一种适用范围广的多轴伺服机械手的制作方法
1.本技术涉及伺服机械手的领域,尤其是涉及一种适用范围广的多轴伺服机械手。
背景技术:
2.伺服机械手是注塑机机械手较为常见的机械手之一,一般分为单轴伺服机械手、三轴伺服机械手及五轴伺服机械手,它模仿人的手臂可用于自动剪水口、模内镶件、模内贴标、模外组装、整形、分类、堆叠、产品包装、模具优化等等,在实践应用可以在减轻繁重的体力劳动、改善劳动条件和安全生产;提高注塑成型机的生产效率、稳定产品质量、降低废品率、降低生产成本、增强企业的竞争力等方面起到及其重要的作用。
3.现有多轴伺服机械手,所涉及到设备安装组件,通常只能通过设定命令程序完成对应的一项动作,使得在实际应用的过程中,适用的范围不够广。
4.针对上述中的相关技术,发明人认为多轴伺服机械手存在有在实际应用的过程中,适用的范围不够广的缺陷。
技术实现要素:
5.为了解决上述所提出的问题,本技术提供一种适用范围广的多轴伺服机械手。
6.本技术提供的一种适用范围广的多轴伺服机械手采用如下的技术方案:
7.一种适用范围广的多轴伺服机械手,包括支撑块,所述支撑块上方设置有三号工作腔,所述支撑块上方通过所述三号工作腔固定连接有固定框,所述固定框内壁一侧通过轴承转动连接有二号丝杆,所述固定框外表面焊接有二号工作腔,所述二号丝杆外表面旋合连接有一号丝杆块,所述二号丝杆外表面通过所述一号丝杆块固定连接有限位块,所述限位块外表面粘接有橡胶垫,所述限位块内壁焊接有液压杆,且所述液压杆外表面下方设置有模具块。
8.通过采用上述技术方案,通过二号工作腔与三号工作腔内部的电机,带动两侧二号丝杆进行转动,使得一号丝杆块进行相向移动,进而使得两侧限位块也能进行同步移动,保证对物品的夹持固定,通过液压杆带动模具块不断进行伸缩移动,对传送带上在模具待成型的熔融状物进行印刻相关的出厂标识,从而扩大了该装置适用的范围。
9.优选的,所述液压杆外表面焊接有三号固定块,所述三号固定块内部旋合连接有限位螺栓,所述模具块上表面焊接有二号固定块。
10.通过采用上述技术方案,通过三号固定块转动下移与二号固定块内部进行旋合连接,从而保证了对模具块在液压杆末端的稳定性,同时通此方式,方便使用者快速更换不同的模具块。
11.优选的,所述支撑块内壁一侧转动连接有一号丝杆,所述一号丝杆外表面旋合连接有二号丝杆块,所述支撑块外表面焊接有一号工作腔。
12.通过采用上述技术方案,二号丝杆块上表面与三号工作腔下表面相焊接,便于一号工作腔内部电机带动一号丝杆转动,进而保证了二号丝杆块与三号工作腔的移动。
13.优选的,所述固定框内壁一侧焊接有一号固定块。
14.通过采用上述技术方案,在一号固定块内部两侧分别与两侧固定框对应一侧末端相转动连接,使得既能保证两侧二号丝杆一侧的支撑性,同时又不会影响到两侧二号丝杆的转动。
15.优选的,所述支撑块外表面一体成型有若干个固定板。
16.通过采用上述技术方案,在固定板内部开设有沉孔,便于支撑块螺栓通过固定板的沉孔与工作台进行固定,保证支撑块的稳定性。
17.综上所述,本技术包括以下有益技术效果:在模具块下表面嵌刻有信息标识的字样,使得可以通过液压杆带动模具块不断进行伸缩移动,对传送带上在模具待成型的熔融状物进行印刻相关的出厂标识,从而扩大了该装置适用的范围,进一步提高了实用性。通过三号固定块转动下移与二号固定块内部进行旋合连接,从而保证了对模具块在液压杆末端的稳定性,同时通此方式,方便使用者快速更换不同的模具块。
附图说明
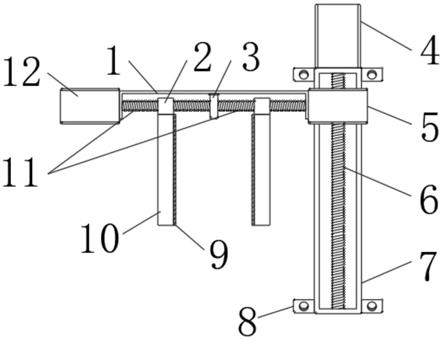
18.图1是申请实施例的装置主体俯视的结构示意图;
19.图2是申请实施例的限位块侧视剖面连接的结构示意图;
20.图3是申请实施例的a处细节连接放大的结构示意图;
21.图4是申请实施例的支撑块侧视剖面连接的结构示意图。
22.附图标记说明:1、固定框;2、一号丝杆块;3、一号固定块;4、一号工作腔;5、三号工作腔;6、一号丝杆;7、支撑块;8、固定板;9、橡胶垫;10、限位块;11、二号丝杆;12、二号工作腔;13、液压杆;14、模具块;15、二号固定块;16、三号固定块;17、限位螺栓;18、二号丝杆块。
具体实施方式
23.以下结合附图1
‑
4对本技术作进一步详细说明。
24.本技术实施例公开一种适用范围广的多轴伺服机械手。参照图1和图4,一种适用范围广的多轴伺服机械手,在支撑块7外表面四个拐角位置处均一体成型有固定板8,且固定板8内部开设有沉孔,便于支撑块7螺栓通过固定板8的沉孔与工作台进行固定,保证支撑块7的稳定性,在支撑块7外表面一侧焊接有一号工作腔4,且一号工作腔4内部设置有电机,同时在一号工作腔4内部一侧开设有槽口,另外支撑块7内部与一号工作腔4槽口对应位置处也开设有相应的槽口,便于一号丝杆6一侧依次贯穿于支撑块7和一号工作腔4内部一侧与电机一侧相焊接,便于通过电机带动一号丝杆6进行转动,在一号丝杆6外表面远离一号工作腔4一侧末端通过轴承与支撑块7内壁一侧相转动连接,使得既能保证一号丝杆6一侧的支撑性,又不影响一号丝杆6的转动,在一号丝杆6外表面旋合连接有二号丝杆块18,且二号丝杆块18上表面与三号工作腔5下表面相焊接,便于一号丝杆6转动,带动二号丝杆块18与三号工作腔5的移动,在支撑块7内部上方开设有槽口,避免影响到三号工作腔5的移动。
25.参照图1,在三号工作腔5外表面一侧焊接有固定框1,且在固定框1外表面远离三号工作腔5一侧焊接有二号工作腔12,同时在固定框1内部两侧均开设有槽口,且两侧槽口与二号工作腔12和三号工作腔5对应位置处也均开设有槽口,同时在二号工作腔12和三号工作腔5内部安装有电机,便于二号丝杆11一侧通过相对应的槽口,穿过固定框1的内部到
达二号工作腔12和三号工作腔5内部与电机一侧相焊接,便于电机带动固定框1下方两个二号丝杆11进行转动,在二号丝杆11外表面旋合连接有一号丝杆块2,且一号丝杆块2外表面一侧与限位块10相焊接,便于通过二号丝杆11的转动,带动两侧的一号丝杆块2和限位块10相向移动,达到对物品的稳定夹持,便于对物品的搬运,在限位块10外表面一侧粘接有橡胶垫9,避免限位块10对物品进行夹持时,造成物品的外表面的划伤,在固定框1内壁中间位置处焊接有一号固定块3,且一号固定块3内部两侧分别与两侧固定框1对应一侧末端相转动连接,使得既能保证两侧二号丝杆11一侧的支撑性,同时又不会影响到两侧二号丝杆11的转动。
26.参照图2和图3,在限位块10内部一侧开设有凹槽,便于液压杆13在限位块10内部进行安装,在液压杆13外表面一侧末端设置有模具块14,且在模具块14下表面嵌刻有信息标识,使得可以通过液压杆13带动模具块14不断进行伸缩移动,对传送带上在模具待成型的熔融状物进行印刻相关的出厂标识,从而扩大了该装置适用的范围,进一步提高了实用性。
27.参照图3,在液压杆13外表面两侧均焊接有三号固定块16,且三号固定块16内部开设有旋合槽口,使得便于与限位螺栓17进行旋合连接,在模具块14上表面两侧均焊接有二号固定块15,且二号固定块15内部也开设有与三号固定块16内部相同的旋合槽口,且两旋合槽口位置相对应,便于通过三号固定块16转动下移与二号固定块15内部进行旋合连接,从而保证了对模具块14在液压杆13末端的稳定性,同时通此方式,方便使用者快速更换不同的模具块14。
28.本技术实施例一种适用范围广的多轴伺服机械手的实施原理为:通过在支撑块7外表面一体成型有若干个固定板8,且固定板8内部开设有沉孔,从而便于支撑块7螺栓通过固定板8的沉孔与工作台进行固定,保证支撑块7的稳定性,在二号工作腔12与三号工作腔5内部均设置有电机,且二号工作腔12内部电机一侧与对应程侧的二号丝杆11相焊接,三号工作腔5内部电机一侧与对应侧的二号丝杆11一侧相连接,从而便于通过外接电源,启动电机,带动两侧二号丝杆11进行转动,从而带动一号丝杆块2进行相向移动,进而使得两侧限位块10也能进行同步移动,保证对物品的夹持固定,同时在一号工作腔4内部也设置有电机,且电机一侧与一号丝杆6对应一侧相焊接,从而通过外接电源对启动电机,带动一号丝杆6进行转动,进而带动二号丝杆块18和三号工作腔5进行移动位置移动,使得限位块10可以进行随着三号工作腔5移动而移动,便于对限位块10夹持固定物品,进行搬运,同时在限位块10内壁焊接有液压杆13,且液压杆13下方设置有模具块14,同时在模具块14下表面嵌刻有信息标识的字样,使得可以通过液压杆13带动模具块14不断进行伸缩移动,对传送带上在模具待成型的熔融状物进行印刻相关的出厂标识,从而扩大了该装置适用的范围,进一步提高了实用性。
29.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1