用于机器人的关节的制作方法
1.本发明涉及用于机器人的关节。
背景技术:
2.文献jp h06 55482 a公开了能够在空间中旋转的关节,该关节具有壳体、安装在壳体处的悬臂、用于驱动悬臂的马达和安装在马达处的用于减小马达的旋转速度的减速器,其中,导热的介质安装在马达处并且导热的元件设置在关节的暴露在空间中的部分处。热辐射元件设置在暴露于空间中的连接部分上,热辐射元件和导热介质耦合,热辐射元件固定在与低导热性元件的连接部处,并且绝热体设置在从热辐射元件辐射至连接部的表面上。
3.jp s60 108292 a公开工业机器人的导热的关节,该导热的关节包括用于驱动关节的马达、用于疏导由马达产生的热量的换热管和用于疏导/疏导热量的导热元件。
4.jp 2004 222428 a解决了提供在功率模块中集成的执行器的问题,其中,当布置在功率模块部分和执行器上的功率开关元件的导热性能实现改进时,能够同时实现在轴向方向上缩短执行器,简化布线和避免错误布线。解决方案如下,在集成的功率模块中,功率模块布置在壳体环周处,在功率模块中功率开关元件或类似物被包含在圆柱形的壳体中。布置多个导热的肋条,肋条被构造为在壳体与功率模块之间,以使肋条在轴向方向上延伸,通过胶粘使肋条与壳体连接并且安装该肋条,以使肋条与功率模块保持接触。用壳体与功率模块之间的部分围绕冷却通道,以使冷却介质部分地穿过多个导热肋条之间。
5.专利文献ep 1 829 651 b1公开一种机器人的关节结构,以用于操作与机器人肢节连接的装置,其中,关节结构包括:第一马达,该第一马达用于促使涉及机器人肢节的装置实施纵向回转运动;第二马达,该第二马达用于促使涉及机器人肢节的装置实施侧向回转运动;和基底,其特征在于,即第一马达和第二马达布置在基底处,以使第一马达的输出轴和第二马达的输出轴彼此平行并且正交于机器人肢节。
6.尤其轻量化机器人在其机器人关节中通常具有这样的关节结构,即所谓的“接头”。
7.通过集成在接头中的各个部件和在机器人关节中的接头,存在的问题为,仅能困难地导出在接头的部件中产生的热量。由此,这表明对于接头的所有部件都存在的热问题。
技术实现要素:
8.本发明基于的任务在于,如下改进机器人关节。
9.任务的解决方案通过本发明,即用于机器人、尤其是协作机器人的关节实现,该用于机器人的关节具有多个部件,至少具有
[0010]-用于移动关节的驱动装置,
[0011]-用于提供转速信息、换向信息和/或位置信息的传感器,
[0012]-用于从关节导出热量的换热管,
[0013]
其中,关节具有多个换热管,其中,第一换热管触及部件的第一子部分,其中,第二换热管触及部件的第二子部分。
[0014]
换热管是热交换器,该换热管在使用介质的蒸发热的情况下允许高的热流密度。由于有利的细长的结构,换热管尤其良好地适用于关节,因为能够在小的横截面上传输大的热量。
[0015]
换热管能够被构造作为热管或作为两相热虹吸系统。换热管的另外的实施方案也是可行的。
[0016]
在换热管的两个构型中基础的功能原理基本是相同的。区别尤其在于优选的气态的工作介质到蒸发器、即到输送热量的部位处的回运。回运在两个构型中被动进行并且因此没有辅助工具诸如循环泵。
[0017]
在热虹吸系统中充分利用重力(gravitation),在热管中,毛细力确保了工作介质的回运。
[0018]
有利地,换热管被构造为具有长形状的具有金属的容器,该容器包含非常紧密的密封的体积。换热管有利地用工作介质,例如水或氨填充。工作介质以液态填充小部分体积,以气态填充更大部分体积。
[0019]
容器中用作能量接收、尤其是热量接收的部位称作蒸发器。容器中用作能量散发、尤其是热量散发的部位称作电容器。蒸发器能够位于端部或中间。
[0020]
在一个有利的实施方式中,驱动装置具有电机和变流器。
[0021]
优选地,电机是电动旋转机、尤其是马达。
[0022]
有利地,机器是伺服马达。
[0023]
然而,直线式马达也是可行的。
[0024]
在一个有利的实施方式中,关节具有作为其他部件的传动装置。
[0025]
这是有利的,因为以这种方式能够由小的结构体积产生所需的高的转矩。
[0026]
还能够考虑,在关节中存在直接驱动装置。
[0027]
在一个有利的实施方式中,关节具有作为其他部件的制动装置。
[0028]
这是有利的,因为由此精确的运动过程是可行的。此外,因此在电力故障时机器人也能保持稳定。
[0029]
制动效果还能够通过自锁的传动装置实现。
[0030]
在一个有利的实施方式中,关节具有至少一个外部的冷却体。
[0031]
有利地,关节具有多个外部的冷却体。外部的冷却体例如布置在关节的前轴向端部处和关节的后轴向端部处。然而,其他类型的布置也是可行的。
[0032]
有利地,外部的冷却体例如借助于肋条结构具有扩大的表面。
[0033]
在一个有利的实施方式中,换热管被构造用于将热量散发到外部的冷却体处。
[0034]
有利地,换热管为此连接在外部的冷却体处。
[0035]
有利地,换热管和外部的冷却体连接,使得产生良好的传热。
[0036]
在一个有利的实施方式中,换热管被构造作为热管。
[0037]
这是有利的,因为由此热量能够被有效率地导出。热管还仅需要少量构造空间。
[0038]
此外,热管具有优点,因为机器人的关节移动并且因此改变换热管的位置。热传递总是通过热管起作用,因为无论方向如何都利用毛细力。
[0039]
在一个有利的实施方式中,换热管被构造为触及至少一个部件、优选触及多个部件,以用于接收热量。
[0040]
换热管能够为此布置在部件的边缘区域处。换热管还能够穿过部件。
[0041]
在一个有利的实施方式中,部件被布置为彼此轴向排成行。
[0042]
这提供的优点为,仅需要少量构造空间。因此,换热管还能够以最佳方式布置。
[0043]
在一个有利的实施方式中,关节具有两个外部的冷却体,其中,第一外部冷却体被布置在关节的前轴向端部处,其中,第二外部冷却体被布置在后轴向端部处。
[0044]
根据本发明,关节具有多个换热管,其中,第一换热管触及部件的第一子部分,其中,第二换热管触及部件的第二子部分。
[0045]
这些实施方式取决于,哪些部件在接头中是热决定性的并且哪些部分在接头中固定或旋转。有利地,换热管的布置应灵活地适配于接头的设计。
[0046]
以上提出的目的的解决方案还通过具有这样的关节的机器人、尤其是协作机器人来实现。
[0047]
机器人具有所描述的关节或接头。在此包含的部件优选地经由热管和外部的冷却体排热。
[0048]
换热管、尤其是热管以高的传导性将热量从接头中导出并且有利地将热量散发到外部安装的冷却体处。在此,关于换热管的数量、换热管的布置以及造型和冷却体的布置的不同的变型是可行的。
[0049]
因为机器人自身的移动,通过所描述的冷却体的散热是充分的。
附图说明
[0050]
下面,根据在附图中示出的实施例详细描述和解释本发明。附图示出:
[0051]
图1示出机器人、尤其是协作机器人;
[0052]
图2示出接头;
[0053]
图3示出具有至少一个换热管的接头;
[0054]
图4示出接头的另一实施方案。
具体实施方式
[0055]
图1示出机器人1、尤其是协作机器人。
[0056]
机器人1在附图中具有第一臂段3、第二臂段4和第三臂段5。有利地,臂段3、4、5被构造为可相对于一个或多个轴移动。例如,借助于关节2实现第三臂段5、也被称为下臂对于第二臂段4、也被称为上臂的相对移动。
[0057]
关节2具有结构、也被称为关节结构,该结构被构造作为接头7。这在图2中详细解释。
[0058]
此外,附图示出关节21。关节21也能够具有接头7。
[0059]
此外,机器人1具有工具6。
[0060]
图2示出接头7。
[0061]
接头7具有多个部件。这些部件包括用于移动关节2或21的驱动装置16和用于提供转速信息、换向信息和/或位置信息的传感器11。有利地,驱动装置16具有变流器15以及电
机14、尤其是电动旋转机,以作为马达来工作。
[0062]
有利地,电动旋转机14被构造作为伺服马达。因此,电动旋转机尤其良好地适用于实现两个臂段彼此间流畅且精准的相对移动。能够借助于工具6(见图1)确保工件的最佳加工。
[0063]
有利地,接头7还包括传动装置12。此外,附图示出制动装置13。所谓的部件被布置为相对于轴a彼此排成行。
[0064]
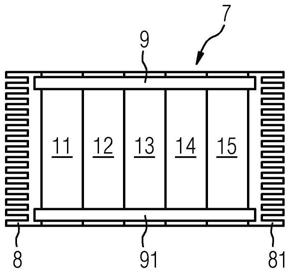
图3示出具有至少一个换热管9、91的接头7。
[0065]
在附图中描述两个换热管9、91。这样的实施方案具有尤其高的效率。
[0066]
优选地,换热管9、91被构造为热管。
[0067]
接头7还具有至少一个外部的冷却体8、81。有利地,该冷却体被布置在接头7的前端部处或轴向的后端部处。
[0068]
在附图中每个外部的冷却体8、81被布置在接头7的前轴向端部处和后轴向端部处。换热管9、91被构造用于从关节2、21、尤其是从接头7导出热量。
[0069]
换热管9、91还被构造用于,使得接收的热量能够被散发到至少一个外部的冷却体处、优选地散发到两个外部的冷却体8、81处。
[0070]
优选地,换热管9、91被构造为触及至少一个部件、优选地触及多个部件,以用于接收热量。
[0071]
有利地,两个换热管9和91被布置在接头7的至少基本上相对置的侧边处。这确保了热量的最佳导出。
[0072]
换热管9、91能够被布置在部件的边缘区域处。换热管9、91还能够穿过部件。
[0073]
还能够考虑的是,换热管9、91被布置在中间。
[0074]
图4示出接头7的另一实施方案。
[0075]
在附图中描述两个换热管10a、10b。此外,在附图中描述两个换热管101a、101b。
[0076]
第一换热管10a触及部件的第一子部分。第二换热管10b触及部件的第二子部分。以这种方式在外部冷却体8、81的方向上导出热量。
[0077]
第三换热管101a触及部件的第一子部分。第四换热管101b触及部件的第二子部分。同样以这种方式在外部冷却体8、81的方向上导出热量。
[0078]
这些实施方案是有利的,因为仅将需要无条件冷却或散热的部件与换热管连接。
[0079]
换热管10a、10b、101a、101b也能够触及部件的不同子部分。
[0080]
有利地,接头7具有至少基本上为圆形的横截面。
[0081]
有利地,多个换热管10a、10b、101a、101b均匀地分散布置在接头7的圆周上。
[0082]
本发明尤其良好地适用在合作机器人或协作机器人的关节中。这样的机器人1尤其良好地适用于与人的协同工作。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1