一种柔性立式机械抓手的制作方法
1.本实用新型涉及物流机械技术领域,尤其涉及一种柔性立式机械抓手。
背景技术:
2.现有一种管状的缸筒,在抓取转运时一般采用机械手或机械爪从外部抓取,结构简单,但是这种机械手或机械爪在抓取过程中容易损伤缸筒的外表面,造成外观瑕疵。
3.因此本领域技术人员致力于开发一种不会损伤缸筒外表面的柔性立式机械抓手。
技术实现要素:
4.有鉴于现有技术的上述缺陷,本实用新型所要解决的技术问题是提供一种不会损伤缸筒外表面的柔性立式机械抓手。
5.为实现上述目的,本实用新型提供一种柔性立式机械抓手,包括吊架和轴向套接在所述吊架内的滑动柱,所述吊架的表面两侧对称分别固定连接有斜向上延伸的支撑套,所述支撑套内插接有可沿所述支撑套方向滑动的支撑柱,所述支撑柱远离所述吊架的一端设置有轴向延伸的弧面支撑板,所述支撑柱的后端铰接有一连杆的一端,所述连杆的另一端与所述吊架的下端铰接。
6.所述弧面支撑板的表面固定连接有耐磨带。
7.所述吊架上还设置有至少两个对称设置的吊环。
8.所述滑动柱的上端设置有吊挂连接孔。
9.所述支撑套表面设置有滑槽,所述连杆的一端与所述支撑柱的后端之间设置有嵌入所述滑槽的铰轴。
10.本实用新型的有益效果是:本实用新型的柔性立式机械抓手,包括吊架和轴向套接在吊架内的滑动柱,吊架的表面两侧对称分别固定连接有斜向上延伸的支撑套,支撑套内插接有可沿支撑套方向滑动的支撑柱,支撑柱远离吊架的一端设置有轴向延伸的弧面支撑板,支撑柱的后端铰接有一连杆的一端,连杆的另一端与吊架的下端铰接,在使用时,该柔性立式机械抓手伸入缸筒内,提起滑动柱和吊架的上端,滑动柱的下端通过连杆的作用带动支撑柱沿支撑套斜向上撑开,两侧的弧面支撑板撑住缸筒的内侧壁,这样就可将缸筒提起,避免损伤缸筒外侧壁;另外缸筒越重,弧面支撑板的支撑力越大。
附图说明
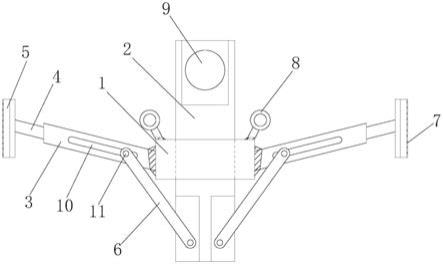
11.图1是本实用新型的结构示意图;
12.图2是本实用新型的结构俯视图。
具体实施方式
13.下面结合附图和实施例对本实用新型作进一步说明,需注意的是,在本实用新型的描述中,术语“上”、“下”、“左”、“右”、“内”、“外”等指示的方位或位置关系为基于附图所
示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方式构造和操作,因此不能理解为对本实用新型的限制。术语“第一”、“第二”、“第三”等仅用于描述目的,而不能理解为指示或暗示相对重要性。
14.如图1、图2所示,一种柔性立式机械抓手,包括吊架1和轴向套接在吊架1内的滑动柱2,吊架1的表面两侧对称分别固定连接有斜向上延伸的支撑套3,支撑套3内插接有可沿支撑套3方向滑动的支撑柱4,支撑柱4远离吊架1的一端设置有轴向延伸的弧面支撑板5,支撑柱4的后端铰接有一连杆6的一端,连杆6的另一端与吊架1的下端铰接,在使用时,该柔性立式机械抓手伸入缸筒内,提起滑动柱和吊架的上端,滑动柱的下端通过连杆的作用带动支撑柱沿支撑套斜向上撑开,两侧的弧面支撑板撑住缸筒的内侧壁,这样就可将缸筒提起,避免损伤缸筒外侧壁;另外缸筒越重,弧面支撑板的支撑力越大。
15.在本实施例中,为了确保缸筒不被划伤和磕碰,弧面支撑板5的表面固定连接有耐磨带7。
16.吊架1上还设置有至少两个对称设置的吊环8,滑动柱2的上端设置有吊挂连接孔9,这样通过两个吊环8和吊挂连接孔9就可以吊挂其整个装置和缸筒。
17.支撑套3表面设置有滑槽10,连杆6的一端与支撑柱4的后端之间设置有嵌入滑槽10的铰轴11,铰轴11沿滑槽10滑动,不会歪斜。
18.本实用新型的工作原理是:
19.在使用时,该柔性立式机械抓手伸入缸筒内,提起滑动柱的上端和吊环8,滑动柱向上移动,带动连杆的下端向上移动,连杆的上端向外推出,推动支撑柱沿支撑套斜向上撑开,位于支撑柱端部的弧面支撑板通过耐磨带7撑住缸筒的内侧壁,这样就可将缸筒提起。
20.以上详细描述了本实用新型的较佳具体实施例。应当理解,本领域的普通技术人员无需创造性劳动就可以根据本实用新型的构思做出诸多修改和变化。因此,凡本技术领域中技术人员依本实用新型的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
技术特征:
1.一种柔性立式机械抓手,其特征在于:包括吊架(1)和轴向套接在所述吊架(1)内的滑动柱(2),所述吊架(1)的表面两侧对称分别固定连接有斜向上延伸的支撑套(3),所述支撑套(3)内插接有可沿所述支撑套(3)方向滑动的支撑柱(4),所述支撑柱(4)远离所述吊架(1)的一端设置有轴向延伸的弧面支撑板(5),所述支撑柱(4)的后端铰接有一连杆(6)的一端,所述连杆(6)的另一端与所述吊架(1)的下端铰接。2.如权利要求1所述的柔性立式机械抓手,其特征在于:所述弧面支撑板(5)的表面固定连接有耐磨带(7)。3.如权利要求1或2所述的柔性立式机械抓手,其特征在于:所述吊架(1)上还设置有至少两个对称设置的吊环(8)。4.如权利要求1或2所述的柔性立式机械抓手,其特征在于:所述滑动柱(2)的上端设置有吊挂连接孔(9)。5.如权利要求1或2所述的柔性立式机械抓手,其特征在于:所述支撑套(3)表面设置有滑槽(10),所述连杆(6)的一端与所述支撑柱(4)的后端之间设置有嵌入所述滑槽(10)的铰轴(11)。
技术总结
本实用新型公开了一种柔性立式机械抓手,包括吊架和轴向套接在吊架内的滑动柱,吊架的表面两侧对称分别固定连接有斜向上延伸的支撑套,支撑套内插接有可沿支撑套方向滑动的支撑柱,支撑柱远离吊架的一端设置有轴向延伸的弧面支撑板,支撑柱的后端铰接有一连杆的一端,连杆的另一端与吊架的下端铰接,在使用时,该柔性立式机械抓手伸入缸筒内,提起滑动柱和吊架的上端,滑动柱的下端通过连杆的作用带动支撑柱沿支撑套斜向上撑开,两侧的弧面支撑板撑住缸筒的内侧壁,这样就可将缸筒提起,避免损伤缸筒外侧壁;另外缸筒越重,弧面支撑板的支撑力越大。支撑力越大。支撑力越大。
技术研发人员:张辉 张喜 段润群 张文兵
受保护的技术使用者:重庆川仪速达机电有限公司
技术研发日:2021.01.28
技术公布日:2021/11/30
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1