一种软体机器人及其驱动定向解耦控制方法
1.本发明属于小尺度软体机器人相关技术领域,更具体地,涉及一种软体机器人及其驱动定向解耦控制方法。
背景技术:
2.软体机器人以其优异的适应能力,在医疗康复、助老助残、外骨骼、连续操作、复杂环境监测探测、空间在轨操作等众多领域具有广泛的前景.软体机器人是柔性机器人的一种,它的模型大多来自于自然界的软体生物,如机器蛇、海洋水生动物机器人等。而其最突出的特点在于机器本体材料的选择主要是柔性的材料,而不是传统的刚性连接器和外壳。软体机器人相比刚性机器人有很多优势,它可以更好适应各种环境,受到外界冲击后也不会产生大的伤害,在空间狭小、非结构下的环境下都可以完成复杂的任务,例如医疗、军事及探测领域。另外,其材料可以用3d打印等方式来生产,成本也比刚性机器人要低得多。
3.小尺度的软体机器人在环境探测、环境保护和生物医疗等领域具有广泛的应用,现有化学燃料驱动的机器人难以同时对方向和运动进行实时动态的操控,存在无法控制启停、难以实现轨迹的精确控制等一系列问题,更缺乏对于启停和方向的解耦控制方法。因此,对机器人的运动控制处在初级的阶段,难以完成复杂的驱动控制,为此,有待进一步提出新的可同时解耦的实现机器人方向和驱动动作控制的方法。
技术实现要素:
4.针对现有技术的以上缺陷或改进需求,本发明提供了一种软体机器人及其驱动定向解耦控制方法,所述方法通过将空间三维驱动磁场正交分解为水平分量和垂直分量,利用垂直分量磁场触发磁控开关控制驱动燃料的定量释放,利用水平面内分量磁场向磁定向芯片提供定向力矩,从而实现对软体磁驱机器人的方向控制,磁控开关和磁定向磁场的磁畴需保持一致以实现控制过程中的自然解耦,故利用单一三维磁场可同时独立对多个磁响应器件实现控制,可用于软体磁驱机器人的在线的驱动和定向解耦控制,为小尺度机器人的研究和应用提供了基础的方法。
5.为实现上述目的,按照本发明的一个方面,提供了一种软体机器人的驱动定向解耦控制方法,所述方法包括以下步骤:
6.(1)提供软体机器人,所述软体机器人包括机器人本体、磁定向芯片、磁控开关及储料桶,所述储料桶固定在所述机器人本体上,所述磁定向芯片可拆卸地设置在所述机器人本体上,所述磁控开关的一端连接于所述储料桶;
7.(2)将用于驱动控制软体机器人的三维驱动磁场正交分解为水平分量及垂直分量,并将得到的水平方向磁场及垂直方向磁场分别施加给所述磁定向芯片及所述磁控开关,以控制所述软体机器人的方向及控制所述储料桶内储存的驱动燃料的释放,从而实现了软体机器人的运动控制、方向控制及驱动控制能同时独立操控。
8.进一步地,所述驱动燃料为表面活性剂。
9.进一步地,所述磁控开关的磁畴方向与所述磁定向芯片的磁畴方向一致。
10.进一步地,垂直方向磁场通过使磁控开关向下偏转而释放驱动燃料至水面,从而驱动所述机器人本体进行运动;在运动过程中,同时施加水平方向磁场给所述磁定向芯片,以提供定向转矩给所述磁定向芯片,所述磁定向芯片将受到的转矩传递给所述机器人本体,所述机器人本体进行原位定向。
11.进一步地,所述磁控开关为具有特定磁化方向的软磁导管,其在垂直方向磁场的作用下会发生偏转,以控制驱动燃料的释放速率、释放位置及通断,从而实现对软体机器人的运动进行控制。
12.按照本发明的另一个方面,提供了一种软体机器人,所述软体机器人是采用如上所述的软体机器人的驱动定向解耦控制方法进行定向及运动控制的,其包括所述机器人本体、磁定向芯片、磁控开关及储量桶外,还包括处理器及磁场组件,所述磁场组件用于产生均匀的水平方向磁场和垂直方向磁场;所述处理器用于控制所述磁场模块。
13.进一步地,所述磁定向芯片包括多个具有预定磁化方向的磁片,其在水平方向磁场的作用下会产生水平面内的旋转扭矩,并将旋转扭矩传递给所述机器人本体,以控制所述软体机器人的方向。
14.进一步地,所述处理器用于将驱动控制软体机器人的三维驱动磁场正交分解为水平分量及垂直分量,并控制磁场模块分别施加垂直方向磁场和水平方向磁场给所述磁控开关及磁定向芯片。
15.进一步地,所述磁定向芯片的数量为多个,多个所述磁定向芯片离散分布在所述机器人本体上。
16.总体而言,通过本发明所构思的以上技术方案与现有技术相比,本发明提供的软体机器人及其驱动定向解耦控制方法主要具有以下有益效果:
17.1.将用于驱动控制软体机器人的三维驱动磁场正交分解为水平分量及垂直分量,并将得到的水平方向磁场及垂直方向磁场分别施加给所述磁定向芯片及所述磁控开关,该对于软体磁驱机器人的驱动定向解耦方法,可广泛应用于小尺度软机器人的实时、无线、灵巧的运动控制,为小尺度仿生机器人、群体机器人的研究提供了全新的、基础的控制方法。
18.2.本发明提出的软体机器人的驱动定向解耦方法仅需要同一个三维磁场即可实现,极大的简化了控制的复杂性。
19.3.本发明提出的解耦控制方法,具有可高频响应的特性,可以极大地提升软体机器人的驱动控制能力。
20.4.本发明提出的软体机器人的驱动定向解耦方法中仅利用磁场,还可兼容其它物理场,以实现更加复杂的控制和功能集成。
21.5.所述处理器依据所述关系数据对所述磁场模块进行控制,以实时、快速、准确地使得所述磁场模块产生所需的垂直方向磁场,进而使得所述磁控开关达到所需的位姿,实现驱动燃料的通断、释放速率及释放位置的控制。
22.6.所述磁控开关为具有特定磁化方向的软磁导管,其在垂直方向磁场的作用下会发生偏转,以控制驱动燃料的释放速率、释放位置及通断,从而实现对软体机器人的运动进行控制。
附图说明
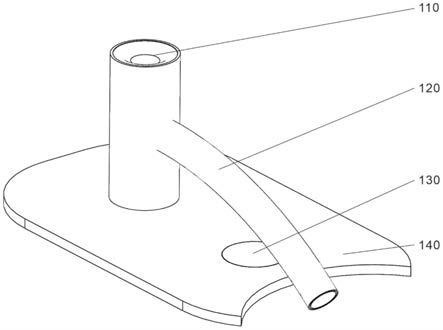
23.图1是本发明提供的一种软体机器人的结构示意图。
24.在所有附图中,相同的附图标记用来表示相同的元件或结构,其中:110-驱动燃料,120-磁控开关,130-磁定向芯片,140-机器人本体。
具体实施方式
25.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
26.请参阅图1,本发明提供的一种软体机器人的驱动定向解耦控制方法主要包括以下步骤:
27.步骤一,提供软体机器人,所述软体机器人包括机器人本体、磁定向芯片、磁控开关及储料桶,所述储料桶固定在所述机器人本体上,所述磁定向芯片可拆卸地设置在所述机器人本体上,所述磁控开关的一端连接于所述储料桶。
28.具体地,所述软体机器人包括磁控开关120、磁定向芯片130、机器人本体140及储料桶,所述储料桶固定在所述机器人本体140上,其用于储存驱动燃料110。所述磁定向芯片130嵌设在所述机器人本体140上。所述磁控开关120包括相背的两端,分别为固定端及自由端,所述固定端固定连接于所述储料桶的中部或者底部;所述自由端的位姿可调。
29.所述磁控开关120为具有特定磁化方向的软磁导管,其在垂直方向磁场的作用下会发生偏转,以控制驱动燃料110的释放速率、释放位置及通断,从而实现对软体机器人的运动进行控制。
30.本实施方式中,所述磁控开关120的组分包括质量比为20:1:40的pdms预聚物、交联剂和ndfeb磁粉颗粒,ndfeb磁粉颗粒的粒径为5微米。
31.所述磁定向芯片130包括多个具有预定磁化方向的磁片,其在水平方向磁场的作用下会产生水平面内的旋转扭矩,并将旋转扭矩传递给所述机器人本体140,以控制所述软体机器人的方向,定向的性能取决于所磁片占所述软体机器人的体积比、磁片的磁粒子掺杂浓度、磁化所述磁定向芯片130的磁化磁场的大小和水平方向磁场(驱动磁场)的大小。
32.本实施方式中,所述磁定向芯片130的组分包括质量比为20:1:40的pdms预聚物、交联剂和ndfeb磁粉颗粒,ndfeb磁粉颗粒的粒径为5微米;所述磁控开关120的磁畴方向与所述磁定向芯片130的磁畴方向保持空间一致;所述磁控开关120及所述磁定向芯片130均可通过磁粒子掺杂浓度、磁化磁场的强度、驱动磁场的强度进行定量调控。
33.所述驱动燃料110为化学驱动燃料,其具体可以为具有低表面张力的表面活性剂,可以改变局部水域的表面张力,从而形成张力梯度以驱动软体机器人,化学驱动燃料的释放可由外部驱动磁场进行定量的控制。
34.步骤二,将用于驱动控制软体机器人的三维驱动磁场正交分解为水平分量及垂直分量,并将得到的水平方向磁场及垂直方向磁场分别施加给所述磁定向芯片及所述磁控开关,以控制所述软体机器人的方向及控制所述储料桶内储存的驱动燃料的释放,从而实现了软体机器人的运动控制、方向控制及驱动控制能同时独立操控。
35.具体地,所述软体机器人还包括处理器及磁场组件,所述磁场组件用于产生均匀的水平方向磁场和垂直方向磁场。所述处理器用于控制所述磁场模块,以控制所述磁场模块所产生的垂直方向磁场的磁场强度及磁场方向,进而控制所磁控开关120的位姿。所述处理器内存储有所述磁控开关120的材质及刚度、磁化所述磁控开关120的磁化磁场的强度、以及所述磁控开关120的位姿与其自身的材质及刚度、磁化磁场的强度、驱动磁场的强度与方向的关系数据。所述处理器依据所述关系数据对所述磁场模块进行控制,以实时、快速、准确地使得所述磁场模块产生所需的垂直方向磁场,进而使得所述磁控开关120达到所需的位姿,实现驱动燃料110的通断、释放速率及释放位置的控制。
36.所述处理器用于将驱动控制软体机器人的三维驱动磁场正交分解为水平分量及垂直分量,并控制磁场模块分别施加垂直方向磁场和水平方向磁场给所述磁控开关120及所述磁定向芯片130。垂直分量的磁场通过使磁控开关120向下偏转而释放驱动燃料120至水面,从而驱动所述机器人本体140进行运动。在运动过程中,可同时施加水平分量的磁场给所述磁定向芯片130,以提供定向转矩给所述磁定向芯片130,所述磁定向芯片130将受到的转矩传递给所述机器人本体140,所述机器人本体140进行原位定向,从而实现所述机器人本体140的运动和驱动的同时控制,实现了对机器人本体140的运动和轨迹控制。
37.外加磁场中的水平分量会作用于磁定向芯片130,同时也会作用于磁控开关120,但由于磁定向芯片130和磁控开关120具有相同的磁畴方向,磁控开关120也产生与之同向的协同转向转矩,外加磁场中的竖直分量同时会控制控开关120实现对其驱动和运动的控制。
38.本发明还提供了如上所述的软体机器人,所述软体机器人是采用如上所述的软体机器人的驱动定向解耦控制方向进行定向及运动控制的。
39.本领域的技术人员容易理解,以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1