车门开门角度的控制方法、装置、系统、存储介质及车辆与流程
本发明涉及车辆,特别是涉及一种车门开门角度的控制方法、装置、系统、存储介质及车辆。
背景技术:
1、随着车辆控制技术的快速发展以及用户对车辆驾驶舒适性和乘坐舒适性的要求提高,车辆的智能化程度正在不断提高,车辆自动车门也逐渐被应用在各种智能化车辆中。
2、现有的车辆自动车门在开启时缺乏碰撞检测的过程,如果车门的开门区域内存在障碍物,则会导致车门在正常开启过程中与障碍物发生碰撞、刮擦,对车门造成损坏;如果车门的打开区域内存在障碍物,但是车门和障碍物之间仍存在足够用户上下车的空间,此时无法控制车门的开门角度。因此,车门的开门角度无法合理控制。
技术实现思路
1、本发明提供一种车门开门角度的控制方法、装置、系统、存储介质及车辆,在车门开启前进行障碍物检测,并将障碍物投影至空间网格中,根据障碍物的网格坐标合理控制车门的开门角度。
2、为了解决上述技术问题,第一方面,本发明实施例提供一种车门开门角度的控制方法,包括:
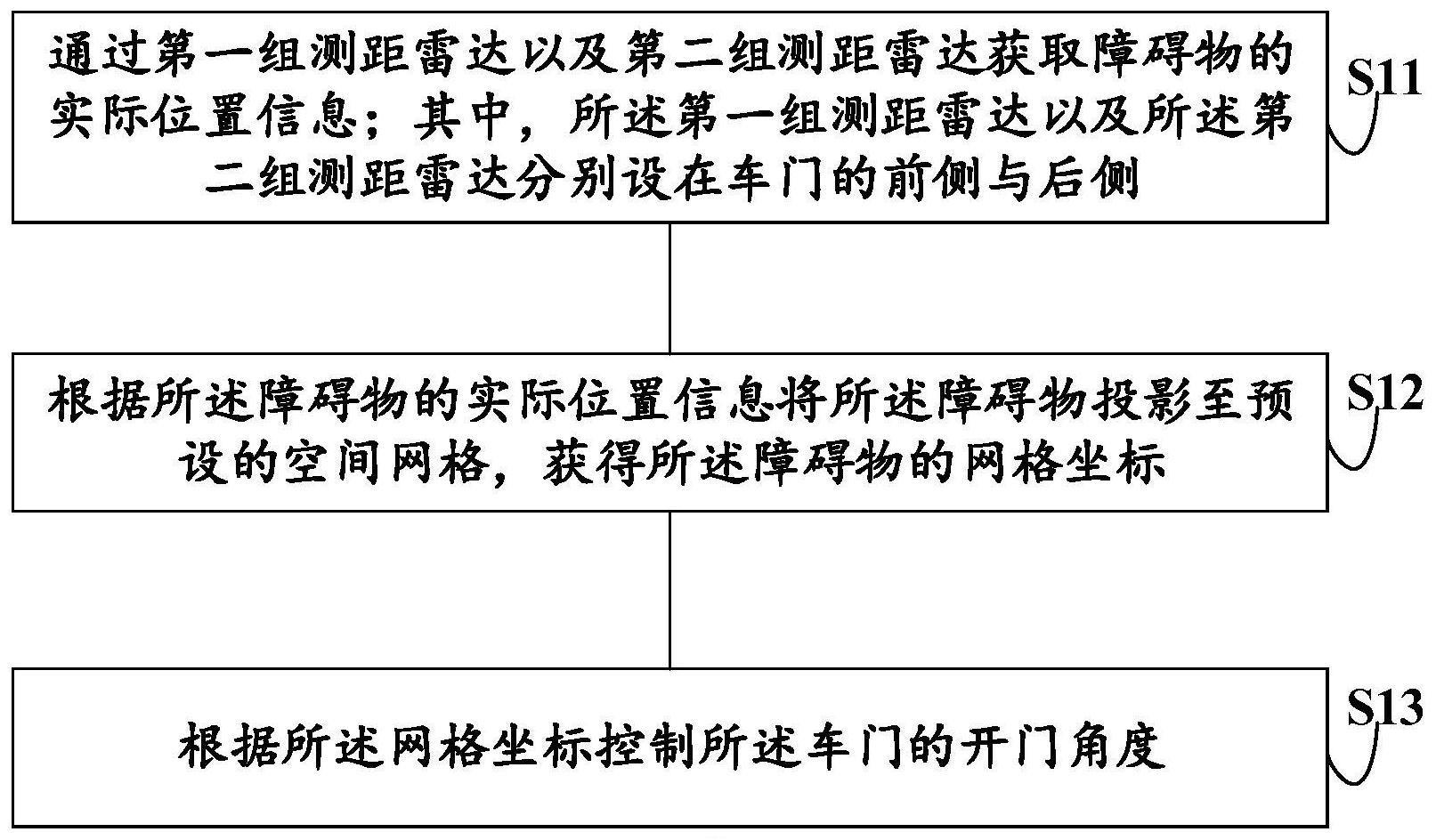
3、通过第一组测距雷达以及第二组测距雷达获取障碍物的实际位置信息;其中,所述第一组测距雷达以及所述第二组测距雷达分别设在车门的前侧与后侧;
4、根据所述障碍物的实际位置信息将所述障碍物投影至预设的空间网格,获得所述障碍物的网格坐标;
5、根据所述网格坐标控制所述车门的开门角度。
6、作为一个优选方案,所述根据所述网格坐标控制所述车门的开门角度,具体包括:
7、在以所述障碍物距离所述第一组测距雷达的连线的第一最短位置、所述障碍物距离所述第二组测距雷达的连线的第二最短位置以及所述网格坐标为顶点的三角形内,计算以所述第一最短位置为顶点的底边夹角;
8、若所述底边夹角为钝角,判定所述车门正常打开时不会与所述障碍物发生碰撞,控制所述车门正常打开;
9、若所述底边夹角为直角,判定所述车门正常打开时不会与所述障碍物发生碰撞,控制所述车门正常打开;
10、若所述底边夹角为锐角,判定所述车门正常打开时会与所述障碍物发生碰撞,将所述锐角与乘客能够上下车的最小角度阈值进行比较,若所述锐角不小于所述最小角度阈值,根据所述锐角控制所述车门打开至安全角度;其中,所述安全角度大于等于所述最小角度阈值且小于等于所述锐角。
11、作为一个优选方案,所述根据所述网格坐标控制所述车门的开门角度,具体包括:
12、将所述网格坐标与预设的正常开门网格坐标集合进行匹配;
13、若所述网格坐标属于所述预设的正常开门网格坐标集合,则匹配成功,判定所述车门正常打开时不会与所述障碍物发生碰撞,控制所述车门正常打开;
14、若所述网格坐标不属于所述预设的正常开门网格坐标集合,则匹配失败,判定所述车门正常打开时会与所述障碍物发生碰撞,基于预设的网格坐标与车门开启角度的对应关系,根据所述网格坐标获取目标开启角度,将所述目标开启角度与乘客能够上下车的最小角度阈值进行比较,若所述目标开启角度不小于所述最小角度阈值,根据所述目标开启角度控制所述车门打开至安全角度;其中,所述安全角度大于等于所述最小角度阈值且小于等于所述目标开启角度。
15、作为一个优选方案,在所述预设的空间网格中,每一个单位网格的形状为长方形。
16、为了解决上述技术问题,第二方面,本发明实施例提供一种车门开门角度的控制装置,包括:
17、测距模块,用于通过第一组测距雷达以及第二组测距雷达获取障碍物的实际位置信息;其中,所述第一组测距雷达以及所述第二组测距雷达分别设在车门的前侧与后侧;
18、投影模块,用于根据所述障碍物的实际位置信息将所述障碍物投影至预设的空间网格,获得所述障碍物的网格坐标;
19、控制模块,用于根据所述网格坐标控制所述车门的开门角度。
20、作为一个优选方案,所述控制模块具体包括:
21、夹角计算单元,用于在以所述障碍物距离所述第一组测距雷达的连线的第一最短位置、所述障碍物距离所述第二组测距雷达的连线的第二最短位置以及所述网格坐标为顶点的三角形内,计算以所述第一最短位置为顶点的底边夹角;
22、第一控制单元,用于若所述底边夹角为钝角,判定所述车门正常打开时不会与所述障碍物发生碰撞,控制所述车门正常打开;
23、第二控制单元,用于若所述底边夹角为直角,判定所述车门正常打开时不会与所述障碍物发生碰撞,控制所述车门正常打开;
24、第三控制单元,用于若所述底边夹角为锐角,判定所述车门正常打开时会与所述障碍物发生碰撞,将所述锐角与乘客能够上下车的最小角度阈值进行比较,若所述锐角不小于所述最小角度阈值,根据所述锐角控制所述车门打开至安全角度;其中,所述安全角度大于等于所述最小角度阈值且小于等于所述锐角。
25、作为一个优选方案,所述控制模块具体包括:
26、匹配单元,用于将所述网格坐标与预设的正常开门网格坐标集合进行匹配;
27、第四控制单元,用于若所述网格坐标属于所述预设的正常开门网格坐标集合,则匹配成功,判定所述车门正常打开时不会与所述障碍物发生碰撞,控制所述车门正常打开;
28、第五控制单元,用于若所述网格坐标不属于所述预设的正常开门网格坐标集合,则匹配失败,判定所述车门正常打开时会与所述障碍物发生碰撞,基于预设的网格坐标与车门开启角度的对应关系,根据所述网格坐标获取目标开启角度,将所述目标开启角度与乘客能够上下车的最小角度阈值进行比较,若所述目标开启角度不小于所述最小角度阈值,根据所述目标开启角度控制所述车门打开至安全角度;其中,所述安全角度大于等于所述最小角度阈值且小于等于所述目标开启角度。
29、作为一个优选方案,在所述预设的空间网格中,每一个单位网格的形状为长方形。
30、为了解决上述技术问题,第三方面,本发明实施例提供一种车门开门角度的控制系统,包括网关以及第一域控制器;其中,
31、所述网关用于通过第一组测距雷达以及第二组测距雷达获取障碍物的实际位置信息;其中,所述第一组测距雷达以及所述第二组测距雷达分别设在车门的前侧与后侧;
32、所述第一域控制器用于根据所述障碍物的实际位置信息将所述障碍物投影至预设的空间网格,获得所述障碍物的网格坐标;
33、所述第一域控制器还用于根据所述网格坐标控制所述车门的开门角度。
34、作为一个优选方案,所述系统还包括第二域控制器;其中,
35、所述第二域控制器用于显示所述障碍物的网格坐标以及所述车门的打开过程。
36、作为一个优选方案,所述第一域控制器为车身域控制器。
37、作为一个优选方案,所述第二域控制器为自动智能座舱域控制器。
38、为了解决上述技术问题,第四方面,本发明实施例提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被执行时实现如第一方面任一项所述的车门开门角度的控制方法。
39、为了解决上述技术问题,第五方面,本发明实施例提供一种车辆,所述车辆包括:
40、存储器,用于存储计算机程序;
41、处理器,用于执行所述计算机程序;
42、其中,所述处理器执行所述计算机程序时实现如第一方面任一项所述的车门开门角度的控制方法。
43、与现有技术相比,本发明实施例提供的一种车门开门角度的控制方法、装置、系统、存储介质及车辆,其有益效果在于:预先对空间网格进行了调试,在实时检测时,获取了障碍物的实际位置信息之后,先将该障碍物映射到预设空间网格中获取其网格坐标,再根据其网格坐标控制车门的开门角度,将碰撞检测与空间网格计算结合起来,能够准确地获取车门在打开过程是否会发生碰撞的结果,进而控制车门的打开与否以及开门角度,能够保证车辆安全以及乘客的人身安全。
- 还没有人留言评论。精彩留言会获得点赞!