一种基于图像定位的FOD风吸机械臂装置的制作方法
一种基于图像定位的fod风吸机械臂装置
技术领域
1.本实用新型涉及机场异物清扫设备技术领域,具体为一种基于图像定位的fod风吸机械臂装置。
背景技术:
2.机场道路异物fod,即可能损伤飞机或系统的某种外来的物质、碎屑或物体。fod带来的危害不仅会损坏飞机和夺去宝贵的生命,而且还伴随着巨大的经济损失。
3.目前市场上几乎所有清扫机器人或者清扫车的清扫装置都是采用滚扫、风吸或者二者相结合而方式,这种形式适用于慢速、连续作业的工作模式,在这种工作模式下清扫耗材费用高、工作速度慢。因为机场跑道,尤其是机场的跑道飞机起降频率高、对道面清洁度要求高,异物分散且数量较少等特点,所以常用的清扫装置就很难适用了。
技术实现要素:
4.本实用新型的目的在于提供一种基于图像定位的fod风吸机械臂装置,不仅可以解决传统清扫装置在机场跑道这个特殊环境下的局限性,而且还大大的增加了系统的柔性化程度和执行效率。
5.为实现上述目的,本实用新型提供如下技术方案:一种基于图像定位的fod风吸机械臂装置,包括六轴机械手、工业相机、风吸装置和控制电路板;所述工业相机设置于所述六轴机械手的末端识别区域前方,所述风吸装置设置于所述六轴机械手的一侧且位于所述工业相机的下部;所述工业相机识别异物信息并发送至所述控制电路板,所述控制电路板接收工业相机识别的异物信息并控制所述六轴机械手转动将位于风吸装置的异物定点移除;在使用时,风吸机械臂装置设置于智能化机场跑道异物清扫设备上,然后将工业相机置于六轴机械手末端识别区域前方,与六轴机械手构成机械手视觉引导系统,当智能化清扫设备在机场跑道通过自主导航运行至异物上方后,工业相机开始执行识别、定位操作,并通过控制电路板准确将六轴机械手移动到异物上方,通过配置的风吸装置将异物定点移除。
6.作为上述技术方案的进一步改进,所述风吸装置的前端设置有真空吸嘴用于吸取异物。
7.作为上述技术方案的进一步改进,所述控制电路板包括x86核心控制板、千兆以太网口、交换机和机械手控制器;所述千兆以太网口一端与所述x86核心控制板连接,所述千兆以太网口的另一端与所述交换机连接;所述交换机分别与所述工业相机和机械手控制器连接,所述机械手控制器设置于所述风吸机械臂装置上。
8.作为上述技术方案的进一步改进,所述控制电路板还包括辅助外设系统,所述辅助外设系统通过i/o口与所述x86核心控制板连接,进而方便操作控制电路板。
9.作为上述技术方案的进一步改进,所述控制电路板还包示教器,所述示教器通过usb接口与所述x86核心控制板连接。
10.与现有技术相比,本实用新型的有益效果是:工业相机置于六轴机械手末端识别
区域前方,与六轴机械手构成机械手视觉引导系统,当智能化清扫设备在机场跑道通过自主导航运行至异物上方后,工业相机开始执行识别、定位操作,并通过控制电路板准确将六轴机械手移动到异物上方,通过配置的风吸装置将异物定点移除;不仅可以解决传统清扫装置在机场跑道这个特殊环境下的局限性,而且还大大的增加了系统的柔性化程度和执行效率。
附图说明
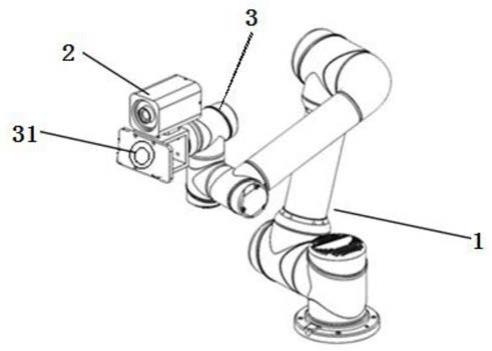
11.图1所示为本实用新型的风吸机械臂结构示意图;
12.图2所示为本实用新型的控制电路板结构示意图。
13.附图标记:1是六轴机械手、2是工业相机、3是风吸装置、4是控制电路板、31是真空吸嘴、41是x86核心控制板、42是千兆以太网口、43是交换机、44是机械手控制器、45是辅助外设系统、46是i/o口、47是示教器、48是usb接口。
具体实施方式
14.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
15.参考图1
‑
2所示,一种基于图像定位的fod风吸机械臂装置,包括六轴机械手1、工业相机2、风吸装置3和控制电路板4;所述工业相机2设置于所述六轴机械手1的末端识别区域前方,所述风吸装置3设置于所述六轴机械手1的一侧且位于所述工业相机2的下部;所述工业相机2识别异物信息并发送至所述控制电路板4,所述控制电路板4接收工业相机2识别的异物信息并控制所述六轴机械手1转动将位于风吸装置3的异物定点移除;在使用时,风吸机械臂装置设置于智能化机场跑道异物清扫设备上,然后将工业相机2置于六轴机械手1末端识别区域前方,与六轴机械手1构成机械手视觉引导系统,当智能化清扫设备在机场跑道通过自主导航运行至异物上方后,工业相机2开始执行识别、定位操作,并通过控制电路板4准确将六轴机械手1移动到异物上方,通过配置的风吸装置3将异物定点移除;不仅可以解决传统清扫装置在机场跑道这个特殊环境下的局限性,而且还大大的增加了系统的柔性化程度和执行效率。
16.具体的,所述风吸装置3的前端设置有真空吸嘴31用于吸取异物。
17.具体的,为了实现风吸机械臂装置的控制,所述控制电路板4包括x86核心控制板41、千兆以太网口42、交换机43和机械手控制器44;所述千兆以太网口42一端与所述x86核心控制板41连接,所述千兆以太网口42的另一端与所述交换机43连接;所述交换机43分别与所述工业相机2和机械手控制器44连接,所述机械手控制器44设置于所述风吸机械臂装置上。
18.具体的,所述控制电路板4还包括辅助外设系统45,所述辅助外设系统45通过i/o口46与所述x86核心控制板41连接,进而方便操作控制电路板4。
19.具体的,所述控制电路板4还包示教器47,所述示教器47通过usb接口48与所述x86核心控制板41连接;示教器41能够实现对控制电路板4的手动操纵、程序编写、参数配置以
及监控。
20.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
21.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
技术特征:
1.一种基于图像定位的fod风吸机械臂装置,其特征在于,包括六轴机械手(1)、工业相机(2)、风吸装置(3)和控制电路板(4);所述工业相机(2)设置于所述六轴机械手(1)的末端识别区域前方,所述风吸装置(3)设置于所述六轴机械手(1)的一侧且位于所述工业相机(2)的下部;所述工业相机(2)识别异物信息并发送至所述控制电路板(4),所述控制电路板(4)接收工业相机(2)识别的异物信息并控制所述六轴机械手(1)转动将位于风吸装置(3)的异物定点移除。2.根据权利要求1所述的一种基于图像定位的fod风吸机械臂装置,其特征在于,所述风吸装置(3)的前端设置有真空吸嘴(31)。3.根据权利要求1所述的一种基于图像定位的fod风吸机械臂装置,其特征在于,所述控制电路板(4)包括x86核心控制板(41)、千兆以太网口(42)、交换机(43)和机械手控制器(44);所述千兆以太网口(42)一端与所述x86核心控制板(41)连接,所述千兆以太网口(42)的另一端与所述交换机(43)连接;所述交换机(43)分别与所述工业相机(2)和机械手控制器(44)连接,所述机械手控制器(44)设置于所述风吸机械臂装置上。4.根据权利要求3所述的一种基于图像定位的fod风吸机械臂装置,其特征在于,所述控制电路板(4)还包括辅助外设系统(45)。5.根据权利要求4所述的一种基于图像定位的fod风吸机械臂装置,其特征在于,所述辅助外设系统(45)通过i/o口(46)与所述x86核心控制板(41)连接。6.根据权利要求3所述的一种基于图像定位的fod风吸机械臂装置,其特征在于,所述控制电路板(4)还包示教器(47)。7.根据权利要求6所述的一种基于图像定位的fod风吸机械臂装置,其特征在于,所述示教器(47)通过usb接口(48)与所述x86核心控制板(41)连接。
技术总结
本实用新型提供一种基于图像定位的FOD风吸机械臂装置,包括六轴机械手、工业相机、风吸装置和控制电路板;所述工业相机设置于所述六轴机械手的末端识别区域前方,所述风吸装置设置于所述六轴机械手的一侧且位于所述工业相机的下部;所述工业相机识别异物信息并发送至所述控制电路板,所述控制电路板接收工业相机识别的异物信息并控制所述六轴机械手转动将位于风吸装置的异物定点移除;FOD风吸机械臂装置不仅可以解决传统清扫装置在机场跑道这个特殊环境下的局限性,而且还大大的增加了系统的柔性化程度和执行效率。统的柔性化程度和执行效率。统的柔性化程度和执行效率。
技术研发人员:勾志阳 裘宏伟 王贺 韩小刚 吴树林
受保护的技术使用者:普达迪泰(天津)智能装备科技有限公司
技术研发日:2021.06.01
技术公布日:2021/12/30
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1