一种基于Gazebo的抓取仿真方法与流程
本发明属于工业视觉分拣领域,具体涉及一种基于gazebo的抓取仿真方法。
背景技术:
1、在通过工业视觉对乱序堆叠的工件进行分拣的任务中,在抓取环节,需要保证机器人在抓取工件移动的过程中,工件不会从夹爪中掉落。为了选择出稳定性较高的抓取位姿,就需要提前对一些可行的抓取位姿进行测试与评估。传统方法在测试评估中需要在实际场景中操控机器人对工件进行抓取,这种方法效率较低,同时因为在实际场景中无法准确获得目标工件的位姿,抓取的复现性较差,无法对同一抓取位姿进行多次测试。另一种方法是根据夹爪与物体的几何特征计算抓取可靠性,但是由于实际场景中物体还存在摩擦力,质量等物理参数,单独依赖几何特征进行计算会产生一定的偏差。
2、近些年来,随着仿真软件平台的不断发展,物理仿真被应用在许多工业领域。在仿真平台中,通过导入目标工件与夹爪的模型,并设置夹爪、工件的物理参数,可以获得接近真实场景的仿真结果。同时在仿真中可以设置抓取位姿参数,并使用多组夹爪模型同时进行抓取仿真,从而获得更好的可重复性和更高的仿真效率。同时,也不必担心在抓取过程中的碰撞导致机器人或工件的损坏。
技术实现思路
1、为解决现有技术的问题,本发明专利提供了一种基于gazebo的抓取仿真方法,能够获取抓取稳定性的信息,能在软件中能够直接设置物体的位姿。
2、一种基于gazebo的抓取仿真方法,包括以下步骤:
3、s1、建模:在三维建模仿真平台中对夹爪和目标抓取物体的三维模型进行建模,分别生成物体表面点云和夹爪点云;
4、s2、设置仿真过程中的物理参数:在三维建模仿真平台中设置抓取仿真中的相关物理参数;
5、s3、导入模型:在三维建模仿真平台中导入夹爪和待抓取目标物体的点云模型;
6、s4、仿真抓取:在三维建模仿真平台中设定目标物体上的待抓取点以及待仿真的抓取轨迹;控制夹爪靠近并抓取目标物体,验证抓取是否有效并获取有效的抓取轨迹和位姿。
7、所述对夹爪和目标抓取物体进行三维模型建模,包括:基本形状建模和模型网格重构;
8、所述基本形状建模为,构建一个与目标物体几何形状相同的仿真模型;
9、所述模型网格重构为,对模型进行网格重构,用于将目标物体交接表面的不连续的棱角转换为连续的曲面,并使得模型表面点分布均匀化。
10、所述设置仿真过程中的物理参数,包括依照目标物体实际尺寸设置表面摩擦力,夹爪闭合力度,物体的质量,转动惯量。
11、所述s4仿真抓取包括:
12、s41、对物体表面点云进行采样,选取目标物体上的待抓取点;
13、s42、确定夹爪靠近目标物体的方向和夹爪闭合方向,作为抓取轨迹;
14、s43、控制夹爪靠近待抓取物体,直到与待抓取目标物体的点云发生碰撞为止,控制夹爪闭合;
15、s44、检测夹爪闭合的区域内是否存在物体点云,若有则判定为有效抓取采样,否则是无效抓取采样;
16、s45、记录有效抓取采样的待抓取目标物体与夹爪的相对位姿为当前生成的抓取位姿。
17、所述对目标物体表面点云进行采样的间隔为1mm选取一个待抓取点。
18、所述确定夹爪靠近目标物体的方向和夹爪闭合方向,包括:
19、根据待抓取点邻域范围内的曲面求取待抓取点位置的法线方向和最小曲率半径对应的切线方向;其中,法线方向作为夹爪靠近物体的方向,切线方向作为夹爪闭合的方向。
20、本发明具有以下有益效果及优点:
21、使用抓取仿真软件进行模拟抓取,能够获取抓取稳定性的信息,相比于使用机器人进行实际抓取的方法,具有更快的速度和更低的成本,同时在软件中能够直接设置物体的位姿,相比于手动重复摆放物体,具有更好的可重复性,能够对同一抓取姿态进行多次仿真测试。
技术特征:
1.一种基于gazebo的抓取仿真方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种基于gazebo的抓取仿真方法,其特征在于,所述对夹爪和目标抓取物体进行三维模型建模,包括:基本形状建模和模型网格重构;
3.根据权利要求1所述的一种基于gazebo的抓取仿真方法,其特征在于,所述设置仿真过程中的物理参数,包括依照目标物体实际尺寸设置表面摩擦力,夹爪闭合力度,物体的质量,转动惯量。
4.根据权利要求1所述的一种基于gazebo的抓取仿真方法,其特征在于,所述s4仿真抓取包括:
5.根据权利要求4所述的一种基于gazebo的抓取仿真方法,其特征在于,所述对目标物体表面点云进行采样的间隔为1mm选取一个待抓取点。
6.根据权利要求4所述的一种基于gazebo的抓取仿真方法,其特征在于,所述确定夹爪靠近目标物体的方向和夹爪闭合方向,包括:
技术总结
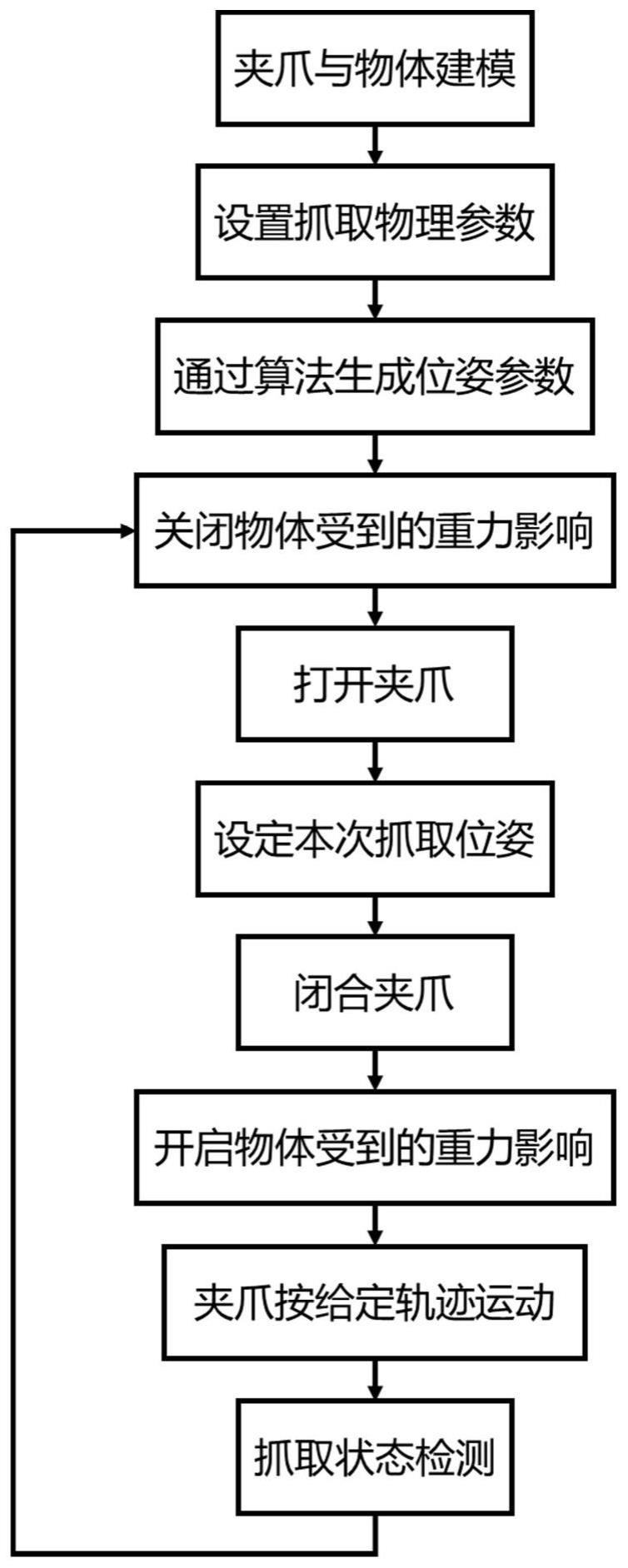
本发明公开了一种基于Gazebo的抓取仿真方法,其中,方法包括:根据实际中机器人的夹爪以及待抓取物体参数在仿真环境中建立夹爪与待抓取物体的几何模型并设定相关物理参数;使用抓取生成算法生成待抓取物体的抓取的位姿参数;关闭待抓取物体模型受到的重力影响设定待抓取物体相对于夹爪的抓取位姿;设定夹爪的闭合参数,包括夹爪闭合的力参数,闭合夹爪;开启待抓取物体模型受到的重力影响;夹爪按给定轨迹做出平移旋转等运动;检测待抓取物体是否是被抓取的状态,获取该抓取位姿的抓取结果。本发明通过抓取仿真平台获取在某一特定位姿下的抓取稳定性。相比于使用实际机器人进行抓取测试,具有更快的速度和更低的成本,更加便捷,高效。
技术研发人员:王晓峰,邹风山,梁亮,孙铭泽,刘世昌,宋吉来
受保护的技术使用者:山东新松工业软件研究院股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!