一种智能后勤补给机器人的制作方法
1.本发明涉及补给机器人技术领域,具体的说是一种智能后勤补给机器人。
背景技术:
2.自动汽车,也称为机器人汽车,自动驾驶汽车,或无人驾驶汽车,是一种能够感知其环境并在很少或完全没有人工输入的情况下行驶的汽车。自动驾驶汽车结合了多种传感器来感知周围环境,例如雷达,激光雷达,声纳,全球定位系统,里程计和惯性测量单元。先进的控制系统对传感信息进行解释,以识别适当的导航路径,障碍物和相关标志。
3.在现有智能无人机械车辆相对成熟的背景下,缺少关于无人智能车辆加注燃油、故障处理以及系统维护等辅助的补给后勤机器人。
技术实现要素:
4.针对现有技术中的问题,本发明提供了一种智能后勤补给机器人。
5.本发明解决其技术问题所采用的技术方案是:一种智能后勤补给机器人,包括底座,所述底座上安装有四个位移装置,所述底座的尾端安装有电动拖车钩,所述底座的顶部设置有备用电池拓展设备载台、发电机模块、小油箱、油泵、油泵控制器、机械臂、多功能执行器、双目视觉采集器、大油箱、激光视觉数据采集器、视觉处理分析器和总控制器,所述油泵控制器与油泵电连接,所述油泵通过管道与小油箱和大油箱连接,所述双目视觉采集器上设置有前摄像头,所述视觉处理分析器与双目视觉采集器、前摄像头和激光视觉数据采集器之间电连接,所述总控制器与四个位移装置、油泵控制器、机械臂、多功能执行器和视觉处理分析器之间电连接。
6.具体的,所述发电机模块为柴油发电机或汽油发电机的其中一种,且所述发电机模块上设置有发电机接口控制面板,所述发电机接口控制面板分别与发电机模块和总控制器电连接。
7.具体的,所述底座的两侧均设置有加固设备拓展板。
8.具体的,所述多功能执行器上设置有环境摄像头、外接接口、油枪校正定位摄像头、油枪、前辅助定位摄像头和数据接口校正定位摄像头,所述环境摄像头、前辅助定位摄像头、油枪校正定位摄像头和数据接口校正定位摄像头与总控制器之间电连接;
9.所述油枪通过机械臂内置或外置管道与油泵的输出端连接。
10.具体的,所述外接接口包括工业插头、电源操作面板、12v/24v/48v供电接口、数据接口和控制接口。
11.具体的,所述油枪内置防漏电子安全阀门。
12.具体的,所述总控制器上设置有天线,所述天线与双目视觉采集器和视觉分析处理器之间电连接。
13.具体的,所述底座的侧壁安装有后辅助定位摄像头和激光辅助定位器,所述后辅助定位摄像头与总控制器电连接。
14.本发明的有益效果是:
15.本发明所述的一种智能后勤补给机器人,该机器人可实现对无人驾驶汽车进行补加燃油、故障处理和系统参数更换升级等辅助,打破了现有技术中缺少关于无人智能车辆或无人智能机械装备加注燃油、故障处理以及系统维护等辅助的补给后勤机器人的技术空白。
附图说明
16.下面结合附图和实施例对本发明进一步说明。
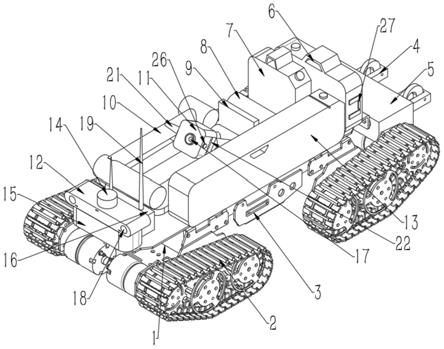
17.图1为本发明提供的一种智能后勤补给机器人的整体结构示意图;
18.图2为本发明提供的一种智能后勤补给机器人的左视结构示意图。
19.图中:1、底座;2、位移装置;3、加固设备拓展板;4、电动拖车钩;5、备用电池拓展设备载台;6、发电机模块;7、小油箱;8、油泵;9、油泵控制器;10、机械臂;11、多功能执行器;12、双目视觉采集器;13、大油箱;14、激光视觉数据采集器;15、视觉处理分析器;16、总控制器;17、环境摄像头;18、前摄像头;19、天线;20、油枪校正定位摄像头;21、油枪;22、外接接口;23、后辅助定位摄像头;24、前辅助定位摄像头;25、激光辅助定位器;26、数据接口校正定位摄像头;27、发电机接口控制面板。
具体实施方式
20.为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本发明。
21.如图1-图2所示,本发明的一种智能后勤补给机器人,包括底座1,底座1上安装有四个位移装置2,底座1的尾端安装有电动拖车钩4,底座1的顶部设置有备用电池拓展设备载台5、发电机模块6、小油箱7、油泵8、油泵控制器9、机械臂10、多功能执行器11、双目视觉采集器12、大油箱13、激光视觉数据采集器14、视觉处理分析器15和总控制器16,油泵控制器9与油泵8电连接,油泵8通过管道与小油箱7和大油箱13连接,双目视觉采集器12上设置有前摄像头18,视觉处理分析器15与双目视觉采集器12、前摄像头18和激光视觉数据采集器14之间电连接,总控制器16与四个位移装置2、油泵控制器9、机械臂10、多功能执行器11和视觉处理分析器15之间电连接。
22.位移装置2相当于轮子的功能,位移装置2主要包括驱动电机、履带轮和履带组成,驱动电机转动带动三个履带轮转动,从而带动该机器人在前进或者后退。适配沙漠,沙地,农田,开阔荒野等复杂地理条件,具有大容量,高越野性,高可靠性。
23.备用电池拓展设备载台5的作用是用于对该机器人进行供电与装载更多外拓设备,也可用来启动发电机模块6。
24.油泵8的作用是将小油箱7和大油箱13内的燃油输送到油枪21内,然后通过油枪21输送到需要添加燃油的车辆内。
25.发电机模块6的作用是为整车提供电能,发电机模块6也可以使用电池组代替。
26.小油箱7和大油箱13的作用均是由于盛放燃油,小油箱7和大油箱13可合并为一个超大油箱,以便于为发电机模块6提供燃料,同时也可以为需要添加燃油的车辆提供燃料。且小油箱7和大油箱13均为防爆型,针对野外环境可配置隔热防辐射防弹外壳,两个油箱进
行相连至油泵8,再由油泵8通过机械臂10连接至机械臂10末端油枪21处,可外连也可在机械内部相连。此外,小油箱7和大油箱13均采用可拆卸的方式安装在底座1上,采用模块化方式,方便安装拆卸,以便进行动力模式的切换。
27.前摄像头18的数量为两个,前摄像头18的拍摄角度为180度,主要负责该机器人的视觉,识别不同地形,不同坑洼石子等。
28.激光视觉数据采集器14为270度激光雷达,用于辅助地形障碍物识别,安装在双目视觉采集器12下方的视觉处理分析器15负责处理视觉信息、激光扫描信息、定位以及路线规划。
29.电动拖车钩4的作用是当目标机器严重系统故障时,将目标机器拖拽至工作站。
30.具体的,发电机模块6为柴油发电机或汽油发电机的其中一种,也可为电池组。且发电机模块6上设置有发电机接口控制面板27,发电机接口控制面板27分别与发电机模块6和总控制器16电连接。
31.具体的,底座1的两侧均设置有加固设备拓展板3。
32.具体的,多功能执行器11上设置有环境摄像头17、外接接口22、油枪校正定位摄像头20、油枪21、数据接口校正定位摄像头26,环境摄像头17、前辅助定位摄像头24、油枪校正定位摄像头20和数据接口校正定位摄像头26与总控制器16之间电连接;
33.油枪21通过机械臂内置或外置管道与油泵8的输出端连接。
34.环境摄像头17用于进行辅助环境视觉,具有灵活性。
35.外接接口22包括工业插头、电源操作面板、12v/24v/48v供电接口、数据接口和控制接口。
36.油枪校正定位摄像头20作用是针对待加油车加油孔进行辅助定位,采用十字定位的方式。
37.多功能执行器11上还设置有六个或多个工业数据传输接口,凹口,内置磁吸,安全性高,容错率低,使得位置精准性更高。还可以为目标智能机械车辆进行系统软件升级,物理重启,故障诊断,状态更新,也可在目标机器系统完全瘫痪时接管系统。
38.具体的,油枪21内置防漏电子安全阀门。
39.具体的,双目视觉采集器12上设置有天线19,天线19与双目视觉采集器12之间电连接。两根天线19负责通信,将监控画面、运行状态、油量以及机械臂10等信息进行实时传回与接受总工作站命令。
40.具体的,底座1的侧壁安装有后辅助定位摄像头23和激光辅助定位器25,所述后辅助定位摄像头23与总控制器16电连接。
41.具体的,前辅助定位摄像头24与总控制器16电连接。
42.本发明在使用时,总控制器16控制位移装置2运行,位移装置2运行带动该机器人前进,位移装置2的动能可由备用电池拓展设备载台5直接供电,也可以由发电机模块6发电后进行供电,该机器人在前进的过程中,设置在机器人上的激光视觉数据采集器14、环境摄像头17和前摄像头18对该机器人前进方向的路面信息进行勘察,并将拍摄的视频发送给视觉处理分析器15,经过视觉处理分析器15处理后发送给总控制器16,总控制器16对位移装置2进行控制,当需要对目标汽车进行添加燃料时,总控制器16根据定位摄像头20拍摄的定位画面对机械臂10进行控制,并同时控制油泵8运行,油泵8运行将小油箱7和大油箱13内的
燃油输送到油枪21内,然后通过油枪21输送到需要添加燃油的车辆内。
43.对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
44.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1