一种参数自适应的机器人碰撞检测方法
1.本发明涉及工业机器人控制技术领域,尤其涉及一种参数自适应的机器人碰撞检测方法。
背景技术:
2.工业机器人成为制造业实现智能化转型不可或缺的一部分,作为工业机器人智能化和开放性领域发展的一个重要方向,人机协作在机器人领域的发展中被得到越来越多的重视,人机协作的广泛应用对于机器人安全性的要求也越来越高,因此有必要对机器人采取安全防撞措施,以避免人机协作过程中的意外碰撞事故的发生。
3.目前,国内外学者对于机器人碰撞检测技术已经有了数年的研究,提出多种不同的检测方案,主要分为基于外部传感器和未使用外部传感器两种方法。基于外部传感器的方法有在机器人外表覆盖一层敏感皮肤,该方法能精确检测出碰撞及碰撞部位,但是大大增加了机器人的复杂度与成本,降低了灵活性;还有人在机器人关节处添加力传感器,该方案极大增加了机器人生产成本。未使用外部传感器的方法有的基于机器人动力学模型,通过比较动力学模型预测的关节输出力矩与关节实际输出力矩,来检测是否发生碰撞,但是在使用过程中机器人模型会发生变化,从而导致检测错误。上述现有方法都难以满足人机协作过程中安全性的要求。
技术实现要素:
4.为了克服上述现有技术的缺点,本发明的目的在于提供一种参数自适应的机器人碰撞检测方法,不需要增加额外传感器、且可以进行模型参数自适应。
5.为了达到上述目的,本发明采取的技术方案为:
6.一种参数自适应的机器人碰撞检测方法,包括如下步骤:
7.1)进行机器人动力学建模及动力学参数辨识;
8.2)在机器人动力学模型的基础上,设计基于广义动量的扰动观测器,用于机器人外部碰撞力的检测;
9.3)设计机器人动力学参数自适应方法;
10.4)设置动态变化的动量观测器残差阈值;
11.5)采集机器人运行过程中的角度、角速度以及电流信号作为方法输入,当估计的外部碰撞力超过动量观测器残差阈值范围时,判断为机器人与外界物体或操作人员发生碰撞。
12.所述的步骤1)中的机器人动力学参数辨识方法为:首先基于牛顿-欧拉方法或拉格朗日法构建机器人动力学模型,采用牛顿-欧拉法时,牛顿-欧拉法包含外推与内推两个步骤,外推为从关节一到关节六,通过各关节的角速度与角加速度求解所连接连杆的质心速度与质心加速度,进而求得各连杆所受到的力与力矩;内推为从连杆六到连杆一,通过连杆所受的力矩以及外界环境施加的力矩求解所连接关节所受到的力矩,求得如下机器人动
力学方程:
[0013][0014]
其中,q为关节的角位移,为关节角速度,为关节角加速度。m(q)为惯性矩阵,为哥氏矩阵,g(q)为重力项,τf为摩擦力项,τ为关节驱动力矩;
[0015]
将机器人动力学方程进行线性变换,转换为两部分的乘积,其中一部分为机器人动力学基本参数集,另一部分为非线性函数矩阵,与动力学参数无关,如下:
[0016][0017]
其中,为关于q,的非线性矩阵,xb为经过线性变换后的动力学基本参数集;
[0018]
设计基于周期性傅里叶级数的激励轨迹,并以条件数作为激励轨迹的优化标准;
[0019]
使机器人按照激励轨迹进行运动,同时采集机器人各关节的角度、角速度以及关节力矩的原始数据,对原始数据进行处理,采用最小二乘或其他方法进行动力学参数求解,得到机器人动力学模型。
[0020]
所述的步骤2)中机器人广义动量定义为:基于广义动量的扰动观测器为:
[0021][0022]
其中,r为外部碰撞力矩的观测值,k为增益常数;
[0023]
基于广义动量的扰动观测器实时采集机器人在运行过程中的角度、角速度以及关节电流数据,通过扰动观测器实时估计机器人所受到的外部碰撞力。
[0024]
所述的步骤3)中的机器人动力学参数自适应方法为:
[0025][0026][0027]
xb(t)=xb(t-1)+δxb[0028]
其中:γ1与γ2为增益常数,δxb为动力学基本参数集修正量,y
t
为关于q,的非线性矩阵的转置,为外部碰撞力矩观测值的微分;
[0029]
当机器人未发生碰撞时,以扰动观测器的残差值作为参数自适应方法的输入,以此进行机器人动力学模型参数的自适应调整。
[0030]
基于参数自适应的碰撞检测方法使用李雅普诺夫方程验证方法的稳定性与收敛性,如下:
[0031][0032]
[0033]
其中:v为李雅普诺夫算子,r为外部碰撞力矩的观测值,k为增益常数,δxb为动力学基本参数集修正量;
[0034]
设置动态变化的扰动观测器残差阈值,当估计的外部碰撞力超过阈值范围时,判断为机器人与外界物体或操作人员发生碰撞。
[0035]
本发明相对于现有技术而言,具有以下优点:
[0036]
(1)本发明不需要使用额外的传感器,只需要在控制器中植入方法内容,不会增加机器人的生产成本。
[0037]
(2)本发明进行碰撞检测时,未使用机器人的角加速度信号作为方法输入,由于角加速度需要由加速度进行微分而获得,而微分过程会引入大量的噪声,对检测方法产生严重干扰,本发明只使用角度、角速度与电流信号,避免了此问题的发生。
[0038]
(3)本发明使用动态变化的残差阈值,可以有效提高碰撞检测方法的灵敏度,提高碰撞检测方法的鲁棒性。
[0039]
(4)本发明可以在机器人运行过程中实时对机器人的动力学模型进行自适应校准,而不是使用最开始动力学参数辨识方法得到的固定数值,可以有效解决机器人动力学模型参数无法准确获得且在机器人运行过程中动力学模型参数会发生变化的问题。
附图说明
[0040]
图1是本发明机器人动力学建模及动力学参数辨识的流程图。
[0041]
图2是本发明基于广义动量的碰撞检测方法框架图。
[0042]
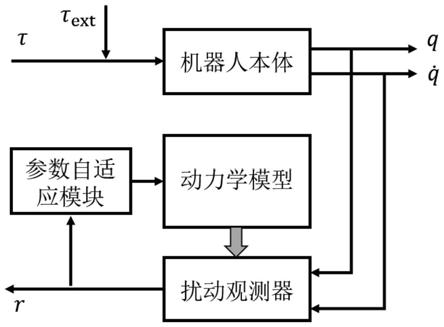
图3是本发明基于参数自适应的碰撞检测方法框架图。
具体实施方式
[0043]
下面结合附图和实施例对本发明做进一步阐述和说明。
[0044]
一种参数自适应的机器人碰撞检测方法,包括如下步骤:
[0045]
1)进行机器人动力学建模及动力学参数辨识;
[0046]
参照图1,机器人动力学参数辨识方法具体为:首先基于牛顿-欧拉法构建机器人动力学模型,当连杆数较多时,牛顿-欧拉法的求解方法较为简捷,因此以牛顿-欧拉法为例,牛顿-欧拉法包含外推与内推两个步骤,外推为从关节一到关节六,通过各关节的角速度与角加速度求解所连接连杆的质心速度与质心加速度,进而求得各连杆所受到的力与力矩;内推为从连杆六到连杆一,通过连杆所受的力矩以及外界环境施加的力矩求解所连接关节所受到的力矩,可以求得如下机器人动力学方程:
[0047][0048]
其中,q为关节的角位移,为关节角速度,为关节角加速度,m(q)为惯性矩阵,为哥氏矩阵,g(q)为重力项,τf为摩擦力项,τ为关节驱动力矩;
[0049]
将机器人动力学模型进行线性变换,转换为两部分的乘积,其中一部分为机器人动力学基本参数集,另一部分为非线性函数矩阵,与动力学参数无关,如下:
[0050]
[0051]
其中,为关于q,的非线性矩阵,xb为经过线性变换后的动力学基本参数集;
[0052]
设计基于周期性傅里叶级数的激励轨迹,并以条件数作为激励轨迹的优化标准;
[0053]
使机器人按照激励轨迹进行运动,同时采集机器人各关节的角度、角速度以及关节力矩等原始数据,对原始数据进行处理,采用最小二乘进行动力学参数求解,得到机器人动力学模型;
[0054]
2)在机器人动力学模型的基础上,设计基于广义动量的扰动观测器,用于机器人外部碰撞力的检测;
[0055]
当得到机器人动力学模型后,由机器人动力学模型设计基于广义动量的扰动观测器方法,扰动观测器方法框架如图2所示,框架上半部分为机械臂本体动力学模型,下半部分为扰动观测器方法框架,由图2可以看到获取机械臂本体的关节驱动力矩、关节角度以及关节角速度并将其输入到扰动观测器中,便可以估计出机械臂外部的干扰力矩;机器人广义动量定义为:基于广义动量的扰动观测器方法如下:
[0056][0057]
其中,r为外部碰撞力矩的观测值;k为增益常数;
[0058]
根据基于广义动量的扰动观测器方法实时采集机器人在运行过程中的角度、角速度以及关节电流数据,通过扰动观测器实时估计机器人所受到的外部碰撞力;
[0059]
3)设计机器人动力学参数自适应方法;
[0060]
基于广义动量的扰动观测器方法是基于机器人动力学模型建立的,对于机器人动力学模型的准确性依赖较大,当机器人动力学模型辨识不准确时,扰动观测器的碰撞检测效果较差,会产生误报现象;并且随着机器人的不断运行,机器人的动力学模型也会发生变化,导致扰动观测器的碰撞检测出现误报,因此引入机器人动力学参数自适应方法以解决机器人动力学参数无法准确获得且动力学模型在机器人运行过程中发生变化的问题;
[0061]
基于广义动量的扰动观测器添加参数自适应模块即基于参数自适应的碰撞检测方法可表示为:
[0062][0063][0064]
xb(t)=xb(t-1)+δxb[0065]
其中:γ1与γ2为增益常数,δxb为动力学基本参数集修正量,y
t
为关于q,的非线性矩阵的转置,为外部碰撞力矩观测值的微分;
[0066]
基于参数自适应的碰撞检测方法是以广义动量观测器为基础,如图3所示,通过实时采集机器人运行过程中的角度、角速度以及电流信号来估计所受到的外部碰撞力;当未发生碰撞时,以扰动观测器的残差值作为基于参数自适应的碰撞检测方法的输入,以此进行机器人动力学模型参数的调整,提高扰动观测器的鲁棒性;
[0067]
4)设置动态变化的动量观测器残差阈值;
[0068]
扰动观测器估计的外部碰撞力由于噪声以及其他的外部干扰,并且由于准确的机器人动力学模型无法获得,因此存在一定的初始误差值也即残差,因此设置机器人碰撞上限阈值以及碰撞下限阈值;
[0069]
5)采集机器人运行过程中的角度、角速度以及电流信号作为方法输入,当估计的外部碰撞力超过动量观测器残差阈值范围时,判断为机器人与外界物体或操作人员发生碰撞。
[0070]
基于参数自适应的碰撞检测方法用来估计外部力矩的自适应观测器的机器人动力学模型参数是连续估计与更新的,而不是最开始动力学参数辨识方法得到的固定数值,因此,应该保证自适应观测器信号的稳定性来确保自适应方法的稳定性。所以针对不同系统,使用李雅普诺夫方程验证方法的稳定性与收敛性,如下:
[0071][0072][0073]
其中:v为李雅普诺夫算子,r为外部碰撞力矩的观测值,k为增益常数,δxb为动力学基本参数集修正量;
[0074]
由于扰动观测器的初始残差是随时间变化的,因此设置动态变化的扰动观测器残差阈值,当估计的外部碰撞力超过阈值范围时,判断为机器人与外界物体或操作人员发生碰撞。
[0075]
以上所述仅是对本发明的较佳实施例而已,并非对本发明作任何形式上的限制,凡是依据本发明的技术实质对以上实施例所做的任何简单修改,等同变化与修饰,均属于本发明技术方案的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1