂程度,使得理论模型具有更高的精度,为后续机械臂的运动精度提供了基础,从而在控制过程中可以使得其末端位置更加准确,良好地解决了普通连续体机器人运动误差大的问题。
附图说明
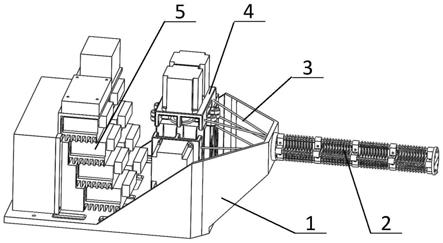
33.图1为本发明仿生交叉鱼骨形连续体机器人机械臂结构示意图;
34.图2为本发明柔性机械臂结构示意图;
35.图3为本发明仿鱼骨基本模块结构示意图;
36.图4为本发明刚柔混合仿生鱼骨架结构示意图;
37.图5为图4所示刚柔混合仿生鱼骨架主视图;
38.图6为本发明弹簧钢片结构示意图;
39.图7为本发明中间连接盘结构示意图;
40.图8为本发明柔性机械臂基本单元结构示意图;
41.图9为本发明柔性机械臂的端盖结构示意图;
42.图10为本发明驱动电机模块结构示意图;
43.图11为本发明缠线轮安装示意图;
44.图12为本发明a型电机保持架结构示意图;
45.图13为本发明b型电机保持架结构示意图;
46.图14为本发明c型电机保持架结构示意图;
47.图15为本发明控制模块结构示意图;
48.图16为本发明控制器保持架结构示意图。
具体实施方式
49.下面通过具体实施例对本发明作进一步详细地描述,其他实施例不在此一一赘述,但本发明的实施方式不限定于以下实施例。
50.为解决传统连续体机器人机械臂理论建模复杂且机械臂控制精度有待提升的问题,本发明受鱼游动时身体摆动姿态以及鱼骨结构的启发,模仿鱼的骨骼特点,研制一种仿生交叉鱼骨形连续体机器人机械臂。如图1所示,包括箱体1、柔性机械臂2、驱动绳索3、驱动电机模块4和控制模块5。柔性机械臂2的一端通过螺栓固定在箱体1上;驱动绳索3、驱动电机模块4和控制模块5固定在箱体1内;驱动绳索3穿设整个柔性机械臂2,其第一端固定在柔性机械臂2的活动端,第二端与驱动电机模块4相连;控制模块5通过驱动电机模块4控制驱动绳索3,进而通过驱动绳索3驱动柔性机械臂2完成俯仰、弯曲、偏转等动作。
51.在本发明较佳实施例中,为使整个机械臂运动更灵活,箱体1为薄壳型箱体,驱动电机模块4安装在箱体内靠近柔性机械臂2一端,控制模块5安装在箱体内远离柔性机械臂2的一端。
52.如图2、图3所示,柔性机械臂2包括端盖21、仿鱼骨基本模块22和中间连接盘23,相邻的两节仿鱼骨基本模块22通过中间连接盘23交叉串联在一起,两端的仿鱼骨基本模块22的端部分别固定一端盖21。柔性机械臂通过其端部的端盖21与箱体1或其他部件相连。
53.如图3
‑
图6所示,仿鱼骨基本模块22包括刚柔混合的仿生鱼骨架221和弹簧钢片222。刚柔混合仿生鱼骨架221由3d打印技术一次性打印成型,其中间为一长条形矩形骨架2211,该长条形矩形骨架2211由例如橡胶、硅胶等柔性材料一次性3d打印成型,模仿鱼的脊柱。在长条形矩形骨架的内部、贯穿骨架的首尾开有矩形通孔22111。在长条形矩形骨架2211上,垂直于骨架间隔地设有若干片鱼片2212,该鱼片2212由例如工程塑料的刚性材料
一次性3d打印成型,模仿鱼的肋骨。该鱼片2212为十字形,其各个端部均为圆弧状,其端部周向均布有四组、每组两个用于穿设驱动绳索3的圆形穿线孔22121。
54.弹簧钢片222穿设在长条形矩形骨架的矩形通孔22111内。弹簧钢片222为一矩形的可弯曲的柔性钢片,其两端中间处各开有一用于插接的矩形开口2221,其两端的上、下端部分别设有安装孔2222。
55.本发明的刚柔混合的仿生鱼骨架221和柔性弹簧钢片222可以使机械臂弯曲时驱动绳索的弯曲形式更加接近圆弧形,从而实现本发明机械臂实际变形与理论假设的高度吻合,动作精准。
56.本发明长条形矩形骨架2211的长度,以及十字形鱼片2212的大小和个数,可根据机械臂工作空间、现场环境而定。在本发明较佳实施例中,长条形骨架2211的长度为50毫米,宽度为26毫米,十字形鱼片2212的外接圆直径为42毫米,每节长条形矩形骨架2211上间隔地设有10片十字形鱼片2212。穿设在长条形矩形骨架内的弹簧钢片222的厚度为1毫米,长度为70毫米,宽度为23毫米。
57.图7为用于连接相邻的两节仿鱼骨基本模块22的中间连接盘23结构示意图。如图所示,中间连接盘23为十字形,其形状与十字形鱼片2212的形状相同,十字形中间连接盘23的四个端部,周向均布有四组、每组两个用于穿设驱动绳索3的穿线孔231。在十字形中间连接盘23的前后面中间处,沿中间连接盘四个伸出的端臂,开有一个横向矩形插槽232和一个纵向矩形插槽233。在横向矩形插槽和纵向矩形插槽的两端各开有一个用于固定插入的弹簧钢板222的安装孔234。
58.在组装柔性机械臂2时,先通过3d打印技术打印出如图4所示的刚柔混合的仿生鱼骨架221,再将图6所示的柔性弹簧钢片222插入仿生鱼骨架的矩形通孔22111内,组装出如图3所示的一节仿鱼骨基本模块22;重复上述步骤,组装出若干节仿鱼骨基本模块22;然后,如图8所示,将第一节仿鱼骨基本模块22的弹簧钢片222插入中间连接盘23前面纵向矩形插槽233内,将第二节仿鱼骨基本模块22旋转90度,将第二节仿鱼骨基本模块22的弹簧钢片222插入中间连接盘23背面横向矩形插槽232内;然后,将固定螺栓穿过中间连接盘23的安装孔234、弹簧钢片222的安装孔2222,将相邻的两节仿鱼骨基本模块22和中间连接盘23连接固定在一起,组成如图8所示的一个柔性机械臂基本单元。构成柔性机械臂基本单元的两节仿鱼骨基本模块22交叉串联连接,两者呈90度共同插入连接处的中间连接盘23上,第一节仿鱼骨基本模块呈垂直布置实现偏转功能,第二节仿鱼骨基本模块呈水平布置实现俯仰功能;重复上述步骤,组成出若干组如图8所示的柔性机械臂基本单元,然后,将再将柔性机械臂基本单元串联形成如图2所示的由若干节仿鱼骨基本模块22构成的柔性机械臂2。
59.图9为固定在柔性机械臂两端的端盖21的结构示意图。如图所示,端盖21包括法兰盘211和凸设在法兰盘211上的十字形架212。法兰盘211上设有用于与箱体1或其它部件相连的安装孔2111。十字形架212的形状与十字形鱼片2212的形状相同,十字形架212的四个端部、周向均布设有四组、每组两个用于穿设驱动绳索3的穿线孔2121。在十字形架212的正面中间处,开有一个用于插固弹簧钢板222的纵向矩形插槽213,在纵向矩形插槽213的两端各设有一用于固定插入的弹簧钢板222的安装孔214。
60.如图2所示,当多节防鱼骨基本模块22通过中间连接盘23串联在一起后,将首、尾两节仿鱼骨基本模块22的弹簧钢片222的端部分别插入一个端盖21的纵向矩形插槽213中,
然后,通过螺栓将弹簧钢片222与端盖21固定在一起,组装成一个完整的柔性机械臂。
61.为实现通过驱动绳索3驱动柔性机械臂2俯仰、弯曲、偏转,构成柔性机械臂的每节仿生鱼骨架周向均布有四组、每组两个用于穿设驱动绳索的穿线孔2212,也就是说,穿设整个柔性机械臂2的驱动绳索最多是八根,为精准地驱动柔性机械臂动作,需要八个电机分别控制八根驱动绳索,为减小箱体1的体积,合理紧凑地布局八个电机,同时又要避免八根驱动绳索相互干扰,如图10
‑
图14所示,本发明驱动电机模块4包括八个电机41、一个a型电机保持架42、一个b型电机保持架43、三个c型电机保持架44和八个绕线轮45。
62.如图12所示,a型电机保持架42为拱形结构,位于驱动电机模块的中部,该结构将整个电机布局空间分成四部分恰好与柔性机械臂端盖21上的十字分布的四组穿线孔相互对应,使得驱动绳索3走线时不会互相干扰。a型电机保持架的底部设有安装孔,可通过螺栓连接固定在箱体1上,其顶部设计有挂耳结构用于与b型电机保持架43相连。
63.如图13所示,b型电机保持架43为m型结构,位于a型电机保持架上方,在其顶部设计有两个法兰结构用于安装固定两个电机41,其底部空间放置有绕线轮45且设计有挂耳结构通过螺栓连接方式与a型电机保持架相连接。
64.如图14所示,c型电机保持架44为l型结构,三个c型电机保持架分别分布在a型电机保持架的内部和左右两侧,每个c型电机保持架纵向安装固定有两个电机41,c型电机保持架通过螺栓与箱体1相连接。
65.绕线轮45为轮毂型结构,其安装形式如图11所示,用于缠绕驱动绳索3,其中心设有扁位孔451用于与电机转轴连接,在扁位孔的下方设有一小孔452,驱动绳索3穿过小孔452缠绕在绕线轮上,绳尾部可连接一个螺母卡在小孔452处以便固定,防止运动过程中驱动绳索脱线。
66.为精准地通过驱动绳索驱动柔性机械臂弯曲、俯仰、偏转,构成柔性机械臂的每节仿生鱼骨架周向均布有四组、每组两个用于穿设驱动绳索的穿线孔,也就是说,穿设整个柔性机械臂的驱动绳索最多可以是八根,结合图1、图2、图10、图11所示,本发明每根驱动绳索3的固定方法相同均为穿过绕线轮上的小孔后缠绕在绕线轮上,其尾部打结连接有一小螺母用于卡在孔口,其头部穿过柔性机械臂端盖21上的一个穿线孔,并继续向前穿过仿生鱼骨架上的穿线孔和中间连接盘的穿线孔最终头部仍采取打结连接螺母方式固定在其最后穿过的中间连接盘上,最长的驱动绳索将固定于末端端盖21上。
67.按照驱动电机布置形式,本发明将驱动绳索分为四组,每组两根分别穿设于机械臂端盖、仿生鱼骨基本模块和中间连接盘周向均布的上、下、左、右四组、每组两个的穿线孔。四组驱动绳索对向布置,上面一组驱动绳索和下面一组驱动绳索驱动柔性机械臂上俯或下仰,左边一组驱动绳索和右边一组驱动绳索驱动柔性机械臂左右弯曲或左右偏转。
68.为更进一步精准地控制柔性机械臂,且是驱动绳索随机械臂的弯曲变形而弯曲变形,本发明将每组驱动绳索的长度设计为一长一短。即,第一组、两根驱动绳索的一端连接在驱动电机模块顶部两台电机的绕线轮上,短的驱动绳索的另一端固定在第一个中间连接盘上端的穿线孔上,长的驱动绳索的另一端固定在第三个中间连接盘上端的穿线孔上,用于控制柔性机械臂向上弯曲运动(即上仰);第二组、两根驱动绳索的一端连接在驱动电机模块中部的两台电机的绕线轮上,短的驱动绳索的另一端固定在第一个中间连接盘下端的穿线孔上,长的驱动绳索的另一端固定在第三个中间连接盘下端的穿线孔上,用于控制柔
性机械臂向下弯曲运动(即下俯);第三组、两根驱动绳索一端连接在驱动电机模块左部的两台电机的绕线轮上,短的驱动绳索的另一端固定在第二个中间连接盘左端穿线孔上,长的驱动绳索的另一端固定在机械臂活动端端盖左端穿线孔上,用于控制柔性机械臂向左弯曲运动;第四组、两根驱动绳索一端连接在驱动电机模块右部的两台电机的绕线轮上,短的驱动绳索的另一端固定在第二个中间连接盘右端穿线孔上,长的驱动绳索的另一端固定在机械臂活动端端盖右端穿线孔上,用于控制柔性机械臂的向右弯曲运动。
69.自然状态下,同一中间连接盘上所固定的两根驱动绳索3保持相同的长度,此时柔性机械臂2整体呈伸直状态。工作时,通过控制任一电机旋转进而带动与之相连的驱动绳索3进一步缠绕在缠线轮上从而使该驱动绳索3伸出长度减小,进而柔性机械臂2向此侧弯曲,由于相邻的两个柔性机械臂基本模块内的弹性钢片呈90度交叉连接,如图8所示,构成的柔性机械臂基本单元可看作串联的呈90度布置的两个转动副,因此当柔性机械臂基本单元足够多时,机械臂末端理论上可达空间任何位置。
70.如图15所示,本发明控制模块5包括电源51、单片机52、分压器53和八个电机驱动模块54。电源51经分压器53分别为八个电机提供工作电源,单片机52的信号输出端通过八个电机驱动模块54分别控制八个电机的运转或停止。为有序整齐的安装固定电机控制器,如图16所示,控制模块5还包括一呈阶梯状的控制器保持架55,八个电机驱动模块54通过螺栓固定在控制器保持架55上;电源51、单片机52和分压器53也通过螺栓固定在控制器保持架上。
71.本发明通过模仿鱼游动时身体摆动的姿态以及鱼的骨架结构特点,通过将多节刚柔混合的仿生鱼骨架交叉、串联在一起构成一完整的柔性机械臂,解决目前连续体机器人机械臂广泛存在的运动耦合度高,理论模型解耦难度大的问题,并通过多材料3d打印技术制造刚柔混合的仿生鱼骨架,使机械臂运动过程中驱动绳索的形变更加接近圆弧形,与常用理论模型假设条件更加吻合,从而提高开环控制下柔性机械臂的运动精度。
72.本发明通过将多节刚柔混合的仿生鱼骨架交叉串联成一完整的柔性机械臂,使整个机械臂结构紧凑,无复杂装配,提高了其结构精度。另外,本发明仿生鱼骨架的中心采用柔性材料3d打印成型模仿鱼的脊柱,代替传统连续体机器人机械臂的铰链关节,使其弯曲更加的灵活;本发明仿生鱼骨架的外部为刚性结构用以模仿鱼的肋骨;并且在仿生鱼骨架柔性的中心部分还穿设了一弹簧钢片,提高鱼骨结构变形的规则性,使柔性机械臂的近圆弧特征明显,有利于理论建模精确以及控制准确。
73.本发明还在柔性机械臂内穿设有若干根驱动绳索,通过牵引驱动绳索驱动柔性机械臂俯仰、弯曲,使得柔性机械臂弯曲时驱动绳索的弯曲形式更加接近圆弧形,从而实现柔性机械臂的实际变形与理论假设的高度吻合。
74.以上所述的实施例仅是对本发明的优选实施方式进行描述,并非对本发明的范围进行限定,在不脱离本发明设计精神的前提下,本领域普通技术人员对本发明的技术方案做出的各种变形和改进,均应落入本发明权利要求书确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1