移动体控制系统以及控制方法与流程
移动体控制系统以及控制方法
1.本技术为于2017年10月12日提交、申请号为201680021466.7、发明名称为“移动体控制系统、控制方法以及存储介质”的中国专利申请的分案申请。所述母案申请的国际申请日为2016年1月20日,国际申请号为pct/jp2016/051617。
技术领域
2.本公开涉及移动体控制系统以及控制方法。
背景技术:
3.最近,已经提出了与人进行口头或非口头交流的机器人,并在将来很可能增多。在人与机器人之间的交流中,有必要为人确保舒适占用的足够个人空间。舒适的个人空间对每人来说是不同的,但是,在人对人的交流中,人们从彼此之间学到了应该保持多少距离和保持舒适。
4.关于与人交流的机器人,例如,下面的专利文献1公开了一种机器人,其基于在交流期间的人的移动距离和面部朝向来计算用于最佳交流动作的参数,并保证交互伙伴可舒适占用的适当个人空间,或调整与伙伴对视的频率。
5.此外,下面的专利文献2公开了一种机器人,其可根据交流目标的对话距离、视线位置、面部表情以及其他感测信息,调整谈话内容的类型、对话距离、或维持目光接触的时间。
6.引用列表
7.专利文献
8.专利文献1:特开2006
‑
247780
9.专利文献2:特开2011
‑
000681
技术实现要素:
10.技术问题
11.然而,随着将来交流机器人的数量设置增加,尚未提出充分考虑到诸如机器人给人带来的压力的心理影响的技术。例如,当机器人与人交流时,预计由于在人之间不会发生的动作(如在机器人突然出现在人们面前并接近他们而惊动人的时候),会使人有压力。即使机器人能够理解人的情绪,机器人不执行人类会执行的有关情绪的适当动作也会成为压力的来源。
12.虽然在上述两个专利文献中都提出了调整与人的距离以确保与人有适当的个人空间的技术,但没有提及关于人的相对角度。例如,即使处于同一距离,机器人也会对人产生不同的心理影响,这取决于机器人是在交流伙伴的前面、斜前方、旁边、还是后面。
13.因此,本公开提出了移动体控制系统、控制方法和存储介质,其中,移动体可以根据交流目标的情绪而移动到适当的角度和距离。
14.问题的解决方案
15.根据本公开,提供了一种移动体控制系统,包括:被配置用来移动的移动单元;测量单元,被配置用来测量与作为交流目标的目标的角度和距离;情绪评估单元,被配置用来评估所述目标的情绪;以及控制单元,其被配置用来根据评估的情绪,控制所述移动单元将所述移动体移动到具有相对于所述目标的适当角度和距离的初始位置。
16.根据本公开,提供了一种控制方法,包括:由测量单元测量与作为交流目标的目标的角度和距离;评估所述目标的情绪;以及根据评估的情绪,由控制单元控制移动单元将移动体移动到具有相对于所述目标的适当角度和距离的初始位置。
17.根据本公开,提供了一种存储介质,其中存储有程序,所述程序使计算机用作:被配置用来移动的移动单元;测量单元,被配置用来测量与作为交流目标的目标的角度和距离;情绪评估单元,被配置用来评估所述目标的情绪;以及控制单元,其被配置用来根据评估的情绪,控制所述移动单元将移动体移动到具有相对于所述目标的适当角度和距离的初始位置。
18.发明的有益效果
19.如上所述,根据本公开,移动体可根据交流目标的情绪而移动到适当的角度和距离。
20.注意,以上所述的效果不一定是限制性的。利用或取代上述效果,在本说明书中所述的任何效果,或从本说明书中可以掌握的其他效果,都有可能被实现
附图说明
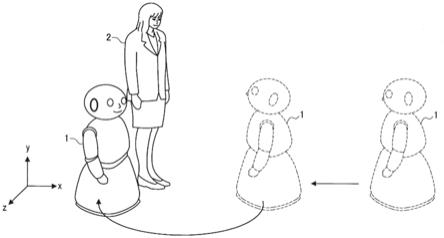
21.图1是用于描绘根据本公开的实施例的移动体控制系统的概要的图;
22.图2是用于描绘根据本公开的对人角度、面对面、以及并排的图;
23.图3是示出根据第一实施例的移动体的配置的示例的框图;
24.图4是示出根据第一实施例的移动控制过程的流程图;
25.图5是示出根据第一实施例的另一个移动控制过程的序列图;
26.图6是用于描绘根据第一实施例的在交流的开始控制移动体的移动的示例的图;
27.图7是用于描绘根据第一实施例的在目标人具有正面情绪的情况下的移动体的移动控制的图;
28.图8是用于描绘根据第一实施例的在目标人处于平常状态的情况下的移动体的移动控制的图;
29.图9是用于描绘根据第一实施例的移动体的移动停止控制的另一个类型的图;
30.图10是用于描绘根据第一实施例的在目标人具有负面情绪的情况下的移动体的移动控制的图;
31.图11是用于描绘根据第一实施例的在目标人具有负面情绪的情况下的移动体的移动控制的图;
32.图12是用于描绘根据第一实施例的修改例的移动体的垂直移动控制的图;
33.图13是用于描绘根据第一实施例的在目标人具有正面情绪的情况下的移动体的对人角度的改变的图;
34.图14是用于描绘根据第一实施例的在目标人具有负面情绪的情况下的移动体的对人角度的改变的图;
35.图15是示出根据第二实施例的移动体的配置的示例的框图;
36.图16是示出根据第二实施例的移动控制过程的流程图;
37.图17是示出根据第二实施例的另一个移动控制过程的序列图;
38.图18是用于描绘根据第二实施例的在交流的开始控制移动体的移动的示例的图;
39.图19是用于描绘根据第二实施例的基于交流历史而控制移动到接近位置的示例的图;
40.图20是用于描绘根据第二实施例的基于交流历史而控制移动到并排位置的示例的图;
41.图21是示出根据第三实施例的移动体的配置的示例的框图;
42.图22是示出根据第三实施例的移动控制过程的流程图;
43.图23是示出根据第三实施例的气氛评估过程的流程图;
44.图24是用于描绘根据第三实施例的在周围气氛不良的情况下控制移动体的移动的示例的图;
45.图25是用于描绘根据第三实施例的在周围气氛良好的情况下控制移动体的移动的示例的图;
46.图26是用于描绘根据第三实施例的在目标人和接近目标人的人之间的气氛极好的情况下控制移动体的移动的示例的图;
47.图27是用于描绘根据第三实施例的周围场所的气氛v、以及移动体和目标人之间的对人距离d之间的关系的示例的图;
48.图28是用于描绘根据第三实施例的基于交流历史的移动控制的示例的图;
49.图29是用于描绘根据第三实施例的基于交流历史的移动控制的示例的图。
具体实施方式
50.下文中参照附图来描述本公开的优选实施例。在本说明书和附图中,具有相同功能和结构的结构元素用相同的附图标记表示,并省略了对这些结构元素的重复解释。
51.将以下面的次序给出描述。
52.1、根据本公开的实施例的移动体控制系统的概要
53.2、实施例
[0054]2‑
1、第一实施例
[0055]2‑
2、第二实施例
[0056]2‑
3、第三实施例
[0057]
3、总结
[0058]
《1、根据本公开的实施例的移动体控制系统的概要》
[0059]
首先,将参照图1来描述根据本公开的实施例的移动体控制系统的概要。如图1所示。例如,根据本实施例的移动体控制系统是通过能够在x轴和z轴上移动的交流机器人实现的、控制移动体1的移动的系统。移动体1包括诸如摄像机和麦克风的各种传感器,基于所拍摄的图像或收集的声音来识别目标人2,并感测目标人2的说话或面部表情。此外,移动体1包括诸如扬声器的输出装置,并能够根据感测的结果,通过利用声音输出、显示输出或移动的响应,来与人进行口头或非口头交流。
[0060]
这里,当交流机器人与人交流时,预计会由于该机器人突然出现在该人的面前并接近该人、或在该人与该机器人不熟悉的状态下进入该人的个人空间,对该人造成压力。另外,由于个人空间对于每个人或人际关系而不同,总是保持相同的距离并不适当。
[0061]
考虑到上述问题,根据本公开的实施例的移动体控制系统通过根据交流目标的情绪而移动到适当角度和距离,而不造成目标人的压力,从而能够进行适当的交流。
[0062]
具体地,如图1所示,移动体1根据作为交流目标的目标人2的情绪而移动到与目标人2适当的对人距离和对人角度。例如,在交流开始时,移动体1在面对目标人2的前方,相对于目标人2而移动到约0到20
°
的对人角度、以及约1米的对人距离。这里,对于考虑到给目标人2造成的心理压力的对人距离,除了个人空间的生物学概念外,还使用了对人距离的社会心理学概念。例如,对人距离的社会心理概念包括:紧密距离(熟悉关系)、个体距离(接近阶段:与亲密伙伴的私人交流;遥远阶段:非正式交流);社会距离(官方沟通),等等。并且,人在对人距离和对人关系不匹配时,会感到压力。例如,当人在拥挤的列车上与不熟悉的人处于紧密距离或个体距离时,会感到压力。在本说明书中,使用约1米的个体距离的遥远阶段、约50厘米的个体距离的接近阶段、以及约30厘米的紧密距离的遥远阶段作为根据对人距离的社会心理学概念的定义的示例,来控制移动体1。因此,在交流开始时,移动体1首先移动到距目标人2约1米的位置,即,个体距离的遥远阶段。
[0063]
基于根据在移动体1中提供的摄像机拍摄的拍摄图像而对面部表情的分析、以及对由麦克风收集的声音的分析,来评估目标人2的情绪。
[0064]
接下来,在移动体1相对于目标人2而移动到具有约0到20
°
的对人角度和约1米的距离的时间点,在目标人2如图1所示微笑、并可被评估为具有正面情绪的情况下,移动体1进一步接近目标人2,并移动到与目标人2并排的位置,以执行更亲密的交流。
[0065]
此外,当移动体1与目标人2并排时,移动体1调整角度,以面对与目标人2相同的方向,以在不对目标人2造成压力的情况下,与目标人2建立更亲密的关系。
[0066]
尽管在图1中示出的示例中,说明了在目标人2具有正面情绪的情况下移动到用于执行与目标人2更亲密的交流的对人距离和对人角度,但本实施例不限于此。例如,在目标人2具有负面情绪的情况下,移动体1与目标人2保持较长的对人距离,以远离目标人2,或者增加与目标人2有关的对人角度,以避免对目标人2造成心理压力。
[0067]
这里,“对人角度”、“面对面”和“并排”的定义将参照图2来描述。图2是用于描绘根据本实施例的对人角度、面对面、以及并排的图。如图2的上部所示,例如,目标ta相对于目标tb的对人角度是从目标ta到目标tb的向量、以及目标ta的前方向量之间的角度ang.a(
‑
180
°
到180
°
)。类似地,目标tb相对于目标ta的对人角度是从目标tb到目标ta的向量、以及目标tb的前方向量之间的角度ang.b(
‑
180
°
到180
°
)。ang.a和ang.b中的每个的绝对值比预定值小,并且,将“ang.a+ang.b”的绝对值是比预定值小的角度的情况定义为“广义上的面对面”,而将对人距离xab进一步比预定距离小(例如,个体距离的遥远阶段:约1米)的情况定义为“面对面”。
[0068]
此外,如图2的下部所示,ang.a和ang.b的绝对值均约为90
°
,且将“ang.a+ang.b”的绝对值是比预定值小的角度的情况定义为“广义上的并排”,而将对人距离xab进一步比预定距离小(例如,个体距离的接近阶段:约50厘米)的情况定义为“并排”。
[0069]
上面描述了根据本公开的实施例的移动体控制系统的概要。移动体1的形状不限
于图1中所示的示例,并且,例如,移动体1可以是两足步行机器人、模仿诸如狗或猫的动物的形状的机器人、或能飞的机器人。此外,除了机器人外,移动体1还可被实现为无人机。接下来,将参照多个实施例来详细描述本公开的移动体控制系统。
[0070]
《2、实施例》
[0071]
<2
‑
1、第一实施例>
[0072]
首先,将参照图3至14来描述根据本公开的第一实施例。
[0073]
(2
‑1‑
1、配置)
[0074]
图3是示出根据第一实施例的移动体的配置的示例的框图。如图3所示,根据第一实施例的移动体1a包括控制单元10
‑
1、通信单元11、距离和角度测量单元12、移动单元13、摄像机14、麦克风15、扬声器16、位置测量单元17、以及对人位置知识数据库(db)18。
[0075]
控制单元10
‑
1由具有中央处理单元(cpu)、只读存储器(rom)、随机存取存储器(ram)和非易失性存储器的微型计算机配置,并控制移动体1a的每个配置。此外,如图3所示,控制单元10
‑
1用作情绪评估单元10a、运动位置计算单元10b和移动控制单元10c。
[0076]
情绪评估单元10a具有评估交流目标的情绪的功能。这里,情绪可为诸如“快乐”或“悲伤”的基本情绪,或可被表示为效价(valence,诱发性)和觉醒(arousal,觉醒度)的二维坐标。更具体地,情绪评估单元10a基于使用摄像机14拍摄的目标人2的面部图像分析面部表情的结果、或使用身体图像分析姿势或移动的结果,使用机器学习方法等来评估情绪。情绪评估单元10a还可使用分析利用麦克风收集的目标人的声音的结果来评估情绪。情绪评估单元10a还可基于目标人2针对于移动体1a的移动的交互(后退、接近等)来评估情绪。情绪评估单元10a评估的情绪可为诸如“快乐”或“悲伤”的基本情绪,或可被表示为效价(诱发性)和觉醒(觉醒度)的二维坐标,如上所述。情绪评估单元10a可根据所评估的特定情绪来评估出正面情绪/负面情绪。
[0077]
移动位置计算单元10b根据由情绪评估单元10a评估的目标人2的情绪来计算移动体1移动的适当位置。具体地,例如,移动位置计算单元10b从对人位置知识db 18获取对应于目标人2的情绪的适当的对人距离和角度,并计算移动体1的移动位置。
[0078]
这里,将用于计算移动体1a应基于目标人2和移动体1a之间的对人距离和对人角度、以及目标人2的情绪而随后移动到的适当位置(对人距离和对人角度)的参数(以下称为对人位置知识数据)存储在对人位置知识db 18中。例如,在目标人2具有正面情绪(诸如安心、好奇、亲密和喜爱的情绪)的情况下的从初始位置的后续移动、在目标人2具有负面情绪(诸如紧张、恐惧和厌恶的情绪)的情况下的从初始位置的后续移动被存储在对人位置知识db 18中。初始位置可根据目标人2的情绪(正/负)而在预定范围内改变。
[0079]
移动控制单元10c控制移动单元13,以将移动体1a移动到由移动位置计算单元10b计算的移动位置。这里,移动控制单元10c参照由距离和角度测量单元12测量的当前对人距离和对人角度来计算到移动位置的移动距离和方向,并对移动单元13执行移动控制。
[0080]
通信单元11具有向和从外部装置发送和接收数据的功能。例如,通信单元11可包括:第一通信单元(所谓的连接端口),其通过有线/无线连接而连接到附近的另一个信息处理装置;以及第二通信单元,其连接到网络,并经由网络上的预定服务器或经由网络而连接到另一个信息处理装置。
[0081]
距离和角度测量单元12具有测量移动体1和目标人2之间的距离(即,对人距离)和
角度(即,对人角度)的功能。例如,距离和角度测量单元12由立体摄像机、使用红外线的距离测量传感器等实现,并测量对人距离。此外,例如,距离和角度测量单元12基于使用所拍摄的目标人2的面部图像分析面部表情的结果而获得目标人2的面部朝向,并计算移动体1a相对于目标人2的前方向量(面部朝向或身体朝向)的对人角度。
[0082]
移动单元13具有移动移动体1的功能,并具体包括移动机构和动力单元。在本实施例中,移动机构和动力单元不被特别限制。
[0083]
摄像机14是拍摄移动体1周围的图像的成像单元,并可包括多个成像单元。尽管摄像机14在移动体1中的安装位置并不被特别限制,但摄像机14可被安装在例如移动体1的胸部、前额部分和颞区。
[0084]
麦克风15是收集周围声音并将周围声音作为语音信号输出到控制单元10
‑
1的收集单元,并可以使用例如麦克风阵列被实现。
[0085]
扬声器16是将预定语音信号转换为语音的语音输出单元,并根据控制单元10
‑
1的控制而输出该语音。例如,可使用具有方向性的扬声器来实现扬声器16。
[0086]
位置测量单元17具有如下功能:根据来自外部的获取信号,测量移动体1a的当前位置。例如,例如,位置测量单元17是使用全球定位系统(gps)定位单元来实现的,从gps卫星接收无线电波,检测移动体1a的位置,并将所检测的位置信息输出到控制单元10
‑
1。此外,除gps之外,位置测量单元还可通过例如经由wi
‑
fi
tm
、蓝牙
tm
等的发送/接收或短距离通信,来检测该位置。
[0087]
上面已经描述了根据本实施例的移动体1a的详细配置。根据本实施例的移动体1a的配置不限于图3中所示的示例,并且,例如,控制单元10
‑
1或对人知识db 18的每个功能的至少一部分可位于云端。在这种情况下,移动体1a可以例如将拍摄的图像发送到云,并接收情绪评估结果。
[0088]
此外,移动体1a可包括各种运动传感器,如加速度传感器、地磁传感器、陀螺仪传感器等,检测有关移动体1a的移动的信息,并在移动单元13的移动控制中使用所检测到的信息。
[0089]
(2
‑1‑
2、操作)
[0090]
图4是示出根据第一实施例的移动控制过程的流程图。如图4所示,首先,移动体1a的控制单元10
‑
1利用距离和角度测量单元12测量移动体1a与交流目标人(目标人2)之间的距离(步骤s103),利用距离和角度测量单元12测量移动体1a与目标人2的对人角度(步骤s106),并利用情绪评估单元10a评估目标人2的情绪(步骤s109)。可基本同时执行步骤s103到s109。
[0091]
接下来,移动体1a的移动位置计算单元10b根据所评估的情绪,参照对人位置知识db 18,计算移动位置(步骤s112)。
[0092]
然后,移动控制单元10c基于与目标人2的当前对人距离和对人角度,计算到所计算的移动位置的移动方向和移动距离(步骤s115)。
[0093]
然后,移动控制单元10c针对移动单元13执行移动控制命令,以移动到到该移动位置(步骤s118)。具体地,移动控制单元10c将到所计算的移动位置的移动方向和移动距离输出到移动单元13,并执行移动命令。这样,移动体1a可根据目标人2的情绪移动到适当距离和角度,并与目标人2进行交流,而不造成目标人2的心理压力。
[0094]
然后,重复步骤s103到s118,直到满足预定结束条件(例如,接收到通过语音或手势的结束命令、时间限制、结束指令等)为止(步骤s121)。
[0095]
上面已经描述了根据本实施例的移动控制过程的示例。然而,本实施例不限于此,例如,在移动体1a的情绪评估单元10a处于云端的预定服务器中的配置(云型移动体控制系统)的情况下,可执行图5所示的操作过程。
[0096]
图5是示出根据第一实施例的另一个移动控制过程的序列图。如图5所示,首先,移动体1a的距离和角度测量单元12测量移动体1a和目标人2之间的距离(步骤s133)。此外,距离和角度测量单元12测量移动体1a相对目标人2的对人角度(步骤s136)。可基本同时执行步骤s133和s136。
[0097]
然后,移动体1a向云上的服务器请求目标人2的情绪评估处理(步骤s139)。这里,移动体1a向服务器传送在情绪评估处理中使用的数据,如目标人2的所拍摄的图像或所收集的语音。
[0098]
接下来,服务器响应于来自移动体1a的请求,分析目标人2的所拍摄的图像或所收集的语音,并评估目标人2的情绪(步骤s142)。然后,服务器将该评估的结果传送到移动体1a(步骤s145)。
[0099]
然后,移动体1a的移动位置计算单元10b基于由服务器评估的目标人2的情绪、以及当前对人距离和对人角度,参照对人位置知识db 18,计算移动位置(步骤s148)。
[0100]
然后,移动控制单元10c基于与目标人2的当前对人距离和对人角度,计算到所计算的移动位置的移动方向和移动距离(步骤s151)。
[0101]
然后,对于移动单元13,移动控制单元10c执行移动控制命令,以移动到该移动位置(步骤s154)。具体地,移动控制单元10c将到所计算的移动位置的移动方向和移动距离输出到移动单元13,并执行移动命令。这样,移动体1a可根据目标人2的情绪而移动到适当的距离和角度,并与目标人2进行交流,而不造成目标人2的心理压力。
[0102]
重复上述步骤s133到s154,直到满足预定结束条件(例如,接收到通过语音或手势的结束命令、时间限制、结束指令等)为止。
[0103]
(2
‑1‑
3、控制移动的示例)
[0104]
关于根据上述本实施例的与目标人2的情绪相对应的移动体1a的适当移动控制,下面将描述控制移动的多个详细示例。
[0105]
(示例1:移动到初始位置)
[0106]
图6是用于描绘根据第一实施例的在交流的开始控制移动体1a的移动的示例的图。如图6所示,首先,在交流开始时,移动体1a从具有相对于目标人2的位置31的默认对人角度ang.1(例如,约10
°
)的面对面移动到对人距离d1(例如,个体距离的遥远阶段:例如约1米)的初始位置32。在对人位置知识db 18中,存储默认对人角度和对人距离。此外,当移动到初始位置时,移动体1a可以根据目标人2的情绪(正面或负面)而在预定范围内调整对人角度和对人距离。
[0107]
(示例2
‑
1:在目标人具有正面情绪的情况下)
[0108]
接下来,参照图7描述当移动体1a移动到初始位置32时、根据目标人2的情绪来控制移动体1a的后续移动位置。图7是用于描绘根据第一实施例的在目标人2具有正面情绪的情况下的移动体1a的移动控制的图。
[0109]
在交流的开始、当移动体1a被移动到初始位置32时目标人2的情绪是正面情绪(例如,目标人2正在微笑)的情况下,如图7的上部所示,移动体1a移动到比初始位置32更接近目标人2的第一接近位置33,以对人距离d2(个体距离的接近阶段:例如,约50厘米)为限。这里,通过保持与目标人2的适当对人角度ang.1,移动体1a接近目标人2,而不造成他们的压力。
[0110]
然后,当移动体1a被移动到第一接近位置33时目标人2的情绪是正面情绪(例如,目标人2正在微笑)的情况下,如图7的下部所示,移动体1a移动到比第一接近位置33更接近于目标人2的第二接近位置34,并通过改变角度而变为与目标人2并排,其中以对人距离d3(接近距离的遥远阶段:例如约30厘米)为限。当移动体1a被布置为与目标人2并排时,移动体1a的角度变为对人角度ang.2,其相对于目标人2的前方向量(前向)接近约90
°
。通过这种方式,移动体1a与目标人2并排,并且面向与目标人2基本相同的方向同,从而增加了亲密度。
[0111]
(示例2
‑
2:移动停止控制)
[0112]
此外,例如,如图7的上部所示,移动体1a在从初始位置移动到第一接近位置33时,可连续评估目标人2的情绪,并且,当目标人2的情绪从微笑转变为正常状态时,可停止移动。如图8所示。在图8的示例中,因为在移动体1a移动到距离目标人2的对人距离d4(d4>d2)的位置35的点时目标人2不再微笑且处于正常状态,所以,移动体1a停止移动,以避免造成目标人2的心理压力。
[0113]
在接近目标人2时,移动体1a还可根据目标人2的预定交互(即,行为)而执行移动停止控制。图9是用于描绘根据当前实施例的移动体的移动停止控制的另一个类型的图。如图9的上部所示,例如,在移动体1a接近目标人2时、目标人2相对于移动体1a后退的情况下,移动体1a停止移动,从而不缩小对人距离。此外,如图9的下部所示,例如,在移动体1a与目标人2面对面的同时接近目标人2时、目标人2看向别处(转移其视线)的情况下,移动体1a停止移动,从而不缩小对人距离。因为通过参照图9描述的目标人2的交互“后退”和“看向别处”均为指示目标人2可能具有负面情绪的行为,所以,移动体1a停止移动,以免造成目标人2的心理压力。
[0114]
(示例2
‑
3:当目标人具有负面情绪时)
[0115]
接下来,将通过参照图10和11来描述在移动体1a被移动到第一接近位置33或第二接近位置34(见图7)时、目标人2具有负面情绪的情况下的移动体1a的移动控制。图10和11是用于描绘根据第一实施例的在目标人2具有负面情绪的情况下的移动体1a的移动控制的图。
[0116]
例如,在当移动体1a从初始位置32移动到第一接近位置33时(见图7的上部)、目标人2的情绪是负面情绪(例如,生气的脸)的情况下,如图10所示,移动体1a相对于目标人2后退,并移动到第一遥远位置36,以对人距离d5(遥远阶段:例如,约1米)为限。这里,移动体1a在保持与目标人2的适当对人角度ang.1的同时,向后移动。这样,移动体1a就可以避免太接近目标人2,并造成目标人2的压力。
[0117]
此外,在当移动体1a从第一接近位置33移动到第二接近位置34时(见图7的下部)、目标人2的情绪是负面情绪(例如,生气的脸)的情况下,如图11所示,移动体1a相对于目标人2后退,并移动到第二遥远位置37,以对人距离d6(遥远阶段:例如,约1米)为限。这里,尽
管移动体1a已在第二接近位置34处呈现角度ang.2用于增加与目标人2的亲密度,但移动体1a将该方向改变为基本面对目标人2的方向,并在保持适当角度ang.1的同时向后移动,以免造成目标人2的压力。这样,移动体1a就可以避免太接近目标人2,并造成目标人2的压力。
[0118]
(示例3:在可垂直移动的移动体的情况下)
[0119]
当移动体1a具有螺旋桨等并可飞行时,因为移动体1a可在垂直方向上移动,所以,移动体1a可通过根据目标人2的视线而调整移动体1a的高度来增加对目标人2的亲密度,或避免造成目标人2的压力。下面,将参照图12详细描述其。.
[0120]
图12是用于描绘根据第一实施例的修改例的移动体1x的垂直移动控制的图。移动体1x是通过使用例如包括螺旋桨等的机器人来实现的,并可飞行。通常,因为处于比伙伴的视线高的位置会给对该伙伴造成压迫感,所以,如图12的左部所示,移动体1x移动到略低于伙伴的视线的位置,并处于该伙伴附近,作为初始位置。这里,对人距离和对人角度(xz位置)是适当的对人距离d1和对人角度ang.1,如图6所示的情况那样。
[0121]
然后,在移动体1x处于初始位置时、目标人2的情绪是正面(例如,微笑)的情况下,移动体1x向上移动,并到达与目标人2的视线等同的高度,如图12的右上部所示,从而提高对目标人2的亲密度。
[0122]
在当移动体1x处于初始位置时、目标人2的情绪是负面(例如,生气的脸)的情况下,移动体1x向下移动,并变为低于目标人2的视线,如图12的右下部所示,从而减小对目标人2的压力。
[0123]
移动体1x在高度方向上的上述垂直移动控制不限于初始位置的情况,并且,也可以根据在移动体1x位于第一和第二接近位置、或第一和第二遥远位置时的目标人2的情绪而被类似执行。例如,在处于第二接近位置34时(见图7的下部),移动体1x在与目标人2的眼睛高度相等的高度上并排,并在处于第一遥远位置36时(见图10),位于比目标人2的眼睛高度低的斜对位置。
[0124]
(示例4:通过改变移动体1a的方向的响应)
[0125]
尽管在上述移动控制示例中,仅描述了根据目标人2的情绪来改变移动体1a的对人距离、或对人距离和对人角度的控制,但本实施例不限于此,且例如,可仅改变移动体1a的对人角度。下面,将参照图13和14来描述示例。
[0126]
图13是用于描绘根据第一实施例的在目标人2具有正面情绪的情况下的移动体1a的对人角度的改变的图。例如,在当移动体1a处于对人角度ang.3而与目标人2面对面时、目标人2微笑的情况下,如图13的上部所示,移动体1a改变方向,以减小对人角度的绝对值,例如,在对人角度ang.4(ang.4<ang.3)下面对目标人2,从而进一步提高对目标人2的亲密度。
[0127]
在当移动体1a处于对人角度ang.5而与目标人2并排时、目标人2微笑的情况下,如图13的下部所示,移动体1a改变方向,以减小对人角度的绝对值,例如,在对人角度ang.6(ang.6<ang.5)下面朝目标人2的方向,从而进一步提高对目标人2的亲密度。
[0128]
图14是用于描绘根据第一实施例的在目标人2具有负面情绪的情况下的移动体1a的对人角度的改变的图。例如,在当移动体1a处于对人角度ang.3而与目标人2面对面时、目标人2具有生气的脸的情况下,如图14的上部所示,移动体1a改变方向,以增大对人角度的绝对值,例如,在对人角度ang.7(ang.7>ang.3)下面对目标人2,以便不造成目标人2的心理压力。
[0129]
在当移动体1a处于对人角度ang.5而与目标人2并排时、目标人2具有生气的脸的情况下,如图14的下部所示,移动体1a改变方向,以增大对人角度的绝对值,例如,将其视线从目标人2转移到对人角度ang.8(ang.8>ang.5)下面对目标人2,以便不造成目标人2的心理压力。
[0130]
<2
‑
2、第二实施例>
[0131]
接下来,将参照图15至20来描述根据本公开的第二实施例的移动体控制系统。在第二实施例中,移动体1b使用在过去与交流目标人2交流时的历史信息,移动到更适当的位置,因此,与目标人2交流而不造成目标人2的不必要的压力。
[0132]
(2
‑2‑
1、配置)
[0133]
图15是示出根据第二实施例的移动体1b的配置的示例的框图。如图15所示,根据本实施例的移动体1b包括控制单元10
‑
2、通信单元11、距离和角度测量单元12、移动单元13、摄像机14、麦克风15、扬声器16、位置测量单元17、对人位置知识db 18、个体信息db 19、以及交流历史存储单元20。
[0134]
控制单元10
‑
2由具有cpu、rom、ram和非易失性存储器的微型计算机构成,并控制移动体1b的每个配置。此外,如图15所示,控制单元10
‑
2用作情绪评估单元10a、移动位置计算单元10b、移动控制单元10c和个体识别单元10d。
[0135]
个体识别单元10d执行交流伙伴(本实施例中的目标人2)的个体识别。例如,个体识别单元10d基于通过摄像机14拍摄的目标人2的拍摄图像的面部识别结果,通过参照个体信息db 19来获取目标人2的个体id。这里,用于个体识别的诸如交流伙伴的面部特征量或语音特征量、以及有关个体的信息(例如,个体id、姓名、年龄、性别、爱好和偏好等)被存储在个体信息db 19中。
[0136]
移动位置计算单元10b基于由情绪评估单元10a评估的目标人2的当前情绪、以及根据个体识别单元10d识别的目标人2的个体id而从交流历史存储单元20获取的目标人2的交流历史,计算适当的移动位置。在此,存储在交流历史存储单元20中的数据结构包括时间戳、目标1(图2中示出的目标ta)、目标2(图2中示出的目标tb)、距离(目标1与目标2之间的距离:xab)、角度1(图2中示出的ang.a)、角度2(图2中示出的ang.b)、情绪1(目标ta的情绪)、以及情绪2(目标tb的情绪。例如,时间戳被表示为unix
tm
时间,目标被表示为十六进制id,距离被表示为厘米,角度被表示为度,并且,情绪被表示为效价和觉醒的值,其被正规化为
“‑
1到1”。在交流历史存储单元20中的数据的示例被示出在下面的表1中。
[0137]
(表1)
[0138]
时间戳目标1目标2距离角度1角度2情绪1情绪21421879415c717eb3c4e14d94c128.623.77.60.7,0.2
‑
0.4,0.1
……………………
1421877811065b61078e6a8451201.487.4
‑
92.50.3,0.4
‑
0.1,
‑
0.3
……………………
[0139]
在本实施例中,更具体地,在交流历史存储单元20中存储时间戳、目标人2的id、移动体1b的id,距离(目标人2和移动体1b之间的对人距离)和角度(目标人2和移动体1b之间的对人角度)。移动位置计算单元10b基于目标人2的个体id和移动体1b的个体id而从交流历史存储单元20获取匹配数据、或多个匹配数据的平均值数据,并在计算移动位置时使用
所获取的数据。
[0140]
当未从交流历史存储单元20获取目标人2的历史信息时,移动位置计算单元10b还可参照对人位置知识db 18,计算与相对于目标人2的当前对人距离和对人角度及目标人2的情绪相对应的适当位置和对人角度。
[0141]
上文详细描述了根据本实施例的移动体1b的配置。这里,与参照图3所述的第一实施例的移动体1a相同的配置的描述将被省略。根据第二实施例的移动体1b的配置不限于图15中所示的配置,且例如,情绪评估单元10a、个体识别单元10d、个体信息db 19和交流历史存储单元20中的至少一个可位于云上。
[0142]
(2
‑2‑
2、操作)
[0143]
接下来,将参照图16来描述根据第二实施例的移动体控制系统的操作过程。图16是示出根据第二实施例的移动控制过程的流程图。如图16所示,首先,移动体1b的控制单元10
‑
2通过个体识别单元10d执行交流目标(目标人2)的个体识别(步骤s203)。另外,控制单元10
‑
2通过距离和角度测量单元12来测量与目标人2的对人距离(步骤s206),测量对人角度(步骤s209),通过情绪评估单元10a评估目标人2的情绪(步骤s212)。可基本上同时执行步骤s203到s212。
[0144]
然后,移动体1b的移动位置计算单元10b基于所识别的目标人2的个体id,从交流历史存储单元20获取目标人2和移动体1b之间的交流历史(步骤s215)。
[0145]
然后,移动位置计算单元10b基于所获取的交流历史来计算移动位置(步骤s218)。例如,在交流的开始,移动位置计算单元10b基于所获取的与目标人2的交流历史而计算初始位置。在当移动体1b处于初始位置时、目标人2的情绪是正面的情况,移动位置计算单元10b基于与目标人2的交流历史,确定移动体1b是否进一步接近目标人2。例如,在基于过去的交流历史、当移动体1b比当前对人距离更接近目标人2时目标人2的情绪是正面的情况下,移动位置计算单元10b计算出比当前位置更接近目标人2的位置,作为移动位置。
[0146]
然后,基于当前与目标人2的对人距离和对人角度,移动控制单元10c计算到在步骤s218中由移动位置计算单元10b计算出的移动位置的移动方向和移动距离(步骤s221)。
[0147]
然后,对于移动单元13,移动控制单元10c执行移动控制命令,以移动到该移动位置(步骤s224)。
[0148]
然后,控制单元10
‑
2控制将移动之后的对人距离、对人角度、以及目标人2的情绪连同时间戳一起存储在交流历史存储单元20中,作为交流历史(步骤s227)。
[0149]
然后,重复步骤s203到s227,直到满足预定结束条件(例如,接收到通过语音或手势的结束命令、时间限制、结束指令等)为止(步骤s230)。
[0150]
上面已经描述了根据本实施例的移动控制过程的示例。然而,本实施例不限于此,且例如,在移动体1b的情绪评估单元10a、个体识别单元10d、对人位置知识db 18处于云端的预定服务器中的配置(云型移动体控制系统)的情况下,可执行图17所示的操作过程。
[0151]
图17是示出根据第二实施例的另一个移动控制过程的序列图。如图17所示,首先,移动体1b的控制单元10
‑
2向云上的个体识别服务器请求个体识别(步骤s243)。这里,移动体1b向个体识别服务器发送用于个体识别处理的数据,如目标人2的所拍摄的图像或所收集的声音。
[0152]
接下来,个体识别服务器响应于来自移动体1b的请求而分析目标人2的所拍摄的
图像或所收集的声音,并执行个体识别(步骤s246)。然后,个体识别服务器将识别的结果发送到移动体1b(步骤s249)。
[0153]
然后,通过距离和角度测量单元12,移动体1b测量移动体1b和目标人2之间的对人距离(步骤s252),并测量对人角度(步骤s255)。可基本同时执行步骤s252和s255。
[0154]
然后,移动体1b向云上的情绪评估服务器请求目标人2的情绪评估处理(步骤s258)。这里,移动体1b向该服务器发送用于情绪评估处理的数据,如目标人2的所拍摄的图像或所收集的声音。
[0155]
接下来,情绪评估服务器响应于移动体1b的请求而分析目标人2的所拍摄的图像或所收集的声音,并评估目标人2的情绪(步骤s261)。然后,情绪评估服务器将该评估的结果发送给移动体1b(步骤s264)。
[0156]
然后,移动体1b的移动位置计算单元10b基于由个体识别服务器识别的目标人2的个体id,从交流历史存储单元20获取目标人2和移动体1b之间的交流历史(步骤s267)。
[0157]
然后,在无法获取目标人2的交流历史(步骤s270/是)的情况下,移动体1b向云上的对人位置知识db服务器请求对人位置知识数据(步骤s273)。
[0158]
然后,对人位置知识db服务器响应于来自移动体1b的请求而搜索对人位置知识数据(步骤s276),并将搜索的结果发送到移动体1b(步骤s279)。
[0159]
然后,移动体1b的移动位置计算单元10b基于所评估的目标人2的情绪、以及当前对人距离和对人角度,参照所获取的交流历史或对人位置知识数据,计算移动位置(步骤s282)。
[0160]
然后,移动体1b的移动控制单元10c基于与目标人2的当前对人距离和对人角度,计算到所计算的移动位置的移动方向和移动距离(步骤s285)。
[0161]
然后,对于移动单元13,移动控制单元10c执行移动控制命令,以移动到该移动位置(步骤s288)。这样,当可获得目标人2的交流历史时,移动体1b可基于与目标人2的过去的交流历史,移动到适当的距离和角度,并可与目标人2交流,而不造成目标人2的心理压力。
[0162]
然后,控制单元10
‑
2控制将对人距离、对人角度、以及目标人2的情绪连同时间戳一起存储在交流历史存储单元20中,作为交流历史(步骤s291)。
[0163]
然后,重复步骤s243到s288,直到满足预定结束条件(例如,接收到通过语音或手势的结束命令、时间限制、结束指令等)为止。
[0164]
(2
‑2‑
3、控制移动的示例)
[0165]
关于根据上述第二实施例的基于与目标人2的交流历史的移动体1b的适当移动控制,下面将描述控制移动的多个详细示例。
[0166]
(示例1:移动到初始位置)
[0167]
图18是用于描绘根据第二实施例的在交流的开始控制移动体1b的移动的示例的图。在交流的开始,移动体1b基于目标人2的交流历史,计算对伙伴无压力的适当初始位置,并移动。
[0168]
例如,当移动体1b与目标人2过去有良好关系(例如,笑脸、正面情绪)、且与目标人2的距离近或与目标人2并排时,如图18的上部所示,移动图1b移动到具有适当的对人角度ang.1的初始位置38,以接近目标人2的对人距离d7(接近阶段:例如,约50厘米)为限。这样,当过去的交流历史良好时,移动体1b从开始移动到接近目标人2的场所。
[0169]
另一方面,当移动体1b与目标人2过去有不良关系(例如,生气的脸、负面情绪)、且与目标人2的距离远时,如图18的下部所示,移动图1b移动到具有适当的对人角度ang.1的初始位置39,以远离目标人2的对人距离d5(遥远阶段:例如,约1米)为限。这样,当过去的交流历史不良时,移动体1b在交流开始移动到远离目标人2的场所。
[0170]
(示例2:到接近位置的移动控制)
[0171]
接下来,在目标人2当移动体1b处于移动位置(例如,初始位置)时微笑(即,具有正面情绪)的情况下,移动体1b执行到比当前位置更接近目标人2的接近位置的运动控制。这里,在本实施例中,当从交流历史存储单元20获取当移动体1b移动到比当前对人距离更近的与目标人2的距离时目标人2的过去情绪,并且,基于过去的情形而确定是否移动到接近位置。下面,将参照图19来详细对其进行描述。
[0172]
例如,如图19的上部所示,在移动体1b在过去接近伙伴时与该伙伴具有良好关系的情况下(即,即使在移动体1b接近时,该伙伴也具有正面情绪),移动体1b控制从具有对人距离d7的当前位置40移动到具有对人距离d8(接近阶段:例如,约50厘米)的接近位置41。在此,对人角度采用存储在对人位置知识db 18中的预定的适当角度ang.1、或基于交流历史计算的与伙伴关系良好的角度。
[0173]
如图19的下部所示,在移动体1b在过去接近伙伴时与该伙伴具有不良关系时(即,在移动体1b接近时,该伙伴具有负面情绪),即便目标人2当前在微笑(即,具有正面情绪),移动体1b也控制不接近目标人2,并在具有对人距离d7的当前位置40停止。这里,对人角度采用存储在对人位置知识db 18中的预定的适当角度ang.1、或基于交流历史计算的与伙伴关系良好的角度。
[0174]
如上所述,当通过参照与目标人2的过去交流历史而评估出目标人2的当前情绪是正面情绪时,移动体1b可适当确定是否进一步接近目标人2,并且更可靠地避免造成目标人2的压力。
[0175]
(示例3:到并排位置的移动控制)
[0176]
然后,在当移动体1b处于移动位置(例如,接近位置)时目标人2微笑(即,具有正面情绪)的情况下,移动体1b执行到比当前位置更接近目标人2的接近位置的运动控制,并与目标人2并排。这里,在本实施例中,从交流历史存储单元20获取当移动体1b处于比当前对人距离近的距离(例如,紧密位置)时的目标人的过去情绪,并基于过去情形而确定是否移动到接近位置。下面,将参照图20详细对其进行描述。.
[0177]
例如,如图20的上部所示,在当移动体1b在过去接近伙伴且与该伙伴并排时与该伙伴具有良好关系(即,该伙伴具有正面情绪)的情况下,移动体1b控制从当前位置42移动到具有对人距离d9(紧密距离:例如,约30厘米)的紧密位置43。在此,对人角度采用存储在对人位置知识db 18中的预定的适当并排角度ang.2、或基于交流历史计算的与伙伴关系良好的角度。
[0178]
如图20的下部所示,在当移动体1b在过去接近伙伴且变为与该伙伴并排时与该伙伴具有不良关系(即,该伙伴具有负面情绪)的情况下,即便目标人2当前在微笑(即,具有正面情绪),移动体1b也控制不接近目标人2和与目标人2变为并排,并在具有对人距离d10(接近阶段:例如,约50厘米)的当前位置42处停止。在此,对人角度采用存储在对人位置知识db 18中的预定的适当角度ang.1,其是基于交流历史计算的,在其上与该伙伴关系良好。
[0179]
如上所述,当通过参照与目标人2的过去交流历史而评估出目标人2的当前情绪是正面情绪时,移动体1b可适当确定是否进一步接近目标人2并变为与目标人2并排,并且,更可靠地避免造成目标人2的压力。
[0180]
<2
‑
3、第三实施例>
[0181]
接下来,将参照图21至29来描述根据本公开的第三实施例的移动体控制系统。在本实施例中,除了目标人2的情绪之外,移动体1c还通过基于目标人2周围存在的人的情绪来评估周围气氛,移动到更适当的位置,从而与目标人2交流,而不造成目标人2或周围人的压力。
[0182]
(2
‑3‑
1、配置)
[0183]
图21是示出根据第三实施例的移动体1c的配置的示例的框图。如图21所示,根据本实施例的移动体1c包括控制单元10
‑
3、通信单元11、距离和角度测量单元12、移动单元13、摄像机14、麦克风15、扬声器16、位置测量单元17、对人位置知识db 18、个体信息db 19、以及交流历史存储单元20。
[0184]
控制单元10
‑
3由具有cpu、rom、ram和非易失性存储器的微型计算机构成,并控制移动体1c的每个配置。此外,如图21所示,控制单元10
‑
3用作情绪评估单元10a、移动位置计算单元10b、移动控制单元10c、个体识别单元10d、以及气氛评估单元10e。
[0185]
气氛评估单元10e具有评估目标人2的周围气氛的功能。例如,气氛评估单元10e基于情绪评估单元10a评估的目标人2周围的人的情绪,评估周围气氛(气氛良好/不良)。此外,在基于周围的人的情绪来评估周围气氛时,气氛评估单元10e可通过参照目标人2和周围的人之间的距离,更准确地评估周围的气氛。
[0186]
更具体地,气氛评估单元10e可以计算在目标人2周围的人的情绪总和,作为周围气氛。当人的情绪是用效价和觉醒来表达的时候,可以使用下面的等式1来计算周围气氛,其中由于距离d(目标人2与周围人之间的距离,或多个周围人之间的距离)导致的影响被加到对正规化的效价v和觉醒a。
[0187]
(等式1)
[0188][0189][0190]
还可进一步通过添加场所和情形(公共场所、住宅、公司、学校、会议中、聚会,等等)来计算周围气氛。
[0191]
移动位置计算单元10b基于由情绪评估单元10a评估的目标人2的情绪、以及由气氛评估单元10e评估的目标人2的周围气氛,计算适当的移动位置。除了目标人2当前的情绪和周围的气氛,当个体识别单元10d能够进行目标人2的个体识别时,移动位置计算单元10b可基于从交流历史存储单元20获取的目标人2和移动体1c之间的交流历史来计算适当的移动位置。根据本实施例的交流历史存储单元20具有数据结构,除了时间戳、目标1、目标2、距离、角度1、角度2、情绪1和情绪2之外,其还包括气氛信息。
[0192]
上面已详细描述了根据本实施例的移动体1c的配置。这里,将省略与根据参照图3
和15描述的第一和第二实施例的移动体1a和1b相同的配置。根据第三实施例的移动体1c的配置不局限于图21中所示的配置,且例如,情绪评估单元10a、个体识别单元10d、气氛评估单元10e、个体信息db 19和交流历史存储单元20中的至少一个可位于云上。
[0193]
(2
‑3‑
2、操作)
[0194]
接下来,将参照图22来描述根据第三实施例的移动体控制系统的操作过程。图22是示出根据第三实施例的移动控制过程的流程图。如图22所示,首先,移动体1c的控制单元10
‑
3通过个体识别单元10d执行交流目标(目标人2)的个体识别(步骤s303)。另外,控制单元10
‑
3通过距离和角度测量单元12来测量与目标人2的对人距离(步骤s306),测量对人角度(步骤s309),并通过情绪评估单元10a评估目标人2的情绪(步骤s312)。并且,控制单元10
‑
3通过气氛评估单元10e评估目标人2的周围气氛(步骤s315)。将参照图23来描述气氛评估过程。可基本上同时执行步骤s303到s315。
[0195]
然后,在目标人2可被识别时,移动体1b的移动位置计算单元10b基于所识别的目标人2的个体id,从交流历史存储单元20获取目标人2和移动体1b之间的交流历史(步骤s318)。
[0196]
然后,移动位置计算单元10b基于所评估的当前气氛来计算移动位置(步骤s321)。这里,移动位置计算单元10b通过参考对人位置知识db 18,基于与预先注册的周围气氛相对应的移动控制数据,来计算运动位置。当可通过步骤s318获得交流历史时,移动位置计算单元10b还可参照交流历史来计算移动位置。例如,参照对人位置知识db 18,即使在目标人2当前微笑和具有正面情绪的情况下,当目标人2的周围气氛不良时(当目标人2周围的多人具有负面情绪时),移动位置计算单元10b计算从目标人2后退的位置,作为移动位置,或不计算移动位置,从而不从当前位置移动。另一方面,当在目标人2当前微笑和具有正面情绪的情况下、目标人2的周围气氛良好时(当目标人2周围的多人具有正面情绪时),移动位置计算单元10b计算比当前位置更接近目标人2的位置,作为移动位置。这样,根据本实施例的移动体1c可以计算与目标人2周围的气氛是良好还是不良相对应的移动位置。由此,移动体1c可以避免例如当在气氛不良的情形中在目标人2附近或与目标人2紧密接触而交流时、导致目标人2或周围人压力的行为。
[0197]
然后,基于当前与目标人2的对人距离和对人角度,移动控制单元10c计算到在步骤s321中由移动位置计算单元10b计算出的移动位置的移动方向和移动距离(步骤s324)。
[0198]
然后,对于移动单元13,移动控制单元10c执行移动控制命令,以移动到该移动位置(步骤s327)。
[0199]
然后,控制单元10
‑
3控制将移动之后的对人距离、对人角度、目标人2的情绪、以及与周围气氛有关的信息连同时间戳一起存储在交流历史存储单元20中,作为交流历史(步骤s330)。
[0200]
然后,重复步骤s303到s330,直到满足预定结束条件(例如,接收到通过语音或手势的结束命令、时间限制、结束指令等)为止(步骤s333)。
[0201]
上面已经描述了根据本实施例的移动控制过程的示例。接下来,将参照图23详细描述步骤s315中的气氛评估过程。
[0202]
图23是示出根据本实施例的气氛评估过程的流程图。如图23所示,首先,移动体1c获取关于在目标人2周围的人的信息(步骤s343)。具体地,移动体1c通过在移动体1c中提供
的各种传感器(距离和角度测量单元12、摄像机14、麦克风15)获取目标人2周围的人的所拍摄的图像、收集的声音、距离测量信息等。
[0203]
然后,距离和角度测量单元12测量目标人2与周围人之间的距离(步骤s346)。例如,距离和角度测量单元12可使用三角测量计算目标人2和周围人之间的距离。
[0204]
然后,情绪评估单元10a根据所获得的拍摄图像或所收集的声音来评估周围人的情绪(步骤s349)。
[0205]
然后,气氛评估单元10e基于评估的周围人的情绪、以及和周围人与目标人2之间的距离来评估周围气氛,并更新气氛值(例如,正面/负面情绪的总值)(步骤s352)。
[0206]
然后,重复步骤s346至s352,直到完成了目标人2周围所有人的分析为止(步骤s355)。
[0207]
如上所述,在本实施例中,根据目标人2的周围人的情绪、以及目标人2与周围人(即大气评估)的距离,计算周围气氛值。
[0208]
(2
‑2‑
3、控制移动的示例)
[0209]
接下来,关于第三实施例的根据周围气氛的移动体1c的移动控制,下面将描述控制移动的多个详细示例。
[0210]
(示例1:使用对人位置知识db 18控制移动的示例)
[0211]
移动体1c的移动位置计算单元10b可基于所评估的周围气氛,参照对人位置知识db 18来计算移动位置。下面,将参照图24至26来描述存储在对人位置知识db 18中的移动控制内容。
[0212]
图24是用于描绘在周围气氛不良的情况下控制移动体1c的移动的示例的图。如图24所示,即使目标人2微笑并有正面情绪,当基于目标人周围的人3a到3d的情绪的周围场所p1的气氛被评估为不良时,移动体1c控制不接近目标人2。例如,移动体1c维持个体距离的遥远阶段(约1米),并采用不会给伙伴造成压力的预定角度ang.1,作为对人角度。可以通过将由于从周围的人3a到3d到目标人2的距离(距离m1到m4)造成的影响加到周围的人3a到3d的情绪,来计算周围场所p1的气氛。在周围场所p1的气氛被评估为不良的情况下,例如,假定v在周围人的情绪(效价)之和中低于负的预定值。
[0213]
图25是用于描绘在周围气氛良好的情况下控制移动体1c的移动的示例的图。如图25所示,当基于目标人周围的人3a到3d的情绪的周围场所p2的气氛被评估为良好时,移动体1c控制接近目标人2。例如,移动体1c接近目标人2,并形成与目标人2的亲密关系。例如,移动体1c维持个体距离的接近阶段(约50厘米),并采用不会给伙伴造成压力的预定角度ang.1,作为对人角度。当目标人2微笑且周围气氛良好时,即使移动体1c处于距目标人2约50厘米,移动体1c也进一步接近目标人2,接近目标人2并变为与目标人2并排,以紧密距离的遥远阶段(约30厘米)为限,并执行与目标人2的亲密交流。可通过将由于从周围的人3a到3d到目标人2的距离(距离m1到m4)造成的影响加到周围的人3a到3d的情绪,来计算周围场所p2的气氛。在周围场所p1的气氛被评估为良好的情况下,例如,在周围人的情绪(效价)之和中,假定v等于或大于正的第一阈值,且低于正的第二阈值。
[0214]
图26是用于描绘在目标人2和接近目标人2的人之间的气氛极好的情况下控制移动体1c的移动的示例的图。如图26所示,即使目标人2微笑并有正面情绪,当目标人2和与目标人2接近的人3a之间的气氛被评估为极好气氛时(即,亲密气氛),移动体1c也控制不接近
目标人2。例如,移动体1c维持个体距离的接近阶段(约50厘米),并采用不会给伙伴造成压力的预定角度ang.1,作为对人角度。在极好的气氛中,例如,假定v在周围人的情绪(效价)之和中等于或大于正的第二阈值。如图26所示,因为目标人2和接近目标人2的人3a之间的距离m5很小,如上面的等式1所示,由距离平方计算的“周围人的情绪(效价)”变为极大,并假定超过了第二阈值。
[0215]
图27中示出了周围场所的气氛v、以及移动体1c与目标人2之间的对人距离d之间的上述关系。图27是用于描绘周围场所的气氛v、以及移动体和目标人之间的对人距离d之间的关系的示例的图。
[0216]
如图27所示,当该场所的气氛v低于负的预定值(此处,与第一阈值相同)(即,气氛不良),移动体1c控制不接近目标人2。当该场所的气氛v等于或大于正的第一阈值且低于正的第二阈值时(即,气氛良好),移动体1c控制接近目标人2,并执行与目标人2的亲密交流。当该场所的气氛v等于或大于正的第二阈值时(即,气氛极好且亲密),移动体1c控制不接近目标人2。
[0217]
这样,除了目标人2的情绪之外,通过根据场所的气氛来调整与目标人2的对人距离和对人角度,移动体1c不会对伙伴或周围造成压力。
[0218]
(示例2:使用交流历史存储单元20来控制移动的示例)
[0219]
虽然在上述示例中,根据在对人位置知识db 18中预先存储的移动控制内容、按照伙伴的情绪或场所的气氛(周围人的情绪的总值)来执行移动控制,但本实施例不限于此。例如,可基于与存储在交流历史存储单元20中的与目标人2的交流历史来执行更适当的移动控制。下面,将参照图28和29来对其进行详细描述。
[0220]
图28是用于描绘根据本实施例的基于交流历史的移动控制的示例的图。将在图28中描述:当目标人2微笑、且场所p4的气氛良好时(周围人脸上也有微笑、且有正面情绪)时的移动体1c的移动控制。移动体1c向交流历史存储单元20查询:在目标人2微笑且周围气氛也良好的情形中,当移动体1c接近到比当前点更靠近目标人2时,目标人2的情绪或周围气氛。如果当移动体1c在过去的相同情形中接近目标人2时、目标人2的情绪是正面的,则如图28的上部所示,移动体1c控制移动,以比当前位置更接近目标人2。另一方面,如果当移动体1c在与过去相同的情形下接近目标人2时、目标人2的情绪是负面的,则如图28的下部所示,移动体1c可控制即使在目标人2当前微笑且周围气氛良好时也不接近目标人2,因此不造成目标人2的压力。
[0221]
图29是用于描绘根据本实施例的基于交流历史的移动控制的示例的图。将在图29中描述:当目标人2微笑、且场所p5的气氛不良时(周围人具有生气的脸、且有负面情绪)时的移动体1c的移动控制。移动体1c向交流历史存储单元20查询:在目标人2微笑且周围气氛不良的情形中,当移动体1c接近到比当前点更靠近目标人2时,目标人2的情绪或周围气氛。如果当移动体1c在过去的相同情形中接近目标人2时、目标人2的情绪是负面的,则如图29的上部所示,移动体1c控制移动,以便不比当前位置更接近目标人2,因此不造成目标人2的压力。另一方面,如果当移动体1c在与过去相同的情形下接近目标人2时、目标人2的情绪是正面的,则如图29的下部所示,即使在周围气氛不良时,移动体1c也可控制移动以接近目标人2。
[0222]
《3、总结》
[0223]
如上所述,在根据本公开的实施例的移动体控制系统中,移动体1根据作为交流目标的目标人2的情绪而移动到适当的对人距离和对人角度,使得移动体1不给目标人2造成心理压力,并与目标人2进行舒适的交流。
[0224]
当与目标人2的交流历史被积累时,通过参照交流历史,移动体1可以移动到更合适的位置,并且可以与目标人2进行舒适的交流,而不造成目标人2的心理压力。
[0225]
通过基于目标人2的周围人的情绪而考虑到场所的气氛,移动体1可移动到更合适的位置,并可以与目标人2进行舒适的交流,而不造成目标人2或周围人的心理压力。
[0226]
本公开的优选实施例已参照附图叙述,而本公开不限于上述示例。本领域的技术人员可在所附权利要求的范围内发现各种变化和修改,并应理解,他们自然属于本公开的技术范围。
[0227]
例如,还可以创建用于使移动体1的功能被施加在诸如cpu、rom、ram等的硬件上的计算机程序,其被并入上述移动体1中。还提供了存储计算机程序的计算机可读存储介质。
[0228]
此外,根据本实施例的移动体控制系统可以是移动体系统,其中至少有一部分移动体1的配置位于云上。
[0229]
此外,本说明书中所述的效果仅仅是说明性或例证性的效果,而且不是限制性的。也就是说,在上述效果的情况下,根据本公开的技术,可以从本说明书的描述中获得对本领域的技术人员来说清楚的其他效果。
[0230]
另外。本技术还可被如下配置。
[0231]
(1)一种移动体控制系统,包括:
[0232]
移动单元,被配置用来移动;
[0233]
测量单元,被配置用来测量与作为交流目标的目标的角度和距离;
[0234]
情绪评估单元,被配置用来评估所述目标的情绪;以及
[0235]
控制单元,被配置用来根据评估的情绪,控制所述移动单元将所述移动体移动到具有相对于所述目标的适当角度和距离的初始位置。
[0236]
(2)根据(1)的移动体控制系统,其中,当所述情绪评估单元评估所述目标具有正面情绪时,所述控制单元控制所述移动单元将所述移动体移动到第一接近位置、而不改变相对于所述目标的角度,在第一接近位置上,到所述目标的距离比所述初始位置更近。
[0237]
(3)根据(2)的移动体控制系统,其中,当在所述移动体处于第一接近位置时、所述情绪评估单元评估所述目标具有正面情绪时,所述控制单元控制所述移动单元将所述移动体移动到第二接近位置,同时改变相对于所述目标的角度,在第二接近位置上,到所述目标的距离比所述第一接近位置更近。
[0238]
(4)根据(3)的移动体控制系统,其中,所述控制单元控制所述移动单元,使得所述移动体从第一接近位置处的所述移动体与所述目标面对面的角度移动到第二接近位置处的所述移动体与所述目标并排的角度。
[0239]
(5)根据(3)或(4)的移动体控制系统,其中,当在所述移动体处于第二接近位置时、所述情绪评估单元评估所述目标具有负面情绪时,所述控制单元控制所述移动单元移动到第一接近位置,同时改变相对于所述目标的角度。
[0240]
(6)根据(2)的移动体控制系统,其中,当在所述移动体处于第一接近位置时、所述情绪评估单元评估所述目标具有负面情绪时,所述控制单元控制所述移动单元移动到所述
初始位置,而不改变相对于所述目标的角度。
[0241]
(7)根据(2)至(6)中的任一个的移动体控制系统,其中,当所述情绪评估单元评估所述目标具有负面情绪时,所述控制单元控制所述移动单元改变所述移动体相对于所述目标的角度。
[0242]
(8)根据(7)的移动体控制系统,其中,所述控制单元控制所述移动单元增大所述移动体相对于所述目标的角度。
[0243]
(9)根据(1)至(8)中的任一个的移动体控制系统,还包括:
[0244]
识别单元,被配置用来执行所述目标的个体识别;以及
[0245]
存储控制单元,被配置用来针对每个识别的个体,控制将所述测量单元测量的所述移动体和所述目标之间的角度和距离、以及当所述移动体位于所述角度和距离时的所述目标的情绪存储在存储单元中,作为历史信息,
[0246]
其中,所述控制单元基于在所述存储单元中存储的有关与所述目标的角度和距离、以及所述目标情绪的所述历史信息,控制所述移动单元移动到相对于所述目标的适当位置。
[0247]
(10)根据(9)的移动体控制系统,其中,即使在所述目标当前具有正面情绪时,所述控制单元也基于所述历史信息而控制是否移动到第三接近位置,在第三接近位置上,到所述目标的距离比所述移动体的当前位置更接近。
[0248]
(11)根据(1)至(10)中的任一个的移动体控制系统,还包括:
[0249]
气氛评估单元,被配置用来评估所述目标的周围气氛,
[0250]
其中,所述控制单元基于所述周围气氛,控制所述移动单元移动到相对于所述目标的适当位置。
[0251]
(12)根据(11)的移动体控制系统,其中,所述气氛评估单元基于位于所述目标周围的另一个目标的情绪,评估所述目标的周围气氛。
[0252]
(13)根据(12)的移动体控制系统,其中,所述气氛评估单元基于位于所述目标周围的所述另一个目标与所述目标之间的距离、或多个其他目标之间的距离、以及所述另一个目标的情绪,评估所述目标的周围气氛。
[0253]
(14)根据(11)至(13)中的任一个的移动体控制系统,其中,所述控制单元基于当前的周围气氛、以及包括在存储单元中存储的过去的与所述目标的角度和距离、周围气氛及所述目标的情绪的历史信息,控制所述移动体移动到相对于所述目标的适当位置。
[0254]
(15)根据(1)至(14)中的任一个的移动体控制系统,其中,所述适当的初始位置具有预设的距离和角度。
[0255]
(16)一种控制方法,包括:
[0256]
由测量单元测量与作为交流目标的目标的角度和距离;
[0257]
评估所述目标的情绪;以及
[0258]
根据评估的情绪,由控制单元控制移动单元将移动体移动到具有相对于所述目标的适当角度和距离的初始位置。
[0259]
(17)一种存储介质,其中存储有程序,所述程序使计算机用作:
[0260]
被配置用来移动的移动单元;
[0261]
测量单元,被配置用来测量与作为交流目标的目标的角度和距离;
[0262]
情绪评估单元,被配置用来评估所述目标的情绪;以及
[0263]
控制单元,被配置用来根据评估的情绪,控制所述移动单元将移动体移动到具有相对于所述目标的适当角度和距离的初始位置。
[0264]
附图标记列表
[0265]
1、1a、1b、1c 移动体
[0266]
10、10
‑
1至10
‑
3 控制单元
[0267]
10a 情绪评估单元
[0268]
10b 移动位置计算单元
[0269]
10c 移动控制单元
[0270]
10d 个体识别单元
[0271]
10e 大气评估单元
[0272]
11 通信单元
[0273]
12 距离和角度测量单元
[0274]
13 移动单元
[0275]
14 摄像机
[0276]
15 麦克风
[0277]
16 扬声器
[0278]
17 位置测量单元
[0279]
18 对人位置知识db
[0280]
19 个体信息db
[0281]
20 交流历史存储单元。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1