用于电缆管道的狭小廊道巡检机器人的制作方法
1.本发明涉及电力电子设备技术领域,具体为用于电缆管道的狭小廊道巡检机器人。
背景技术:
2.随着社会发展,电力电缆与架空线路相比,凭借其占地少、可靠性高、维护工作量小等优点,在输电线路中占比越来越高。电力电缆通道的巡视与维护对于电力电缆安全运行尤为重要,对于保障电力系统的安全运行具有重大意义。由于不同时期出于不同的考虑,对于电力电缆通道修建的标准也不尽相同。一是部分老旧电缆廊道空间较小,电缆敷设拥挤、混乱,作人员有触电风险;二是部分老旧电缆廊道爬梯生锈腐蚀,工作人员有高处坠落风险;二是部分工作井修建不符合现在标准,无爬梯,工作人员需搬绝缘梯上下,严重影响工作效率;三是夏季电缆通道比较潮湿,有害气体增加,工作人员有毒气体伤害风险增加。
3.现有电力电缆通道巡视方法主要有两种:一是人工巡视,即工作人员携带巡视设备进行巡视;二是成套巡视设备,即在电力电缆通道内架设专门轨道,在轨道上安装巡视装置,实现对特定通道无人巡视。
4.人工巡视常用巡视设备有红外线成像仪和数码照相机,两种设备均为直接手持式,仅凭人体手臂距离不能够将其置于电力电缆工作井下,巡视人员必须进入到电力电缆工作井内才能进行电力电缆通道巡视工作。
技术实现要素:
5.本发明针对上述现有技术存在的不足,提供用于电缆管道的狭小廊道巡检机器人。
6.为了解决上述技术问题,本发明提供了如下的技术方案:
7.用于电缆管道的狭小廊道巡检机器人,包括:
8.支撑控制装置,用于在电缆管道内部进行支撑控制,包括支撑底座和控制装置,所述控制装置设置于支撑底座内部;
9.水平往复驱动装置,用于带动伸缩装置和清障装置水平移动;
10.伸缩装置,与水平往复驱动装置垂直连接且用于带动清障装置上下移动;
11.清障装置,旋转设置于伸缩装置上用于对电缆表面的障碍物进行清除;
12.摄像装置,设置于伸缩装置的端部用于对电缆管道进行图像采集;
13.所述支撑控制装置通过万能接头连接水平往复驱动装置,所述水平往复驱动装置上设置伸缩装置且伸缩装置与水平往复驱动装置垂直,所述伸缩装置上设置清障装置且清障装置绕伸缩装置水平旋转,所述清障装置的端部设置摄像装置。
14.作为本发明的进一步技术方案为,所述控制装置包括控制器、电池、存储模块、通讯模块、温度传感器、湿度传感器、气体检测仪和照明灯;所述支撑底座包括壳体,所述壳体的底部设置固定件,所述固定件上设置支撑架,所述壳体上设置照明灯、温度传感器、湿度
传感器和气体检测仪;所述温度传感器、湿度传感器、气体检测仪的输出端连接控制器,所述控制器与存储模块和通讯模块连接;所述电池的输出端连接控制器、照明灯、水平往复驱动装置、伸缩装置、清障装置和摄像装置。
15.作为本发明的进一步技术方案为,所述水平往复驱动装置包括支撑平板、水平驱动步进电机、水平往复轨道和转动齿轮,所述支撑平板内部为空腔结构,且空腔结构的内壁设置齿轮槽,所述齿轮槽上设置转动齿轮,所述转动齿轮与水平驱动步进电机的输出端连接,所述支撑平板的底部设置通孔槽,所述转动齿轮的转动轴上设置支撑连杆且支撑连杆与转动轴垂直设置,所述支撑连杆穿过通孔槽与伸缩装置垂直连接。
16.作为本发明的进一步技术方案为,所述伸缩装置包括液压气缸、第一伸缩臂和第二伸缩臂,所述第一伸缩臂设置于第二伸缩臂的外侧且第一伸缩臂与液压气缸连接,所述第二伸缩臂与第一伸缩臂连接的一端设置密封活塞,所述第二伸缩臂的端部与清障装置连接。
17.作为本发明的进一步技术方案为,所述清障装置包括转动轴、转动电机和清障手臂,所述转动电机的输出端连接转动轴,所述转动轴上固定清障手臂且转动轴与清障手臂垂直连接,所述清障手臂为水平设置。
18.作为本发明的进一步技术方案为,所述万能接头包括第一连接件和第二连接件,所述第一连接件与支撑控制装置连接,所述第二连接件与水平往复驱动装置连接,所述第一连接件上设置凸台,所述凸台为中空结构且凸台的端部设置卡槽,所述第二连接件的端部设置与凸台配合的凹槽,所述凹槽内部设置用于与卡槽安装的凸块。
19.作为本发明的进一步技术方案为,所述支撑底座设置凹槽,且凹槽的两侧设置与轨道卡接的卡槽。
20.作为本发明的进一步技术方案为,所述支撑底座的下方设置轮胎,所述轮胎为履带结构。
21.作为本发明的进一步技术方案为,所述清障手臂为绝缘杆,所述绝缘杆的端部设置毛刷。
22.作为本发明的进一步技术方案为,所述摄像装置为270度可旋转摄像头。
23.本发明的有益效果是:
24.1、本发明中水平往复驱动装置设置在支撑控制装置上,在支撑控制装置上驱动伸缩装置和清障装置水平移动,这样可对电缆管道两侧排布的电缆进行障碍物或异物清扫,伸缩装置用于带动清障装置上下移动,对于敷设多层电缆的电缆管道;
25.2、本发明通过伸缩装置调节清障装置的高度,对不同层的电缆进行清理。
26.3、本发明通过在伸缩装置的端部设置摄像装置,对电缆管道内部的图像进行获取,摄像装置转动并聚焦异常点,进行图像放大拍照获取放大图像,为监控平台进一步分析提供依据。
27.4、本发明支撑平板起到固定支撑的作用,在支撑平板内设置齿轮槽,转动齿轮在水平驱动步进电机的驱动下转动,带动伸缩装置水平移动。
28.5、本发明通过设置温度传感器和湿度传感器对电缆管道内部的温度和湿度进行检测,气体检测仪用于对电缆管道内部的瓦斯气体、co2、sf6等有害气体进行浓度监测,并通过控制器和通讯模块传输至监控平台。
29.6、本发明可实现巡检机器人的自动巡检控制检测,适用于狭小廊道及电缆管道内部使用,可实现无线数据传输及存储。
附图说明
30.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
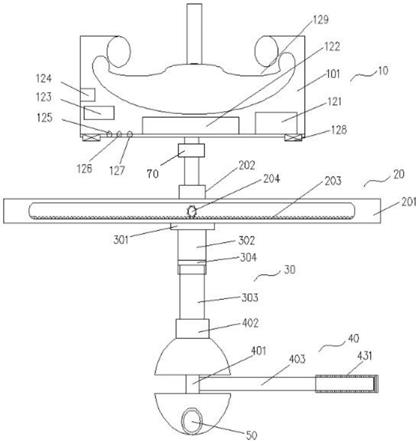
31.图1为本发明提供的用于电缆管道的狭小廊道巡检机器人结构图;
32.图2为本发明提出的所述支撑平板局部结构图;
33.图3为本发明提出的用于电缆管道的狭小廊道巡检机器人控制结构图;
34.图4为本发明提出的第一连接件放大结构图;
35.图5为本发明提出的第二连接件放大结构图;
36.图6为本发明提出的第二连接件剖视图;
37.图7为本发明提供的另一具体实施例结构图;
38.图中所示:
39.10-支撑控制装置,20-水平往复驱动装置,30-伸缩装置,40-清障装置, 50-摄像装置,60-轮胎,70-万能接头;
40.101-支撑底座,102控制装置;
41.121-控制器,122-电池,123-存储模块,124-通讯模块,125-温度传感器,126-湿度传感器,127-气体检测仪,128-照明灯,129-凹槽;
42.201-支撑平板,202-水平驱动步进电机、203-水平往复轨道,204-转动齿轮;
43.211-齿轮槽,212-通孔槽,241-转动轴;
44.301-液压气缸,302-第一伸缩臂,303-第二伸缩臂,304-密封活塞;
45.401-转动轴,402-转动电机,403-清障手臂,431-毛刷;
46.701-第一连接件,702-第二连接件,711-凸台,712-卡槽,721-凹槽, 722-凸块。
具体实施方式
47.以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
48.如图1至图6所示,本发明提供用于电缆管道的狭小廊道巡检机器人,包括:
49.支撑控制装置10,用于在电缆管道内部进行支撑控制,包括支撑底101 和控制装置102,所述控制装置102设置于支撑底座101内部;
50.水平往复驱动装置20,用于带动伸缩装置30和清障装置40水平移动;
51.伸缩装置30,与水平往复驱动装置20垂直连接且用于带动清障装置 40上下移动;
52.清障装置40,旋转设置于伸缩装置30上用于对电缆表面的障碍物进行清除;
53.摄像装置50,设置于伸缩装置30的端部用于对电缆管道进行图像采集;
54.所述支撑控制装置10通过万能接头70连接水平往复驱动装置20,所述水平往复驱动装置20上设置伸缩装置30且伸缩装置30与水平往复驱动装置20垂直,所述伸缩装置30上设置清障装置40且清障装置40绕伸缩装置30水平旋转,所述清障装置40的端部设置摄像装置50。
55.水平往复驱动装置设置在支撑控制装置上,通过设置万能接头,方便与支撑控制装置的连接,可在支撑控制装置上驱动伸缩装置和清障装置水平移动,这样可对电缆管道两侧排布的电缆进行障碍物或异物清扫,伸缩装置用于带动清障装置上下移动,对于敷设多层电缆的电缆管道,可通过伸缩装置调节清障装置的高度,对不同层的电缆进行清理,清障装置主要用对电缆表面障碍物,包括石块、动物等影响到电缆的物体;清障装置通过来回旋转将障碍物从电缆上清理下来。
56.万能接头70在实现水平往复驱动装置与支撑控制装置的连接时,提供水平和垂直的扭矩力,其中,万能接头70包括第一连接件701和第二连接件702,所述第一连接件701与支撑控制装置连接,所述第二连接件702 与水平往复驱动装置连接,所述第一连接件701上设置凸台711,所述凸台711为中空结构且凸台的端部设置卡槽712,所述第二连接件702的端部设置与凸台711配合的凹槽721,所述凹槽721内部设置用于与卡槽712 安装的凸块722,凸台的外侧设置用于与第二连接件连接的外螺纹。
57.本发明通过在伸缩装置的端部设置摄像装置,对电缆管道内部的图像进行获取,通过存储模块进行存储,并通过通讯模块将获取的图像信息发送至外部或远程监控平台,当远程监控平台检测到有异常点,例如有障碍物或温度过高时,则向巡检机器人发送近距离查看指令,当巡检机器人接收到该指令时,控制摄像装置转动并聚焦异常点,进行图像放大拍照获取放大图像,为监控平台进一步分析提供依据。
58.本发明实施例中,控制装置102包括控制器121、电池122、存储模块123、通讯模块124、温度传感器125、湿度传感器126、气体检测仪127 和照明灯128;所述支撑底座101包括壳体111,所述壳体111的底部设置固定件112,所述固定件112上设置支撑架113,所述壳体111上设置照明灯118、温度传感器115、湿度传感器116和气体检测仪117;所述温度传感器115、湿度传感器116、气体检测仪117的输出端通过模数转换器连接控制器121,所述控制器121与存储模块123和通讯模块124连接;所述电池122的输出端连接控制器121、照明灯128、水平往复驱动装置 20、伸缩装置30、清障装置40和摄像装置50。
59.本发明实施例中,通过设置温度传感器和湿度传感器对电缆管道内部的温度和湿度进行检测,气体检测仪用于对电缆管道内部的瓦斯气体、co2、 sf6等危险气体检查和空气含氧量监测,可通过设置不同气体传感器进行检测,也可以通过集成式的气体测试仪实现,通过控制器和通讯模块传输至监控平台,照明灯设置于支撑底座上,照明灯可根据需要设置多个,至少设置两个,分别位于支撑底座前进方向的侧边,具体根据照明需要选择。
60.本发明实施例中,采用内置电池为巡检机器人供电,支撑底座内部设置电池仓,支撑底座上设置充电接口,电池采用可充电锂离子电池,通过电源转换器将锂离子电池转换为控制器、水平往复驱动装置、伸缩装置、清障装置和摄像装置所需的电压,采用内置电池,不需要外接电源线,不受外部供电的限制,使用方便。
61.本发明实施例中,水平往复驱动装置20包括支撑平板201、水平驱动步进电机202、水平往复轨道203和转动齿轮204,所述支撑平板201内部为空腔结构,且空腔结构的内壁设置齿轮槽211,所述齿轮槽211上设置转动齿轮204,所述转动齿轮204与水平驱动步进电机202的输出端连接,所述支撑平板201的底部设置通孔槽212,所述转动齿轮204的转动轴241上设置支撑连杆205且支撑连杆205与转动轴241垂直设置,所述支撑连杆205穿过通孔槽212与伸缩装置30垂直连接。
62.支撑平板起到固定支撑的作用,在支撑平板内设置齿轮槽,转动齿轮在水平驱动步进电机的驱动下转动,带动伸缩装置水平移动。
63.伸缩装置30包括液压气缸301、第一伸缩臂302和第二伸缩臂303,所述第一伸缩臂302设置于第二伸缩臂303的外侧且第一伸缩臂302与液压气缸301连接,所述第二伸缩臂303与第一伸缩臂302连接的一端设置密封活塞304,所述第二伸缩臂303的端部与清障装置40连接。
64.清障装置40包括转动轴401、转动电机402和清障手臂403,所述转动电机402的输出端连接转动轴401,所述转动轴401上固定清障手臂40 且转动轴401与清障手臂403垂直连接,所述清障手臂403为水平设置。
65.本发明实施例中,水平驱动步进电机、液压气缸和转动电机通过继电器驱动模块与控制器连接。摄像装置为带有云台控制的摄像头,可实现270 度的旋转,通讯模块可连接外部遥控装置,实现无线遥控。
66.本发明实施例中,支撑控制装置用于提供巡检机器人动力和支撑,电缆管道内设置轨道时,则支撑控制装置的支撑底板可根据轨道设置底部连接部件,支撑底座101设置凹槽129,且凹槽129的两侧设置与轨道卡接的卡槽,这样可以使巡检机器人沿已有轨道进行移动,方便操作。
67.本发明实施例中,清障手臂40为绝缘杆,所述绝缘杆的端部设置毛刷 431。通过设置毛刷可对电缆表面进行清扫。
68.摄像装置50为270度可旋转摄像头。可方便对巡检机器人所在的位置进行全方位图像和视频的获取。
69.参见图7,本发明提供的另一实施例为,支撑底座101的下方设置所述支撑底座的下方设置轮胎60,所述轮胎60为履带结构,可穿越部分障碍物。当电缆管道内无轨道时,可通过在支撑控制装置底部设置移动轮,通过驱动移动轮带动巡检机器人移动;对于支撑控制装置的具体结构根据现场施工进行选择,本发明对此不作限制。
70.本发明用于不适用人进入检测的狭小廊道,不仅可以适用于电缆管道,也可以用到其他领域,比如自然水,污水,天然气,等等狭小管道均可适用
71.最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1