紧固装置和紧固方法与流程
本技术实施例涉及紧固装置,并且更具体地,涉及一种紧固装置和紧固方法。
背景技术:
1、人体的关节在维持身体活动中起着关键性作用。以膝关节为例,人体的膝关节在走路、跑步等各种运动中起着控制与缓冲作用,承受了巨大的身体冲击力。用户运动过度或者运动姿势不正确可能会导致膝关节出现各类损伤性疾病,尤其是随着年龄的增长,该类疾病发生率更高。
2、助力装置能够在人体运动过程中提供一定的支撑和助力作用,从而减少人体关节受到的冲击力。目前主流的助力装置,例如可穿戴外骨骼机器人等,主要是通过与用户的肢体进行紧固绑缚,以起到支撑和助力的效果。但长时间的紧固绑缚容易造成用户肌肉挤压、血流不畅等问题,造成用户的穿戴舒适性不高。
3、因此,如何兼顾助力装置的穿戴舒适性和高效助力,是一个亟需解决的问题。
技术实现思路
1、本技术实施例提供一种紧固装置和紧固方法,该装置能够根据用户需求,自适应的调节绑缚部件与用户肢体的松紧程度,能够兼顾用户对穿戴舒适性与绑缚有效性的需求。
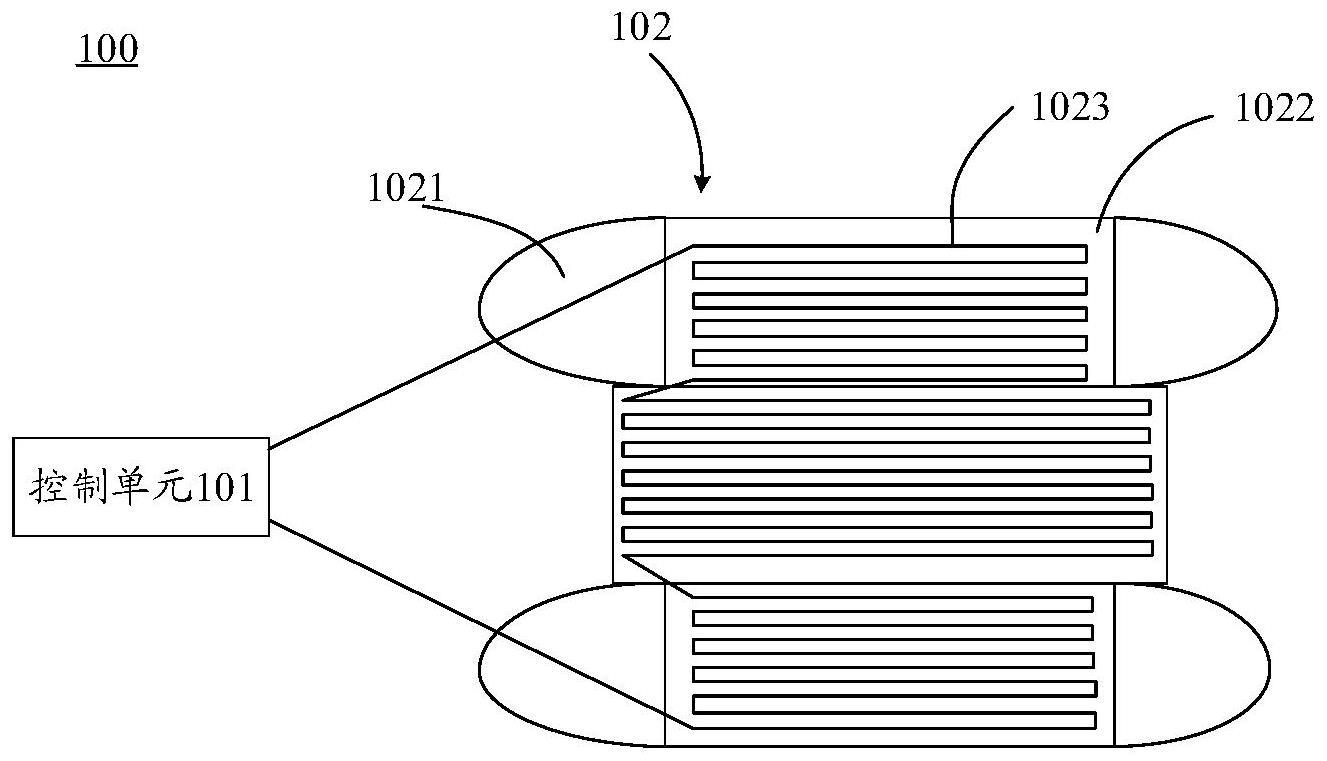
2、第一方面,提供了一种紧固装置,该紧固装置用于对用户的肢体进行紧固,包括绑缚部件和控制单元,其中,绑缚部件中布设有记忆合金,控制单元能够确定用户的运动情况,并且根据该用户的运动情况控制记忆合金的收缩或者伸长,从而达到控制绑缚部件与用户的肢体之间的松紧程度的目的。该用户的运动情况包括该用户的运动场景、运动相位和运动意图中的至少一项。
3、可选地,该用户的运动场景包括走路场景、跑步场景、上下楼梯场景、登山场景、滑冰场景、游泳场景、休息场景中的任意一项。
4、可选地,用户处于休息场景包括用户处于坐场景、卧场景等非站立场景。
5、可选地,该用户的运动相位包括第一运动相位和第二运动相位,其中,第一运动相位包括承重反应期或支撑相中期;第二运动相位包括首次触地期、支撑相末期、摆动前期、摆动相中的至少一种。
6、应理解,第一运动相位包括承重反应期或支撑相中期,具体是指:第一运动相位可以包括承重反应期和支撑相中期,也可以只包括承重反应期和支撑相中期中的任一项。
7、应理解,用户所处的运动相位是指用户所处的步态相位。
8、可选地,控制单元包括运动相位识别模块,该运动相位识别模块用于对用户的各个步态相位的识别。当运动相位识别模块识别到用户的步态相位为承重反应期或支撑相中期时,确定用户处于第一运动相位,当运动相位识别模块识别到用户的步态相位为首次触地期、支撑相末期、摆动前期、摆动相中的任意一种时,确定用户处于第二运动相位。
9、应理解,第一运动相位为用户需要助力的运动相位,第二运动相位为用户不需要助力的运动相位。第一运动相位和第二运动相位的划分是以用户在步态周期内各个相位阶段的做功变化为依据的。此外,用户还可以根据实际助力需求划分第一运动相位和第二运动相位,本技术对此不做限定。
10、应理解,用户需要助力的情况是指用户靠自身做功完成运动比较困难或者特别困难的情况,用户不需要助力的情况是指用户靠自身做功可以轻松完成运动的情况。
11、示例性的,当用户的关节做功大于或等于第一阈值时,用户需要助力;当用户的关节做功小于第一阈值时,用户不需要助力,该第一阈值是用户根据自身情况预先设置的,或者是紧固装置根据用户的使用记录确定的,本技术对此不做限定。
12、可选地,用户的运动意图用于指示用户即将处于的运动场景和/或用户即将处于的运动相位。
13、可选地,控制单元包括微处理器。
14、本技术实施例中,绑缚部件中布设有记忆合金,控制单元能够根据用户的运动情况控制记忆合金的收缩或者伸长,进而实现紧固装置的收缩或者放松。这样当用户将绑缚部件绑缚于肢体部位后,可以实现对绑缚部件与用户的肢体之间的松紧程度的调节。例如在需要较好的绑缚有效性时,可以使绑缚部件与用户肢体之间的绑缚力大些,在需要较高的穿戴舒适性时,可以使绑缚部件与用户肢体之间的绑缚力小些,从而兼顾用户对穿戴舒适性与绑缚有效性的需求。
15、例如,当紧固装置用于为用户提供助力时,当控制单元根据用户的运动情况确定用户需要助力时,控制单元可以控制记忆合金收缩,使得绑缚部件紧贴着用户的肌肉曲线,确保在助力过程中施力点不发生偏移,以实现助力系统的高效助力。当控制单元根据用户的运动情况确定用户不需要助力时,控制单元可以控制记忆合金伸长,实现绑缚部件的放松,使得用户的肢体部位得到放松。这样,该紧固装置能够根据用户的助行需求,自适应的对绑缚部件进行紧固或者放松,能够保证助力系统发挥高效的助力效果,同时满足用户对穿戴舒适的需求。
16、另外,由于该绑缚部件与用户肢体间的松紧程度可以调节,用户穿戴上紧固装置之后,紧固装置在用户运动过程中可以稳定绑缚于用户肢体上而不会移位。因此用户在穿戴过程中只需穿戴于人体关节的粗略位置即可,无需十分准确定位与紧固绑缚,减少了用户不断调整绑缚部件绑缚位置的过程,从而简化用户穿戴步骤。
17、结合第一方面,在第一方面的某些实现方式中,控制单元还可以用于获取用户的运动数据,并根据用户的运动数据确定用户的运动情况。其中,用户的运动数据包括加速度在三个相互垂直的方向上的分量,这里所说的加速度包括重力加速度和用户的肢体在运动过程中产生的加速度。
18、可选地,紧固装置还包括传感器单元,传感器单元用于对用户的运动数据进行检测,也就是说,控制单元获取的运动数据是由传感器单元检测得到的用户的运动数据,传感器单元可以布置在控制单元内部,也可布置在控制单元外部。
19、可选地,传感器单元可以包括惯性传感器,惯性传感器用来检测重力加速度和用户的肢体在运动过程中产生的加速度在三个相互垂直的方向上的分量,其中,三个相互垂直的方向是惯性传感器本身定义的。
20、例如:惯性传感器可以检测重力加速度和用户的肢体在运动过程中产生的加速度在x、y、z轴三个维度上的分量,控制单元进而根据惯性传感器检测的加速度在x、y、z轴三个维度上的分量确定用户的运动情况。其中,x、y、z轴互相垂直。
21、应理解,控制单元根据惯性传感器检测的加速度在x、y、z轴三个维度上的分量包括重力加速度和用户的肢体在运动过程中产生的加速度在x、y、z轴三个维度上的分量的和。
22、应理解,由于用户在运动过程中会造成三个相互垂直的方向相对于重力方向发生变化,因此,重力加速度和用户的肢体在运动过程中产生的加速度在三个相互垂直的方向上的分量也会发生变化,另外,重力加速度和用户的肢体在运动过程中产生的加速度发生变化时,其在三个相互垂直的方向上的分量也会发生变化。
23、可选地,控制单元用来确定用户的运动情况可以为:控制单元以传感器检测的用户的运动数据作为输入,依次对用户的运动数据进行数据预处理、特征提取、规则或机器学习模型预测,进而输出用户的运动场景、运动相位和运动意图中的一项或者多项。
24、本技术实施例中,控制单元获取传感器单元所检测的用户的运动数据,再根据用户的运动数据确定用户的运动场景、运动相位和运动意图中的一项或者多项,例如,当控制单元根据惯性传感器检测到的加速度在三个相互垂直的方向上的分量数据确定用户所处于的运动相位为用户需要助力的运动相位时,控制单元控制记忆合金收缩,以实现助力系统的高效助力,反之,当控制单元根据惯性传感器检测到的用户的重力加速度在三个相互垂直的方向上的分量数据确定用户所处于的运动相位为用户不需要助力的运动相位时,控制单元控制记忆合金伸长,使得用户的肢体部位得到放松。这样,该紧固装置能够更好的根据用户的助行需求,自适应的对绑缚部件进行紧固或者放松,能够保证助力系统发挥高效的助力效果,同时满足用户对穿戴舒适的需求。
25、并且,本技术实施例中,传感器单元检测的用户的运动数据为加速度在三个相互垂直的方向上的分量,也就是说,传感器检测的用户的运动数据是重力加速度和用户的肢体在运动过程中产生的加速度在三个相互垂直的方向上的分量。这样,传感器单元直接检测用户肢体的运动数据,控制单元不需要根据用户的肌肉情况分析用户的运动情况,而是能够直接根据用户肢体的运动数据准确得出用户实际的运动情况,这有助于准确识别用户的实际助力需求。
26、应理解,用户需要助力的运动相位和不需要助力的运动相位可以为用户预先设置的,也可以是用户在运动过程中调整确认的,还可以是系统默认的,还可以是系统根据用户的运动情况随时调整的,本技术对此不作限定。
27、结合第一方面,在第一方面的某些实现方式中,控制单元控制记忆合金的收缩或者伸长的具体方法为:当用户处于第一运动相位时,控制单元控制记忆合金收缩,以为用户提供助力;当用户处于第二运动相位时,控制单元控制记忆合金伸长,以不向用户提供助力。
28、本技术实施例中,将用户需要助力的相位和不需要助力的相位进行划分,例如当紧固装置应用于用户行走过程中的助力时,控制单元以用户在步态周期内各个相位阶段的做功变化为依据,确定用户需要助力系统助力的相位。控制单元在需要助力的相位阶段控制记忆合金收缩,进而实现绑缚部件的紧固,使得绑缚部件紧贴着用户的肌肉曲线,确保在助力过程中施力点不发生偏移,保证助力系统能够发挥高效的助力效果。而在其他步态周期阶段,控制单元控制记忆合金伸长,实现绑缚部件的放松,降低绑缚部件对用户肌肉挤压的不舒适感。这样能够使得绑缚部件根据用户的实际需求更加有针对性地进行收缩和放松,从而更好地兼顾用户对穿戴舒适性与高效助力的需求,提升用户体验。
29、结合第一方面,在第一方面的某些实现方式中,控制单元控制记忆合金的收缩或者伸长的具体实现方式为:控制单元先根据用户的运动情况确定施加于记忆合金上的电压,然后再控制将电压施加于记忆合金上,以调整记忆合金的长度。
30、应理解,控制单元确定的施加于记忆合金上的电压值,是基于用户在上一个运动情况对应的电压值进行调整后的电压值,调整后的电压值与用户当前的运动情况相对应。
31、本技术实施例中,控制单元通过控制施加在记忆合金两端的电压,进而控制记忆合金的收缩或者伸长。例如当控制单元检测到用户需要助力时,减小施加在记忆合金两端的电压,使得记忆合金的温度下降,记忆合金散热收缩,进而实现绑缚部件的紧固,使得绑缚部件紧贴着用户的肌肉曲线,确保在助力过程中施力点不发生偏移,保证助力系统发挥高效的助力效果。当控制单元检测到用户不需要助力时,增加施加在记忆合金两端的电压,使得记忆合金的温度上升,记忆合金受热伸长,进而实现绑缚部件的放松,使得用户在此阶段得到放松,能够实现对绑缚部件的松紧程度的灵活控制。
32、结合第一方面,在第一方面的某些实现方式中,控制单元还可以用于:当用户处于休息场景时,控制记忆合金周期性收缩和伸长,以为用户额外提供按摩的服务。
33、可选地,控制单元用于在控制记忆合金收缩和/或伸长之前,先检测用户是否处于休息场景,当确定用户处于休息场景时,控制记忆合金周期性收缩和伸长。
34、可选地,紧固装置还包括传感器单元。其中,传感器单元包括惯性传感器,惯性传感器检测重力加速度和用户的肢体在运动过程中产生的加速度在x、y、z轴三个维度上的分量等运动数据,并发送给控制单元,当控制单元根据接收到的运动数据识别到加速度在x、y、z轴三个维度上的分量波动较小(如10秒时间窗内的方差<10%×行走过程方差),且用户处于非站立状态(如通过y轴的加速度分量判断知ay>0.8g)时,控制单元确定用户处于休息场景。
35、应理解,控制单元根据惯性传感器检测的加速度在x、y、z轴三个维度上的分量包括重力加速度和用户的肢体在运动过程中产生的加速度在x、y、z轴三个维度上的分量的和。
36、可选地,用户还可以手动确认当前处于休息场景。
37、本技术实施例中,当用户处于休息场景时,控制单元控制记忆合金进行不同周期、不同松紧程度的收缩或者伸长,进而实现绑缚部件的不同周期、不同松紧程度的收缩或者放松。这样可以为用户额外提供一种放松和按摩功能,有助于提高用户的使用体验。
38、结合第一方面,在第一方面的某些实现方式中,控制单元还可以用于:在用户穿戴绑缚部件之前,控制对记忆合金预加电压。
39、可选地,在控制单元控制对记忆合金预加电压之前,用户进行紧固装置的开机初始化,预加电压操作为紧固装置开机初始化之后的默认操作。
40、可选地,用户可以手动确认即将穿戴紧固装置,进而控制单元控制对记忆合金预加电压。
41、本技术实施例中,在用户穿戴绑缚部件之前,控制单元控制对记忆合金预加电压,使得记忆合金伸长。用户在穿戴时,仅需将少量绑缚、外层固定装置穿戴于人体关节的粗略位置,无需十分准确地定位与紧固绑缚,使得用户穿戴更方便,能够简化用户的穿戴步骤。
42、结合第一方面,在第一方面的某些实现方式中,绑缚部件还包括隔热层。记忆合金分布于隔热层中,该隔热层用于记忆合金与用户之间的隔热。
43、本技术实施例中,记忆合金在电压的调节作用下收缩或者伸长,该过程会产生热量,将记忆合金布设于隔热层中,能够防止记忆合金产生的热量对用户的肢体造成伤害。
44、结合第一方面,在第一方面的某些实现方式中,绑缚部件用于绑缚于用户的膝关节处。
45、第二方面,提供了一种紧固方法,该方法应用于紧固装置,该紧固装置包括控制单元和绑缚部件,其中,绑缚部件中布设有记忆合金,该紧固方法包括:控制单元先确定用户的运动情况,再根据用户的运动情况控制记忆合金的收缩或者伸长,以控制绑缚部件与用户的肢体之间的松紧程度。其中,用户的运动情况包括用户的运动场景、运动相位和运动意图中的至少一项。
46、可选地,用户的运动场景包括走路场景、跑步场景、上下楼梯场景、登山场景、滑冰场景、游泳场景、休息场景中的任意一项。
47、可选地,用户处于休息场景包括用户处于坐场景、卧场景等非站立场景。
48、可选地,用户的运动相位包括第一运动相位和第二运动相位,第一运动相位包括承重反应期或支撑相中期,第二运动相位包括首次触地期、支撑相末期、摆动前期、摆动相中的至少一种。
49、应理解,第一运动相位包括承重反应期或支撑相中期,具体是指:第一运动相位可以包括承重反应期和支撑相中期,也可以只包括承重反应期和支撑相中期中的任一项。
50、应理解,用户所处的运动相位是指用户所处的步态相位。
51、可选地,控制单元包括运动相位识别模块,该运动相位识别模块用于对用户的各个步态相位的识别。当识别到用户的步态相位为承重反应期或支撑相中期时,确定用户处于第一运动相位,当识别到用户的步态相位为首次触地期、支撑相末期、摆动前期、摆动相中的任意一种时,确定用户处于第二运动相位。
52、应理解,第一运动相位为用户需要助力的运动相位,第二运动相位为用户不需要助力的运动相位。第一运动相位和第二运动相位的划分是以用户在步态周期内各个相位阶段的做功变化为依据的。此外,用户还可以根据实际助力需求划分第一运动相位和第二运动相位,本技术对此不做限定。
53、应理解,用户需要助力的情况是指用户靠自身做功完成运动比较困难或者特别困难的情况,用户不需要助力的情况是指用户靠自身做功可以轻松完成运动的情况。
54、示例性的,当用户的关节做功大于或等于第一阈值时,用户需要助力;当用户的关节做功小于第一阈值时,用户不需要助力,该第一阈值是用户根据自身情况预先设置的,或者是紧固装置根据用户的使用记录确定的,本技术对此不做限定。
55、可选地,用户的运动意图用于指示用户即将处于的运动场景和/或用户即将处于的运动相位。
56、可选地,控制单元可以是微处理器。
57、本技术实施例中,绑缚部件中布设有记忆合金,控制单元能够根据用户的运动情况控制记忆合金的收缩或者伸长,进而实现紧固装置的收缩或者放松。这样当用户将绑缚部件绑缚于肢体部位后,可以实现对绑缚部件与用户的肢体之间的松紧程度的调节。例如在需要较好的绑缚有效性时,可以使绑缚部件与用户肢体之间的绑缚力大些,在需要较高的穿戴舒适性时,可以使绑缚部件与用户肢体之间的绑缚力小些,从而兼顾用户对穿戴舒适性与绑缚有效性的需求。
58、例如,当紧固装置用于为用户提供助力时,当控制单元根据用户的运动情况确定用户需要助力时,控制单元可以控制记忆合金收缩,使得绑缚部件紧贴着用户的肌肉曲线,确保在助力过程中施力点不发生偏移,以实现助力系统的高效助力。当控制单元根据用户的运动情况确定用户不需要助力时,控制单元可以控制记忆合金伸长,实现绑缚部件的放松,使得用户的肢体部位得到放松。这样,该紧固装置能够根据用户的助行需求,自适应的对绑缚部件进行紧固或者放松,能够保证助力系统发挥高效的助力效果,同时满足用户对穿戴舒适的需求。
59、另外,由于该绑缚部件与用户肢体间的松紧程度可以调节,用户穿戴上紧固装置之后,紧固装置在用户运动过程中可以稳定绑缚于用户肢体上而不会移位。因此用户在穿戴过程中只需穿戴于人体关节的粗略位置即可,无需十分准确定位与紧固绑缚,减少了用户不断调整绑缚部件绑缚位置的过程,从而简化用户穿戴步骤。
60、结合第二方面,在第二方面的某些实现方式中,控制单元确定用户的运动情况的具体方式可以为:控制单元先获取用户的运动数据,再根据用户的运动数据确定用户的运动情况。其中,用户的运动数据包括加速度在三个相互垂直的方向上的分量。
61、可选地,紧固装置还包括传感器单元,该传感器单元用于对用户的运动数据进行检测,也就是说,控制单元获取的用户的运动数据为传感器单元检测得到的,其中,该传感器单元的布置可以是位于控制单元内部,也可以是位于控制单元外部。
62、可选地,传感器单元包括惯性传感器,该惯性传感器检测重力加速度和用户的肢体在运动过程中产生的加速度在三个相互垂直的方向上的分量,例如:惯性传感器检测重力加速度和用户的肢体在运动过程中产生的加速度在x、y、z轴三个维度上的分量,其中,x、y、z轴的方向相互垂直。另外,三个相互垂直的方向是惯性传感器本身定义的。
63、应理解,由于用户在运动过程中会造成三个相互垂直的方向相对于重力方向发生变化,因此,重力加速度和/或用户的肢体在运动过程中产生的加速度在三个相互垂直的方向上的分量也会发生变化,另外,重力加速度和/或用户的肢体在运动过程中产生的加速度发生变化时,其在三个相互垂直的方向上的分量也会发生变化。
64、可选地,用户的控制单元确定用户的运动情况的具体实现方式可以为:控制单元以用户的运动数据作为输入,依次对用户的运动数据进行数据预处理、特征提取、规则或机器学习模型预测,进而输出用户的运动场景、运动相位和运动意图中的一项或者多项。
65、本技术实施例中,控制单元获取传感器单元所检测的用户的运动数据,再根据用户的运动数据确定用户的运动场景、运动相位和运动意图中的一项或者多项,例如,当控制单元根据惯性传感器检测到的用户的重力加速度在三个相互垂直的方向上的分量数据确定用户所处于的运动相位为用户确认的需要助力的运动相位时,控制单元控制记忆合金收缩,以实现助力系统的高效助力,反之,当控制单元根据惯性传感器检测到的用户的重力加速度在三个相互垂直的方向上的分量数据确定用户所处于的运动相位为用户确认的不需要助力的运动相位时,控制单元控制记忆合金伸长,使得用户的肢体部位得到放松。这样,该紧固装置能够更好的根据用户的助行需求,自适应的对绑缚部件进行紧固或者放松,能够保证助力系统发挥高效的助力效果,同时满足用户对穿戴舒适的需求。
66、应理解,控制单元根据惯性传感器检测的加速度在x、y、z轴三个维度上的分量包括重力加速度和用户的肢体在运动过程中产生的加速度在x、y、z轴三个维度上的分量的和。
67、并且,本技术实施例中,传感器单元检测的用户的运动数据为加速度在三个相互垂直的方向上的分量,也就是说,传感器检测的用户的运动数据包括重力加速度和用户的肢体在运动过程中产生的加速度在三个相互垂直的方向上的分量。这样,传感器单元直接检测用户肢体的运动数据,控制单元不需要根据用户的肌肉情况分析用户的运动情况,而是能够直接根据用户肢体的运动数据准确得出用户实际的运动情况,这有助于准确识别用户的实际助力需求。
68、应理解,用户确认的需要助力的运动相位和不需要助力的运动相位可以为用户预先设置的,也可以是用户在运动过程中调整确认的,还可以是系统默认的,还可以是系统根据用户的运动情况随时调整的,本技术对此不作限定。
69、结合第二方面,在第二方面的某些实现方式中,控制单元根据用户的运动情况控制记忆合金的收缩或者伸长,具体的控制方式可以为:当用户处于第一运动相位时,控制单元控制记忆合金收缩,以向用户提供助力;当用户处于第二运动相位时,控制单元控制记忆合金伸长,以不向用户提供助力。
70、本技术实施例中,将用户需要助力的相位和不需要助力的相位进行划分,例如当紧固装置应用于用户行走过程中的助力时,控制单元以用户在步态周期内各个相位阶段的做功变化为依据,确定用户需要助力系统助力的相位。控制单元在需要助力的相位阶段控制记忆合金收缩,进而实现绑缚部件的紧固,使得绑缚部件紧贴着用户的肌肉曲线,确保在助力过程中施力点不发生偏移,保证助力系统能够发挥高效的助力效果。而在其他步态周期阶段,控制单元控制记忆合金伸长,实现绑缚部件的放松,降低绑缚部件对用户肌肉挤压的不舒适感。这样能够使得绑缚部件根据用户的实际需求更加有针对性地进行收缩和放松,从而更好地兼顾用户对穿戴舒适性与高效助力的需求,提升用户体验。
71、结合第二方面,在第二方面的某些实现方式中,控制单元根据用户的运动情况控制记忆合金的收缩或者伸长,具体的实现方式为:控制单元先根据用户的运动情况确定施加于记忆合金上的电压,再控制将所确定的电压施加于记忆合金上,以调整记忆合金的长度。
72、应理解,控制单元确定的施加于记忆合金上的电压值,是基于用户在上一个运动情况对应的电压值进行调整后的电压值,调整后的电压值与用户当前的运动情况相对应。
73、本技术实施例中,控制单元通过控制施加在记忆合金两端的电压,进而实现控制记忆合金的收缩或者伸长。例如当控制单元确定用户需要助力时,减小施加在记忆合金两端的电压,使得记忆合金的温度下降,记忆合金收缩,进而实现绑缚部件的紧固,使得绑缚部件紧贴着用户的肌肉曲线,确保在助力过程中施力点不发生偏移,保证助力系统发挥高效的助力效果。当控制单元确定用户不需要助力时,增加施加在记忆合金两端的电压,使得记忆合金的温度上升,记忆合金伸长,进而实现绑缚部件的放松,使得用户在此阶段得到放松。这样能够实现对绑缚部件的松紧程度的灵活控制。
74、结合第二方面,在第二方面的某些实现方式中,紧固方法还包括:当用户处于休息场景时,控制单元控制记忆合金周期性收缩和伸长。
75、可选地,控制单元在控制记忆合金收缩和/或伸长之前,先检测用户是否处于休息场景,当确定用户处于休息场景时,控制记忆合金周期性收缩和伸长。
76、可选地,紧固装置还包括传感器单元。其中,传感器单元包括惯性传感器,惯性传感器检测重力加速度和用户的肢体在运动过程中产生的加速度在x、y、z轴三个维度上的分量等运动数据,并发送给控制单元,当控制单元根据接收到的运动数据识别到用户的加速度在x、y、z轴三个维度上的分量波动较小(如10秒时间窗内的方差<10%×行走过程方差),且用户处于非站立状态(如通过y轴的加速度分量判断知ay>0.8g)时,控制单元确定用户处于休息场景。
77、可选地,用户还可以手动确认当前处于休息场景。
78、本技术实施例中,当控制单元确定用户处于休息场景时,控制单元控制记忆合金进行不同周期、不同松紧程度的收缩或者伸长,进而实现绑缚部件的不同周期、不同松紧程度的收缩或者放松。这样可以为用户额外提供一种放松和按摩功能,有助于提高用户的使用体验。
79、结合第二方面,在第二方面的某些实现方式中,紧固方法还包括:在用户穿戴绑缚部件之前,控制单元控制对记忆合金预加电压。
80、可选地,在控制单元控制对记忆合金预加电压之前,用户进行紧固装置的开机初始化,预加电压操作为紧固装置开机初始化之后的默认操作。
81、可选地,用户可以手动确认即将穿戴紧固装置,进而控制单元控制对记忆合金预加电压。
82、本技术实施例中,在用户穿戴绑缚部件之前,控制单元控制对记忆合金预加电压,使得记忆合金伸长。用户在穿戴时,仅需将少量绑缚、外层固定装置穿戴于人体关节的粗略位置,无需十分准确定位与紧固绑缚,使得用户穿戴更方便,能够简化用户的穿戴步骤。
83、第三方面,提供了一种计算机可读介质,其上存储有计算机程序,该计算机程序被计算机执行时实现第二方面及其可能实现方式中的方法。
84、第四方面,提供一种计算机程序产品,该计算机程序产品被计算机执行时实现第二方面及其可能实现方式中的方法。
85、第五方面,提供一种芯片,该芯片包括处理器与数据接口,该处理器通过数据接口读取存储器上存储的指令,以执行第二方面及其可能实现方式中的方法。
86、第六方面,提供一种可穿戴装置,该可穿戴装置包括第一方面及其可能实现方式中的装置和助力系统,助力系统用于为用户提供助力。
87、应理解,紧固装置用于在助力系统为用户提供助力之前,使得绑缚部件与用户的肌肉贴合。
- 还没有人留言评论。精彩留言会获得点赞!