一种智能物流小车
1.本发明涉及物流输送领域,特别涉及一种智能物流小车。
背景技术:
2.随着互联网和科学技术的发展,在全球的智能小车的广泛应用引起许多人的注意,而且制造业也正在向智能制造方向发展,制造出来的智能物流搬运设备在物流领域已经进行开发使用,因此智能物流小车得到快速发展,这种智能物流小车一般具有扫码识别、搬运物料、循迹等功能,可以替代大部分人工操作,减少人工成本。
3.目前的物流小车,在对物品进行搬运的过程中,仍存在着不足之处,导致物流效率较低。
技术实现要素:
4.本发明要解决的技术问题是克服现有技术的缺陷,提供一种智能物流小车。
5.为了解决上述技术问题,本发明提供了如下的技术方案:
6.本发明一种智能物流小车,包括上底板和下底板,所述上底板与下底板之间通过多根铜柱实现连接,并相互平行,所述上底板的顶端表面中间安装有轴承座,所述轴承座的外周分布安装有摄像头、稳压模块、开关、二维码模块和显示屏,所述轴承座的顶端表面安装有第一舵机,所述第一舵机传动连接有支撑梁,所述支撑梁的另一端安装有第二舵机,所述第二舵机通过旋转件连接有舵机摆臂,所述舵机摆臂的另一端连接有舵机支撑架,所述舵机支撑架设置有抓取机构,所述上底板的底端表面中间设置有第三舵机,且第三舵机的输出轴与轴承座的内部底端传动连接,所述第三舵机的一侧设置有控制板,所述下底板的顶端表面安装有电池和驱动模块,所述下底板的四角处均设置有电机,所述电机的输出轴连接有联轴器,所述联轴器的外周设置有全向轮,所述下底板的边沿处设置有多个红外传感器和灰度传感器。
7.作为本发明的一种优选技术方案,所述舵机支撑架为匚形构件,所述抓取机构包括第四舵机、主动齿轮、从动齿轮和爪子,所述舵机支撑架的顶端设置有第四舵机,所述舵机支撑架的内部一侧通过转杆安装有从动齿轮,所述从动齿轮的另一侧啮合有主动齿轮,所述第四舵机的输出轴贯穿至舵机支撑架的内部,并与主动齿轮传动相接,所述主动齿轮和从动齿轮的底端均固定安装有爪子。
8.作为本发明的一种优选技术方案,所述爪子包括上层弧形板和下层弧形板,且数量均为二,所述上层弧形板呈镜像对立设置,并分别与主动齿轮和从动齿轮的底端固定连接,所述上层弧形板与下层弧形板之间连接有螺柱。
9.作为本发明的一种优选技术方案,所述电池通过稳压器实现对摄像头、稳压模块、第一舵机、第二舵机、第三舵机、电机、显示屏、二维码模块、驱动模块、红外传感器和灰度传感器进行供电。
10.作为本发明的一种优选技术方案,所述全向轮与下底板为低底盘装配,且下底板
与地面高度小于10mm,所述全向轮的总数量为四,其中两个为横向,另两个为纵向。
11.与现有技术相比,本发明的有益效果如下:
12.1、车轮与底板采用低底盘装配方案,使得小车底板与地面的竖直距离低于10mm,有效的降低了小车的重心,同时使灰度传感器工作更高效和灵敏。
13.2、机械臂底部采用轴承座作为连接元件,摩擦力小,效率高,实现能量利用最大化。
14.3、小车机械臂由四个数字舵机与多块连接板和支撑板及末端抓取机构构成,每个舵机均牢牢固定在相应位置,结构紧凑,执行可靠,具有多个自由度,能实现无死角抓取。
15.4、小车采用两横向两纵向共四个全向轮设计,可实现小车360
°
全方位轻松行走,避免了转弯带来的行进误差。
16.5、利用灰度传感器进行辅助循迹、计数和定位,提高了小车行进的准确性。
17.6、抓取机构设计为齿轮传动,保证了传动的准确性和可靠性,可稳定抓取物体。
附图说明
18.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
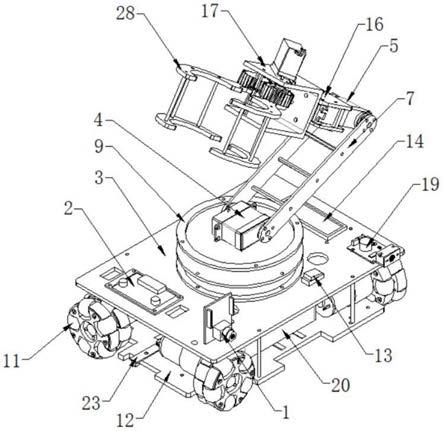
19.图1是本发明的整体结构示意图;
20.图2是本发明的整体结构爆炸图;
21.图3是本发明的抓取机构结构示意图;
22.图4是本发明的整体结构俯视图;
23.图5是本发明的整体结构侧视图;
24.图6是本发明的整体结构正视图;
25.图7是本发明的整体结构仰视图;
26.图8是本发明的实施例中场景布置示意图图;
27.图9是本发明的实施例中arduino串口通信部分图;
28.图中:1、摄像头;2、稳压模块;3、上底板;4、第一舵机;5、第二舵机;6、第三舵机;7、支撑梁;9、轴承座;10、电机;11、全向轮;12、下底板;13、开关;14、显示屏;16、舵机摆臂;17、舵机支撑架;18、控制板;19、二维码模块;20、电池;21、驱动模块;22、联轴器;23、红外传感器;24、灰度传感器;25、第四舵机;26、主动齿轮;27、从动齿轮;28、爪子;281、上层弧形板;282、下层弧形板;283、螺柱。
具体实施方式
29.以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
30.实施例1
31.如图1
‑
9所示,本发明提供一种智能物流小车,包括上底板3和下底板12,上底板3与下底板12之间通过多根铜柱实现连接,并相互平行,上底板3的顶端表面中间安装有轴承座9,轴承座9的外周分布安装有摄像头1、稳压模块2、开关13、二维码模块19和显示屏14,轴承座9的顶端表面安装有第一舵机4,第一舵机4传动连接有支撑梁7,支撑梁7的另一端安装
有第二舵机5,第二舵机5通过旋转件连接有舵机摆臂16,舵机摆臂16的另一端连接有舵机支撑架17,舵机支撑架17设置有抓取机构,上底板3的底端表面中间设置有第三舵机6,且第三舵机6的输出轴与轴承座9的内部底端传动连接,第三舵机6的一侧设置有控制板18,下底板12的顶端表面安装有电池20和驱动模块21,下底板12的四角处均设置有电机10,电机10的输出轴连接有联轴器22,联轴器22的外周设置有全向轮11,下底板12的边沿处设置有多个红外传感器23和灰度传感器24。
32.进一步的,舵机支撑架17为匚形构件,抓取机构包括第四舵机25、主动齿轮26、从动齿轮27和爪子28,舵机支撑架17的顶端设置有第四舵机25,舵机支撑架17的内部一侧通过转杆安装有从动齿轮27,从动齿轮27的另一侧啮合有主动齿轮26,第四舵机25的输出轴贯穿至舵机支撑架17的内部,并与主动齿轮26传动相接,主动齿轮26和从动齿轮27的底端均固定安装有爪子28。
33.爪子28包括上层弧形板281和下层弧形板282,且数量均为二,上层弧形板281呈镜像对立设置,并分别与主动齿轮26和从动齿轮27的底端固定连接,上层弧形板281与下层弧形板282之间连接有螺柱283。
34.电池20通过稳压器实现对摄像头1、稳压模块2、第一舵机4、第二舵机5、第三舵机6、电机10、显示屏14、二维码模块19、驱动模块21、红外传感器23和灰度传感器24进行供电。
35.全向轮11与下底板12为低底盘装配,且下底板12与地面高度小于10mm,全向轮11的总数量为四,其中两个为横向,另两个为纵向。
36.具体的,首先进行电路连接,将电池20连接多个稳压器,电池20采用聚合物锂电池可更好进行供电和续航,将所需不同电压的模块分别通过对应的稳压器进行供电,舵机和电机采用单独稳压器进行供电;运行场景布置,在地面设置小车循迹数线和物块放置点,并在物块放置点的一侧设置二维码图片,如图8所示;
37.小车运行流程为:
38.1、启动程序,执行预设的程序走出初始位置,其中控制板18型号为arduino mega2560,具有具有54路数字输入输出,适合需要大量io接口的设计。可通过3种方式供电,而且能自动选择供电方式,处理器核心是atmega2560,同时具有54路数字输入/输出口(其中15路可作为pwm输出),15路模拟输入,4路uart接口,一个16mhz晶体振荡器,一个usb口,一个电源插座,一个icsp header和一个复位按钮,14路数字输入输出口,工作电压为5v,每一路能输出和接入最大电流为40ma,每一路配置了20
‑
50k欧姆内部上拉电阻,驱动模块21采用l298n,数量为二,l298n调整平滑,调速范围广,过载能力大,能承受频繁的负载冲击,还可以实现频繁的无极快速启动,制动和反转,每个驱动模块21分别对应驱动两个电机10,由电机10带动联轴器22,从而使联轴器22外端的全向轮11转动;
39.2、通过循迹和数线使小车定位到二维码前,通过灰度传感器24利用不同颜色的检测面对光的反射程度不同,光敏电阻对不同检测面返回的光其阻值也不同的原理进行颜色深浅检测,在环境光干扰不是很严重的情况下,用于区别黑色与其它颜色,从而实现现车的巡线功能,红外传感器23可检测小车周身与其他物体的距离,避免移动过程中发生碰撞;
40.3、通过二维码模块19读取二维码,二维码模块19的使用与arduino串口通讯内容相关联,通过两个单片机的串口通讯来获取使arduino获取二维码信息,定义char值变量后,串口初始化,给char值变量赋值后显示在串口监视器上,由显示器14显示读取二维码的
内容,也就是所需要的抓取物块的顺序,显示器14为lcd显示屏或oled显示屏中的任意一种;
41.4、小车再通过循迹和数线走到物块前,通过摄像头1对物体颜色进行识别,摄像头采用open mv,是一款集成摄像头,可以通过python对open mv进行编码达到对颜色识别的功能,从而实现对物体进行辨识,open mv也可以用于做机器人视觉对获取的图像进行处理,从而达到所需要的要求,通过机器人视觉可以准确的达到精准放置的效果,可以大大提高机械臂的放置准确性,在arduino串口通信部分,如图9所示,在open mv中要写一句判断语句,当open mv收到一个数字50或者49,这时open mv要打开颜色识别功能并执行一次后关闭该功能,之后使用数列color
‑
read[]接收openmv返回的颜色数据,再进行判断;
[0042]
5、随后按照顺序来对扫取的二维码执行物块搬运,搬运过程中定位通过地面的循迹数线实现,抓取物块时,通过第三舵机6带动轴承座9上方转动实现抓放角度的调节,通过第一舵机4带动支撑梁7摆动,通过第二舵机5带动舵机摆臂16进行摆动,从而使另一端的舵机支撑架17也随之摆动,实现不同的张合角度,之后通过伺服电机25驱动,带动主动齿轮26转动,主动齿轮26带动从动齿轮27,进而使爪子28进行张合,爪子28由上层弧形板281和下层弧形板282组成双层夹板结构,可以更好的对物块进行抓取;
[0043]
6、通过摄像头的视觉追踪实现对物块的精准放置;
[0044]
7、根据所扫二维码来判断小车最后的位置,并执行回到初始位置的程序,通过循迹和数线实现。
[0045]
最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1