一种组合巡检机器人
1.本实用新型属于机器人巡检领域,具体是组合使用的巡检机器人及相关设计。
背景技术:
2.目前,巡检机器人主要通过在单一机器人上加装检测传感器、摄像头等实现对环境的感知;这种方式能够适应大多数检测环境并准确采集监控数据;但是上述方式无法适应复杂环境,且在大型机器人结构存在监控死角。申请号为201922202824.8的文献公开了一种场站式巡检机器人,包括基座、底盘驱动模块、环境检测传感器组模块、智能云台模块、摄像机模块、热成像仪模块、接口检测母板、超声波传感器模块、超声波传感器模块;基座底部安装底盘驱动模块等,该车体结构大,当对检测要求较高或场景复杂时,无法实现对环境的全面检测。因此,需要设计一种能够实现全面监控的巡检机器人,提高对环境的感知能力。
技术实现要素:
3.本实用新型拟解决的技术问题是针对现有技术的不足,提供一种组合巡检机器人。该装置采用双机器人协同工作的方式,通过一号机器人搭载的三级云梯结构的设计,云梯结构的伸缩功能同时具备平行伸缩与滑落能力,扩展了云梯所具备的功能,同时,云梯结构可与小型机器人配合,避免其在重力作用下可能发生的滑落。实用新型的主要目的在于实现对复杂条件下的环境监控,一号机器人体型大活动能力强,但存在无法感知的区域,所以使用二号小型机器人辅助监控,并结合云梯增强他的移动能力,可达到高处或者微小位置。例如在变电厂,部分设备安放紧密,大型机器人无法进入,或设备所处位置较高无法直接检测,或环境较危险无法人工实现,则可以由该设备实现。
4.本实用新型解决所述技术问题采用的技术方案是:
5.一种组合巡检机器人,包括一号机器人、二号机器人和云梯结构;其中,云梯结构位于一号机器人的上表面,二号机器人位于云梯结构上;
6.所述一号机器人包括第一行进装置、一号单片机、一号wifi模块、一号tf卡、一号烟雾传感器、一号可燃气体传感器、一号有害气体传感器、一号温度传感器、反射式光电传感器、超声波传感器、一号摄像头;
7.其连接关系为:一号单片机分别和一号wifi模块、一号tf卡、一号烟雾传感器、一号可燃气体传感器、一号有害气体传感器、一号温度传感器、反射式光电传感器、超声波传感器、一号摄像头相连;一号单片机、一号wifi模块、一号tf卡、一号烟雾传感器、一号可燃气体传感器、一号有害气体传感器位于第一行进装置中后部分,摄像头、一号温度传感器位于第一行进装置正前方、反射式光电传感器位于第一行进装置前部下方,且探测头正对地面,超声波传感器位于第一行进装置左右两侧与正前方;
8.所述二号机器人包括第二行进装置、二号单片机、二号wifi模块、二号tf卡、二号烟雾传感器、二号可燃气体传感器、二号有害气体传感器、二号温度传感器、二号摄像头、光
源扩展板;
9.其连接关系为:二号单片机分别和二号wifi模块、二号tf卡、二号烟雾传感器、二号可燃气体传感器、二号有害气体传感器、二号温度传感器、二号摄像头相连;
10.二号单片机、二号wifi模块、二号tf卡、二号烟雾传感器、二号可燃气体传感器、二号有害气体传感器、二号温度传感器位于第二行进装置上部中间,二号摄像头位于第二行进装置正前方;
11.所述的云梯结构包括云梯移动机构、云梯旋转机构、云梯和云梯伸缩机构;其中,云梯移动机构安装在一号机器人的上表面,云梯旋转机构位于云梯移动机构中间,且两端固定在其上;云梯的底端安装在云梯旋转机构的上表面,云梯的下部,还固定有云梯伸缩机构;
12.所述的云梯移动机构包括水平移动轴、水平移动平台、步进电机,步进电机滑块,步进电机轨道,步进电机丝杠,步进电机固定挡板;两个步进电机挡板两端均设置有内折的端板,相向设置、平行固定在一号机器人车体的上表面;每个步进电机挡板的端板的中部安装有一个步进电机丝杠,步进电机丝杠上、下各同样有一根步进电机轨道安装在端板上;步进电机滑块安装在2根步进电机轨道上,步进电机丝杠通过螺纹配合穿过步进电机滑块;两根水平移动轴平行,穿过圆盘状的水平移动平台,两端分别固定在步进电机滑块上;步进电机安装在步进电机挡板的前端板外侧,其驱动轴穿过前端板和步进电机丝杠相连;
13.所述的云梯旋转机构包括水平旋转平台、水平旋转轴、竖直电机、电动推杆一套筒、电动推杆一伸缩杆、电动推杆一头部、电动推杆一电机;其中,圆盘状水平旋转平台同轴安装在水平移动平台的上部,竖直电机固定在云梯移动机构的水平移动平台的中心的下部,其驱动轴与圆盘状水平旋转平台的中心相连;水平旋转轴通过轴承连接,安装在两个旋转轴安装座上,两个旋转轴安装座相向设置在水平旋转平台中部;电动推杆一套筒铰接于水平旋转平台上表面的凸台,该凸台位于水平旋转轴的一侧;电动推杆一伸缩杆可在电动推杆一套筒内滑动;电动推杆一头部底部与电动推杆一伸缩杆顶部螺纹连接,顶部与云梯结构一头部悬空架上凸台铰接;电动推杆一电机与电动推杆一套筒底部螺纹连接;
14.所述的云梯33包括云梯结构一、云梯结构二、云梯结构三;其中,云梯结构一主体为云梯基板,云梯基板的两侧有挡板,挡板的上部外侧设置有滑槽,云梯基板底端有一块立板,立板的中部且高于底端2
‑
3厘米处有一个连接凸起,该连接凸起有一个横向的通孔;云梯基板底端的上表面还固定有一个“锄头型”的悬空架,悬空架末端(即锄把)下部有一个带有横向通孔的凸台,该通孔与电动推杆一头部铰接,悬空架首部的板状结构(即锄头)和云梯基板底端的立板固连;云梯基板的三分之一到顶端中央,开有横截面为梯形槽;云梯结构二为云梯滑动板,中部下侧带有楞状凸起;所述的楞状凸起的横截面为梯形,尺寸与云梯基板上的梯形槽匹配,云梯结构二通过楞状凸起安装在云梯基板上;
15.云梯结构二底面靠顶部六分之一~五分之一处有一个圆柱型螺纹孔;
16.所述的云梯结构三为矩形板,两侧有折起的护板,护板内侧中部有凸起,底部有连接方孔;所述的云梯结构三通过护板的凸起安装在云梯结构一的挡板外侧的滑槽内,并且通过底部的连接方孔与云梯结构二(顶部)相连;
17.所述的云梯伸缩机构包括电动推杆二套筒、电动推杆二伸缩杆,电动推杆二销,电动推杆二电机;管状电动推杆二套筒与云梯结构一底部固连;柱状电动推杆二伸缩杆与柱
状电动推杆二销相固定;电动推杆二销与云梯结构二顶端螺纹孔相配合;电动推杆二电机与电动推杆二套筒固连。
18.所述的第二行进装置底部还设置有防滑机构,所述的防滑机构包括电机、防滑杆一、防滑杆二、防滑块;其中,防滑杆一与电机连接,防滑杆二两侧各与防滑杆一和防滑块铰接。
19.与现有技术相比,本实用新型的有益效果是:
20.(1)本实用新型能对现场环境进行多元化检测,并且自动进行,无需消耗人力操控。
21.(2)本实用新型能够实现现场环境多角度监控,二号机器人可携带照明设备,对死角进行检测。
22.(3)本实用新型避免了在现场环境下进行线路搭建等问题,更加简便高效。
23.(4)本实用新型能够将数据存储在机器人结构中,必要时可以调取记录。
附图说明
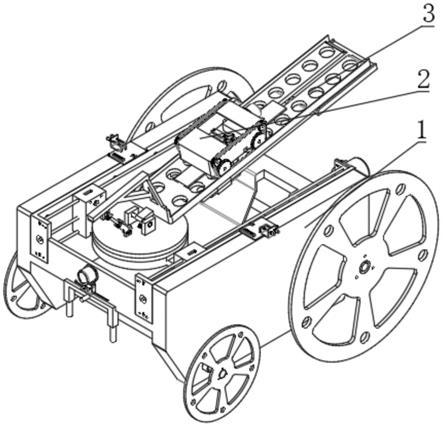
24.图1为本实用新型一号机器人的示意图;
25.图2为本实用新型一号机器人的正视图;
26.图3为本实用新型一号机器人的侧视图;
27.图4为本实用新型一号机器人的俯视图;
28.图5为本实用新型一号机器人云梯结构示意图;
29.图6为本实用新型一号机器人云梯移动机构示意图;
30.图7为本实用新型一号机器人云梯旋转机构示意图;
31.图8为本实用新型一号机器人云梯示意图;
32.图9为本实用新型一号机器人云梯伸缩机构示意图;
33.图10为本实用新型二号器人的示意图;
34.图11为本实用新型二号器人的正视图;
35.图12为本实用新型二号器人的侧视图;
36.图13为本实用新型二号器人的俯视图。
37.图中,1
‑
一号机器人;2
‑
二号机器人;
38.11
‑
一号单片机;12
‑
一号wifi模块;13
‑
一号tf卡;14
‑
一号烟雾传感器;15
‑
一号可燃气体传感器;16
‑
一号有害气体传感器;17
‑
一号温度传感器;18
‑
反射式光电传感器;19
‑
超声波传感器;110
‑
一号摄像头;111
‑
云梯结构;
39.21
‑
二号单片机;22
‑
二号wifi模块;23
‑
二号tf卡;24
‑
二号烟雾传感器;25
‑
二号可燃气体传感器;26
‑
二号有害气体传感器;27
‑
二号温度传感器;28
‑
二号摄像头;29
‑
光源扩展板;210
‑
履带结构;211
‑
防滑机构。
具体实施方式
40.下面结合附图和实施例对本实用新型进一步说明,但并不以此作为对本技术保护范围的限定。
41.本实用新型提供一种组合巡检机器人如图1所示,包括一号机器人1、二号机器人2
和云梯结构111;
42.所述的二号机器人2可以放置在一号机器人1的云梯结构3,并随云梯结构3引导下进行攀爬运动;二号机器人2的二号wifi模块22来自一号机器人1的一号wifi模块12的指令,从而实现一号机器人1对二号机器人2的控制;一号机器人1的一号wifi模块12可以向云平台上传监测数据并接受来自云平台的指令。
43.所述一号机器人1如图2
‑
图4所示,包括行进装置、一号单片机11、一号wifi模块12、一号tf卡13、一号烟雾传感器14、一号可燃气体传感器15、一号有害气体传感器16、一号温度传感器17、反射式光电传感器18、超声波传感器19、一号摄像头110;一号tf卡13 可以存储一号机器人1的监测数据;
44.其连接关系为:一号单片机11分别和一号wifi模块12、一号tf卡13、一号烟雾传感器14、一号可燃气体传感器15、一号有害气体传感器16、一号温度传感器17、反射式光电传感器18、超声波传感器19、一号摄像头110相连;一号单片机11、一号wifi模块12、一号tf卡13、一号烟雾传感器14、一号可燃气体传感器15、一号有害气体传感器16位于一号机器人车体中后部分,一号温度传感器17位于一号机器人车体正前方、反射式光电传感器 18位于一号机器人车体前部下方,且探测头正对地面,超声波传感器19位于一号机器人车体左右两侧与正前方;摄像头110位于一号机器人车体正前方。
45.所述的一号机器人的行进装置为公知器件,可以为汽车等轮式行进装置;这里具体可以采用的为ovinem电动四轮车车体结构进行初步改装(拆除座椅与车把),以实现自动控制与远程控制,同时该车体结构有足够的空间,可作为载体承载云梯结构3,从而辅助二号机器人2运动。云梯结构3在2
‑
3米范围内辅助二号机器人2自由运动,由于本实用新型应用于变电厂环境,云梯结构3进一步可以远程搭载于建筑物上,将辅助距离延伸至10米左右;
46.其中,一号wifi模块12、一号摄像头110与一号单片机11之间通过串口通讯,一号tf 卡13与一号单片机11之间通过spi方式通讯;
47.所述二号机器人2的结构如图13所示,包括第二行进装置、二号单片机21、二号wifi 模块22、二号tf卡23、二号烟雾传感器24、二号可燃气体传感器25、二号有害气体传感器 26、二号温度传感器27、二号摄像头28、光源扩展板29;二号tf卡23可以存储二号机器人2的监测数据;
48.其连接关系为:二号单片机21分别和二号wifi模块22、二号tf卡23、二号烟雾传感器24、二号可燃气体传感器25、二号有害气体传感器26、二号温度传感器27、二号摄像头 28相连;
49.二号wifi模块22、二号摄像头28与二号单片机21之间通过串口通讯,二号tf卡23 与二号单片机21之间通过spi方式通讯,光源扩展板29可直接连接二号摄像头28;
50.所述的光源拓展板可以直接插接在摄像头上,起到在黑暗环境下的补光作用,他的电源可以直接由摄像头提供。
51.二号单片机21、二号wifi模块22、二号tf卡23、二号烟雾传感器24、二号可燃气体传感器25、二号有害气体传感器26、二号温度传感器27位于第二行进装置中间位置,二号摄像头28位于第二行进装置正前方;
52.所述的云梯结构3如图5所示,包括云梯移动机构31、云梯旋转机构32、云梯33和云
梯伸缩机构34;其中,云梯旋转机构32安装在一号机器人的上表面,两侧安装有云梯移动机构31,前方为云梯伸缩机构34;云梯33的底端安装在云梯旋转机构32的上表面,云梯旋转机构32的中部下侧,与云梯伸缩机构34相连。
53.所述的云梯移动机构31如图6所示,包括水平移动轴311、水平移动平台312、步进电机313,步进电机滑块314,步进电机轨道315,步进电机丝杠316,步进电机固定挡板317;两个步进电机挡板317两端均设置有内折的端板,相向设置、平行固定在一号机器人车体的上表面;每个步进电机挡板317的端板的中部安装有一个步进电机丝杠316,步进电机丝杠 316上、下各同样有一根步进电机轨道315安装在端板上;步进电机滑块314安装在2根步进电机轨道315上,步进电机丝杠316通过螺纹配合穿过步进电机滑块314;两根水平移动轴311平行,穿过圆盘状的水平移动平台312,两端分别固定在步进电机滑块314上;步进电机313安装在步进电机挡板317的前端板外侧,其驱动轴穿过前端板和步进电机丝杠316 相连;
54.所述的云梯旋转机构32如图7所示,包括水平旋转平台321、水平旋转轴322、竖直电机323、电动推杆一套筒324、电动推杆一伸缩杆325、电动推杆一头部326、电动推杆一电机327;其中,竖直电机323固定在云梯移动机构31的水平移动平台312的中心的下部,其驱动轴与圆盘状水平旋转平台321的中心相连;水平旋转轴322通过轴承连接,安装在两个旋转轴安装座上,两个旋转轴安装座相向设置在水平旋转平台321中部;电动推杆一套筒324 铰接于水平旋转平台321上表面的凸台,该凸台位于水平旋转轴322的一侧;电动推杆一伸缩杆325可在电动推杆一套筒324内滑动;电动推杆一头部326底部与电动推杆一伸缩杆325 顶部螺纹连接,顶部与云梯结构一331头部悬空架上凸台铰接;电动推杆一电机327与电动推杆一套筒324底部螺纹连接;
55.所述的云梯33如图8所示,包括云梯结构一331、云梯结构二332、云梯结构三333;其中,云梯结构一331主体为云梯基板,云梯基板的两侧有挡板,挡板的上部外侧设置有滑槽,云梯基板底端中间有一个连接凸起,该连接凸起有一个横向的通孔;云梯基板底端的上表面还固定有一个“倒l型”的悬空架,悬空架末端下部有一个带有横向通孔的凸台,该通孔与电动推杆一头部326铰接,悬空架后部有一个45度朝下的支撑斜板,悬空架两侧有两个 60度朝下的支撑斜板;云梯基板的三分之一到顶端中央,开有横截面为梯形槽,云梯结构二 332为云梯滑动板,中部下侧带有楞状凸起;所述的楞状凸起的横截面为梯形,尺寸与云梯基板上的梯形槽匹配,云梯结构二332通过楞状凸起安装在云梯基板上(形成类似“公母榫”的配合结构,可以滑动);云梯基板的上表面两端,还可以均匀间隔分布有楞状凸起(相当于“搓板状”结构),用于配合二号机器人2的第二行进装置的履带行进,防止行进中第二机器人下滑;
56.云梯结构二332为云梯滑动板,底面靠顶部六分之一处有一个圆柱型螺纹孔;其作用是作为安装孔,与电动推杆二销343的上螺纹匹配;
57.所述的云梯结构三333为矩形板,两侧有折起的护板,护板内侧中部有凸起,底部有连接方孔;所述的云梯结构三333通过护板的凸起安装在云梯结构一331的挡板外侧的滑槽内,并且通过底部的连接方孔与云梯结构二332(顶部)相连;
58.云梯结构一331的云梯基板上分布有两列通孔,用于在保持强度的基础上减轻重量;云梯基板的底面有负责固定云梯伸缩机构34的螺纹孔,云梯结构一331底端与水平旋转
轴322 在云梯基板底端中间的连接凸起的横向通孔处使用光滑圆柱销进行固定,另一侧通过“公母榫”的配合结构与云梯结构二332光滑连接;
59.所述的云梯伸缩机构34如图9所示,包括电动推杆二套筒341、电动推杆二伸缩杆342,电动推杆二销343,电动推杆二电机344;管状电动推杆二套筒341与云梯结构一331底部螺纹固定;柱状电动推杆二伸缩杆341与柱状电动推杆二销343相固定;电动推杆二销343与云梯结构二332底部螺纹孔相配合;电动推杆二电机344与电动推杆二套筒341螺纹配合。
60.所述的云梯移动机构31,其中步进电机313驱动步进电机丝杠316转动,步进电机丝杠 316带动步进电机滑块314在步进电机轨道315上滑动,进一步带动水平移动轴315移动来来使得云梯33进行水平移动;所述的云梯旋转机构32中竖直电机323转动驱动水平旋转平台321水平旋转,电动推杆一伸缩杆325的移动可驱动云梯结构33做翻转运动;所述的云梯 33,顶部的方形挡板可防止二号机器人2向下滑动;所述的云梯伸缩机构34中电动推杆二伸缩杆342上的电动推杆二销343前后移动可带动云梯结构二332在云梯结构一331上滑动,当云梯结构三333完全脱离云梯结构一331挡板外侧的滑槽,云梯结构三333可因重力自由下落与目标位置形成角度,便于二号机器人2上下云梯结构3。
61.所述的第二行进装置为公知技术,可采用履带底盘结构的行进装置;该结构以履带部分为主体,能够增强二号机器人2在复杂环境下的运动能力,同时有足够的空间搭载相关结构,实现对微小位置的检测。
62.如图13所示,所述的第二行进装置底部设置有防滑机构211;所述的防滑机构211包括电机2111、防滑杆一2112、防滑杆二2113、防滑块2114。其中防滑杆一2112与电机2111 连接于中心,防滑杆二2113两侧各与防滑杆一2112和防滑块2114铰接。其中电机2111转动带动防滑杆一2112转动,进而带动防滑杆二2113转动,进而带动防滑块2114在滑槽中前后滑动。当第二行进装置运行到云梯结构的目标位之后,电机驱动防滑杆组合张开,使防滑块2114从主动齿轮和从动齿轮中间的空隙水平伸出后,抵住云梯结构一341两侧竖起挡板的中部,防止二号机器人2在云梯结构3上滑动。
63.本实施例中,一号单片机11为stm32f103zet6单片机;一号wifi模块12为esp8266wifi 模块;一号tf卡13为128mtf卡;一号烟雾传感器14为mq
‑
2气体传感器;一号可燃气体传感器15为mq
‑
5气体传感器;一号有害气体传感器16为mq
‑
135气体传感器;一号温度传感器17为mlx90614非接触式红外温度传感器;反射式光电传感器18采用tcrt
‑
500反射型光电传感器;超声波传感器19采用hc
‑
sr04超声波测距模块的组合;一号摄像头110为 openmv4h7摄像头;二号单片机21为stm32f103c8t6单片机;二号wifi模块22为esp8266wifi 模块;二号tf卡23为128mtf卡;二号烟雾传感器24为mq
‑
2气体传感器;二号可燃气体传感器25为mq
‑
5气体传感器;二号有害气体传感器26为mq
‑
135气体传感器;二号温度传感器27为ds18b20温度传感器;二号摄像头28为openmv4h7摄像头;光源扩展板29为openmv 光源拓展板。
64.某处在发生异常状况时,会引起环境中的检测指标的连锁反应,数据异常检测方法主要在于解决在行进过程中气流等外界干扰因素带来的数据测量异常现象,数据异常检测方法具体如下:
65.1.读取监测数据v
i
=[mq2
i
,mq5
i
,mq135
i
,t
i
](i=1,2...n),i表示不同的检测时刻,n表示数据组数,并且为检测到的异常数据。
[0066]
δ
i
=v
i+1
‑
v
i
=[δmq2
i
,δmq5
i
,δmq135
i
,δt
i
],δ
i
表示不同时刻的测量梯度
[0067]
2.取α
i
∈(α1,α2),采用kmeans算法,将δ
i
作输入数据集,α
i
作为初始化聚类数量进行遍历。
[0068]2‑
1)获得输出的聚类簇c=(c1,c2...c
n
),簇中心点β
i
=(β1,β2...β
n
), n=α
i
。
[0069]2‑
2)计算不同簇的密度ρ
j
=n
j
/l
j
,n
j
表示不同簇的数据组数,l
j
表示簇内数据到中心点的最大距离,距离计算采用欧式距离。并取返回2
‑1[0070]2‑
3)获得所有取p=min(ρ
*
),若p≥β,则认为当前数据流检测正确,否则错误,β为检测阈值。
[0071]
本实用新型设计的软件和协议均为公知技术。
[0072]
本实用新型的工作原理和工作流程是:
[0073]
一号机器人在未接收到云平台指令时可以按照固定轨迹巡检,并将相关监测数据存储在 tf卡中,当必要时可以从tf卡中读取,同时监测数据可以通过wifi模块上传至云平台;当出现一号机器人的监控死角时,通过一号wifi模块想二号wifi模块发送指令,同时调整云梯辅助二号机器人运动之目标地点,之后二号机器人运动至目标地点进行检测,二号机器人的监测数据也可以存储在tf卡中并上传云平台;二号机器人的履带结构能够适应复杂的场地环境;
[0074]
一号机器人接收到云平台指令后可以按照指令检测目标、调整云梯姿态或者间接控制二号机器人进行检测。
[0075]
本实用新型未述及之处适用于现有技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1