一种机器人控制系统设备的制作方法
1.本实用新型涉及机器人技术领域,具体为一种机器人控制系统设备。
背景技术:
2.机器人是一种自动化的机器,与普通机器不同的是机器人具有一定的感知能力,基于现代科技研发的机器人,已经具有高度的灵活性,但大多数的机器人,仍要基于机器人控制设备,需要有人操控才能正常使用;
3.经过分析发现,目前专利申请号201920365471.0的一种机器人控制设备,通过设置整线转盘等一系列结构,实现了便于收纳电源线的效果,使得用电的安全系数得到了提高;
4.但其不足之处在于:整线转盘只能对于电源线的线缆部分进行收卷,对于电源线插头部位则没有进行良好的固定,插头部分的引脚容易与主体外壳之间发生碰撞而导致形变损坏;
5.同时,活动挡片只能对防尘散热窗进行遮挡,无法达到清理防尘散热窗的效果,防尘散热窗容易堵塞影响使用效果;
6.因此,我们提出一种新的机器人控制系统设备,以解决上述整线转盘电源线的收纳效果不佳以及活动挡片无法对防尘散热窗进行清理的问题。
技术实现要素:
7.本实用新型的目的在于提供一种机器人控制系统设备,以解决上述背景技术中提出的整线转盘电源线的收纳效果不佳以及活动挡片无法对防尘散热窗进行清理的问题。
8.为实现上述目的,本实用新型提供如下技术方案:一种机器人控制系统设备,包括设备外壳、散热窗和绕线组件,设备外壳的左右两侧下方均开设有散热窗,绕线组件焊接于设备外壳的右上角,设备外壳的左右两侧中间位置嵌入设置有调节组件,绕线组件的正面嵌入设置有固定板。
9.优选的,所述设备外壳的左右两侧面均开设有竖向设置的滑槽,所述滑槽的内部横向贯穿有调节组件,所述调节组件贯穿设备外壳的一端焊接有铁质的固定块,所述设备外壳的内部左右两侧内壁均固定有磁铁。
10.优选的,所述散热窗的外侧紧密贴合有防尘网,所述调节组件的外侧焊接有挡板,所述挡板的内侧设置有清理刷毛,所述清理刷毛紧密贴合于防尘网设置。
11.优选的,所述固定板的正面上方开设有两个并排设置的固定孔一。
12.优选的,所述固定板的正面下方开设有三个固定孔二,靠近所述固定板中心处的两个所述固定孔二为“八”字型分布,靠近固定板底部的固定孔二为垂直设置。
13.优选的,所述绕线组件的右侧嵌入设置有转轴,所述转轴贯穿然先组件右侧内壁的一端外侧套接有卷线轮,所述转轴的右侧固定有摇把。
14.优选的,所述设备外壳的内部安设有plc控制器。
15.与现有技术相比,本实用新型的有益效果是:
16.1、该种机器人控制系统设备,通过设置有固定板,固定板的内部设置有固定孔一以及固定孔二,通过固定孔一插接两脚插头,固定孔二则用于插接三角插头,在收纳电源线时能够对插头进行良好的固定,避免插头与异物碰撞而导致损坏的情况。
17.2、其次,该种机器人控制系统设备,通过设置有调节组件,调节组件的内部设置有用于遮蔽散热窗的挡板,同时挡板的内侧设置有清理刷毛,在移动调节组件的过程中,清理刷毛不断擦拭防尘网的外侧面,对防尘网达到清理的效果,保障了防尘网的正常使用。
附图说明
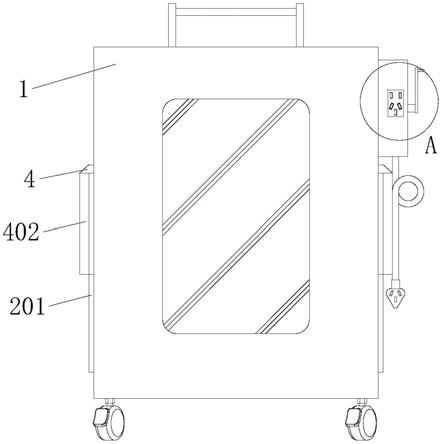
18.图1是本实用新型的整体结构示意图;
19.图2是本实用新型的整体结构剖视图;
20.图3是本实用新型的图2中沿a
‑
a处剖视图;
21.图4是本实用新型的图1中a处放大结构示意图。
22.图中:设备外壳1、滑槽101、磁铁102、plc控制器103、散热窗2、防尘网201、绕线组件3、转轴301、卷线轮302、调节组件4、固定块401、挡板402、清理刷毛403、固定板5、固定孔一501、固定孔二502。
具体实施方式
23.请参阅图1
‑
4,本实施例提供一种技术方案:一种机器人控制系统设备,包括设备外壳1、散热窗2和绕线组件3,设备外壳1的左右两侧下方均开设有散热窗2,绕线组件3焊接于设备外壳1的右上角,设备外壳1的左右两侧中间位置嵌入设置有调节组件4,绕线组件3的正面嵌入设置有固定板5。
24.进一步的,设备外壳1的左右两侧面均开设有竖向设置的滑槽101,滑槽101的内部横向贯穿有调节组件4,调节组件4贯穿设备外壳1的一端焊接有铁质的固定块401,设备外壳1的内部左右两侧内壁均固定有磁铁102,通过磁铁102对固定块401进行吸引,使得调节组件4能够定位在设备外壳1的外侧上方位置,避免调节组件4对散热窗2造成遮蔽,空气能够自由进入设备外壳1内部达到通风散热的效果。
25.进一步的,散热窗2的外侧紧密贴合有防尘网201,调节组件4的外侧焊接有挡板402,挡板402的内侧设置有清理刷毛403,清理刷毛403紧密贴合于防尘网201设置,向下移动固定块401时,固定块401脱离磁铁102的吸附,调节组件4下移,清理刷毛403贴合于防尘网201的外侧,刷除其外侧沾染的灰尘等杂质,保障防尘网201的透过性,同时固定块401完全下移至滑槽101最低点时,挡板402能够恰好将防尘网201进行遮挡,从而封闭散热窗2,在装置整体处于闲置状态时能够放置异物由散热窗2进入设备外壳1内部,达到保护设备外壳1内部电子元件的效果。
26.进一步的,固定板5的正面上方开设有两个并排设置的固定孔一501。
27.进一步的,固定板5的正面下方开设有三个固定孔二502,靠近固定板5中心处的两个固定孔二502为“八”字型分布,靠近固定板5底部的固定孔二502为垂直设置,三个固定孔二502分别对应采用三角插头的电源线,两个固定孔一501对应采用两脚插头的电源线,同时固定孔一501与固定孔二502的内部均包裹有一层厚度为两毫米的橡胶材质防滑垫,通过
防滑垫与插头引脚之间的摩擦力,能够对插头进行良好的限位,避免插头与异物碰撞而导致损坏的情况。
28.进一步的,绕线组件3的右侧嵌入设置有转轴301,转轴301贯穿然先组件3右侧内壁的一端外侧套接有卷线轮302,转轴301的右侧固定有摇把,卷线轮302的外侧缠绕有电源线,转动摇把时即可收放电源线。
29.进一步的,设备外壳1的内部安设有plc控制器103,通过plc控制器103实现对机器人的智能控制。
30.工作原理:
31.首先,装置整体处于闲置状态时,向下移动固定块401,调节组件4下移,然后,清理刷毛403经过防尘网201时,将其外侧的杂质刷除,同时挡板402遮挡住防尘网201;
32.接着,转动摇把将电源线收卷至卷线轮302外侧,将三角插头插入固定孔二502的内部,紧接着,将两脚插头插入固定孔一501的内部,通过防滑垫对插头进行固定,最后,通过装置底部设置的带有锁止结构的万向轮,将装置整体移动至相对应的位置并锁止万向轮。
技术特征:
1.一种机器人控制系统设备,包括设备外壳(1)、散热窗(2)和绕线组件(3),设备外壳(1)的左右两侧下方均开设有散热窗(2),绕线组件(3)焊接于设备外壳(1)的右上角,其特征在于:设备外壳(1)的左右两侧中间位置嵌入设置有调节组件(4),绕线组件(3)的正面嵌入设置有固定板(5)。2.根据权利要求1所述的一种机器人控制系统设备,其特征在于:所述设备外壳(1)的左右两侧面均开设有竖向设置的滑槽(101),所述滑槽(101)的内部横向贯穿有调节组件(4),所述调节组件(4)贯穿设备外壳(1)的一端焊接有铁质的固定块(401),所述设备外壳(1)的内部左右两侧内壁均固定有磁铁(102)。3.根据权利要求2所述的一种机器人控制系统设备,其特征在于:所述散热窗(2)的外侧紧密贴合有防尘网(201),所述调节组件(4)的外侧焊接有挡板(402),所述挡板(402)的内侧设置有清理刷毛(403),所述清理刷毛(403)紧密贴合于防尘网(201)设置。4.根据权利要求1所述的一种机器人控制系统设备,其特征在于:所述固定板(5)的正面上方开设有两个并排设置的固定孔一(501)。5.根据权利要求1或4所述的一种机器人控制系统设备,其特征在于:所述固定板(5)的正面下方开设有三个固定孔二(502),靠近所述固定板(5)中心处的两个所述固定孔二(502)为“八”字型分布,靠近固定板(5)底部的固定孔二(502)为垂直设置。6.根据权利要求1所述的一种机器人控制系统设备,其特征在于:所述绕线组件(3)的右侧嵌入设置有转轴(301),所述转轴(301)贯穿绕线组件(3)右侧内壁的一端外侧套接有卷线轮(302),所述转轴(301)的右侧固定有摇把。7.根据权利要求1所述的一种机器人控制系统设备,其特征在于:所述设备外壳(1)的内部安设有plc控制器(103)。
技术总结
本实用新型涉及机器人技术领域,具体为一种机器人控制系统设备,包括设备外壳、散热窗和绕线组件,设备外壳的左右两侧下方均开设有散热窗,绕线组件焊接于设备外壳的右上角,设备外壳的左右两侧中间位置嵌入设置有调节组件;该种机器人控制系统设备,通过设置有固定板,固定板的内部设置有固定孔一以及固定孔二,通过固定孔一插接两脚插头,固定孔二则用于插接三角插头,在收纳电源线时能够对插头进行良好的固定,避免插头与异物碰撞而导致损坏的情况。的情况。的情况。
技术研发人员:凌清
受保护的技术使用者:北京创想智控科技有限公司
技术研发日:2021.04.01
技术公布日:2021/11/2
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1