一种器械加工用智能夹紧机械手的制作方法
1.本实用新型涉及机械手技术领域,具体为一种器械加工用智能夹紧机械手。
背景技术:
2.智能夹紧机械手是一种具有智能操控的机械手,其主要的目的是将物体进行夹紧在对其进行搬运节省了人力,提高的工作效率。
3.现有的智能夹紧机械手的夹具宽度是固定不变的,当需要夹紧不同厚度的物体时现有的智能夹紧机械手就难以进行夹紧,使得其工作范围变小。
4.需要一种器械加工用智能夹紧机械手,以解决上述问题。
技术实现要素:
5.本实用新型的目的在于提供一种器械加工用智能夹紧机械手,以解决上述背景技术中提出现有的智能夹紧机械手的夹具宽度是固定不变的,当需要夹紧不同宽度的物体时现有的智能夹紧机械手就难以进行夹紧,使得其工作范围变小的问题。
6.为实现上述目的,本实用新型提供如下技术方案:一种器械加工用智能夹紧机械手,包括旋转盘;
7.连接机臂,所述连接机臂设置在所述旋转盘的上方;
8.固定机臂,所述固定机臂设置在所述连接机臂的上方;
9.箱体,所述箱体设置在所述固定机臂的左端;
10.气缸,所述气缸设置在所述箱体的上方;
11.夹紧机构,所述夹紧机构设置在所述箱体的内部;
12.限位机构,所述限位机构设置在所述夹紧机构的内部。
13.优选的,所述夹紧机构包括有:
14.第一支撑板,所述第一支撑板滑动连接在所述箱体的内侧;
15.第一孔洞,所述第一孔洞设置在所述第一支撑板的内部;
16.第一连接杆,所述第一连接杆设置在所述第一孔洞的内部;
17.第二支撑板,所述第二支撑板设置在所述第一支撑板的右侧;
18.第二孔洞,所述第二孔洞设置在所述第二支撑板 的内部;
19.第二连接杆,所述第二连接杆设置在所述第一连接杆的右端;
20.第三孔洞,所述第三孔洞设置在所述箱体的下方内部。
21.采用上述技术方案,使得装置可以对不同厚度的物体进行夹紧。
22.优选的,所述第二支撑板与箱体的连接方式固定连接,且第二孔洞关于第二支撑板的中心轴线对称,并且第二孔洞的宽度与第一连接杆的宽度一致。
23.采用上述技术方案,使得装置在夹紧时夹具不会发生晃动。
24.优选的,所述限位机构包括有:
25.第一夹具,所述第一夹具固定连接在所述第二连接杆的下端;
26.第一凹槽,所述第一凹槽设置在所述第一夹具的内部;
27.第一弹簧,所述第一弹簧设置在所述第一凹槽的内部;
28.推板,所述推板设置在所述第一弹簧的下方;
29.第四孔洞,所述第四孔洞设置在所述第一凹槽的前侧;
30.第三连接杆,所述第三连接杆设置在所述推板的下方;
31.挡板,所述挡板设置在所述第三连接杆的前侧;
32.第二凹槽,所述第二凹槽设置在所述第三连接杆的内部;
33.第二弹簧,所述第二弹簧设置在所述第二凹槽的内部;
34.过渡板,所述过渡板设置在所述挡板的下方;
35.第三支撑板,所述第三支撑板设置在所述第一夹具的前侧;
36.第五孔洞,所述第五孔洞设置在所述第三支撑板的内部;
37.限位板,所述限位板设置在所述第五孔洞的内部;
38.第三弹簧,所述第三弹簧设置在所述限位板的前侧;
39.第二夹具,所述第二夹具设置在所述第三连接杆的下端;
40.卡块,所述卡块固定连接在所述限位板的内部。
41.采用上述技术方案,使得便于调节夹具宽度适应不同的物体。
42.优选的,所述第三连接杆与第一夹具的连接方式为滑动连接,且挡板等距分布在第三连接杆的外侧,并且挡板与第三连接杆的连接方式为固定连接。
43.采用上述技术方案,使得在夹具调节后不会夹具不会发生晃动。
44.优选的,所述卡块左端下方为圆弧形,且卡块垂直与第一夹具。
45.采用上述技术方案,使得卡块可以进行左右运动对夹具进行限位。
46.与现有技术相比,本实用新型的有益效果是:该器械加工用智能夹紧机械手,通过设置有限位机构,使得夹紧机械手的夹具便于进行伸长和进行压缩,且可以在是伸长和压缩过后便于得到限位,以使得夹紧机械手可以对不同厚度的物体进行夹紧,从而达到装置使用范围广的目的。
附图说明
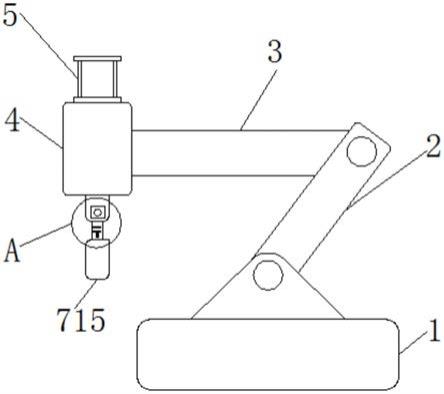
47.图1为本实用新型主视结构示意图;
48.图2为本实用新型俯视结构示意图;
49.图3为本实用新型图2中c-c处结构示意图;
50.图4为本实用新型图2中d-d处结构示意图;
51.图5为本实用新型图1中a处结构示意图;
52.图6本实用新型图4中b处结构示意图。
53.图中:1、旋转盘;2、连接机臂;3、固定机臂;4、箱体;5、气缸;6、夹紧机构;7、限位机构;601、第一支撑板;602、第一孔洞;603、第一连接杆;604、第二支撑板;605、第二孔洞;606、第二连接杆;607、第三孔洞;701、第一夹具;702、第一凹槽;703、第一弹簧;704、推板;705、第四孔洞;706、第三连接杆;707、挡板;708、第二凹槽;709、第二弹簧;710、过渡板;711、第三支撑板;712、第五孔洞;713、限位板;714、第三弹簧;715、第二夹具;716、卡块。
具体实施方式
54.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在所述没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
55.请参阅图1-6,本实用新型提供一种技术方案:一种器械加工用智能夹紧机械手,包括旋转盘1和连接机臂2,连接机臂2设置在旋转盘1的上方;固定机臂3,固定机臂3设置在连接机臂2的上方;箱体4,箱体4设置在固定机臂3的左端;气缸5,气缸5设置在箱体4的上方;
56.夹紧机构6,夹紧机构6设置在箱体4的内部;夹紧机构6包括有:第一支撑板601,第一支撑板601滑动连接在箱体4的内侧;第一孔洞602,第一孔洞602设置在第一支撑板601的内部;第一连接杆603,第一连接杆603设置在第一孔洞602的内部;第二支撑板604,第二支撑板604设置在第一支撑板601的右侧;第二孔洞605,第二孔洞605设置在第二支撑板604 的内部;第二连接杆606,第二连接杆606设置在第一连接杆603的右端;第三孔洞607,第三孔洞607设置在箱体4的下方内部;第二支撑板604与箱体4的连接方式固定连接,且第二孔洞605关于第二支撑板604的中心轴线对称,并且第二孔洞605的宽度与第一连接杆603的宽度一致;通过启动气缸5带动第一支撑板601进行上下运动,使得第一连接杆603沿着第三孔洞607的轨迹向中间运动,以使得第二连接杆606和夹具向中间进行运动,对物体进行夹紧;
57.限位机构7,限位机构7设置在夹紧机构6的内部;限位机构7包括有:第一夹具701,第一夹具701固定连接在第二连接杆606的下端;第一凹槽702,第一凹槽702设置在第一夹具701的内部;第一弹簧703,第一弹簧703设置在第一凹槽702的内部;推板704,推板704设置在第一弹簧703的下方;第四孔洞705,第四孔洞705设置在第一凹槽702的前侧;第三连接杆706,第三连接杆706设置在推板704的下方;挡板707,挡板707设置在第三连接杆706的前侧;第二凹槽708,第二凹槽708设置在第三连接杆706的内部;第二弹簧709,第二弹簧709设置在第二凹槽708的内部;过渡板710,过渡板710设置在挡板707的下方;第三支撑板711,第三支撑板711设置在第一夹具701的前侧;第五孔洞712,第五孔洞712设置在第三支撑板711的内部;限位板713,限位板713设置在第五孔洞712的内部;第三弹簧714,第三弹簧714设置在限位板713的前侧;第二夹具715,第二夹具715设置在第三连接杆706的下端;卡块716,卡块716固定连接在限位板713的内部;第三连接杆706与第一夹具701的连接方式为滑动连接,且挡板707等距分布在第三连接杆706的外侧,并且挡板707与第三连接杆706的连接方式为固定连接;卡块716左端下方为圆弧形,且卡块716垂直于第一夹具701;通过推动第二夹具715向上进行运动,使得挡板707向上进行运动,以使得挡板707运动到卡块716的上方,使得卡块716对挡板707和第三连接杆706进行限位,使得夹具的夹紧物体的厚度变小,再次推动气缸5向上运动,使得过渡板710运动到卡块716的上方,拉动第二夹具715向下运动,使得卡块716沿着过渡板710与挡板707的外侧表面运动到挡板707的上方,使得夹具的夹紧物体的厚度变大,以使得夹紧机械手可以对不同厚度的物体进行夹紧,从而达到装置使用范围广的目的。
58.需要理解的是,术语“中心”、“纵向”、“横向”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,
仅是为便于描述本发明和简化描述,而不是指示或暗指所指的装置或元件必须具有特定的方位、为特定的方位构造和操作,因而不能理解为对本实用新型保护内容的限制。
59.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在所述不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1